Navigation : EXPO21XX > AUTOMATION 21XX >
H05: Universities and Research in Robotics
> Tsinghua University,
Tsinghua University,


- Offer Profile
- The Robotics and Automation Laboratory is one of the earliest founded laboratories that focuses on robotics theory and technology in China. In the recent years, at the robots research field, based on advanced manufacturing subject, aiming at the astronatic technology (micro satellites), the bio-science (gene analysis medical treatment), entertainment and the needs of special intelligent robots applied in the high-tech field such as non-traditional machining and operation, the Automation and Robotics Laboratory has already started series of research.
Product Portfolio
Research Areas
- The research areas include but not limited to the
follows:
- l Mecidical and Life Science Robot System
- l Special Manipulation Robot System
- l Humanoid Robots
- l Special Mobile Robots
- l Robotic System and Automation
3D Ultrasound-based Robotic System for Hepatic Tumors

-
A needle insertion robotic system for ultrasound-guided hepatic microwave
coagulation therapy is under developing. It is composed of a needle
insertion robot, a surgical planning subsystem and a pose tracking device.
Mission :- Reconstruct the 3D tumor model using 2D ultrasound images
- Guide the needle insertion to the center of tumors with robotic system
Content:
- Image technology including reconstruction and registration algorithm
- Error studies on diagnostic imaging, registration base on markers and robot mechanism Calibration methods for the whole system
Introduction:
-
A needle insertion robotic system for ultrasound-guided hepatic microwave
coagulation therapy is under developing. It is composed of a needle
insertion robot, a surgical planning subsystem and a pose tracking device.
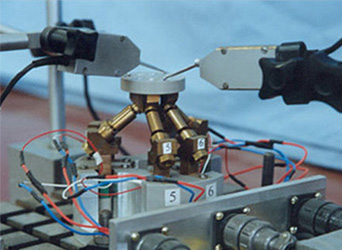
High precision micro-operational robot theory and system
- Introduction:
Inching robots are widely used in precision micro operational field (micron/nanometer in scale), with high precision and small volume, adapted in microelectronic and micromechanical assembling, precision medical operation, biological experiments operation, ultra precise machine processing, etc.
Content:- Multi-DOF parallel variant elastic robot system, kinematics and dynamics model and inching position control theory.
- High precision piezo electric servo driver and 6-DOF flexible hinge inching micro operational robot system.
- Positioning precision is lower than 0.1 micron, resolution is lower than 0.01 micron. The robot is composed by micro parallel elastic inching head, precision measurement and distributed nonlinear control system.
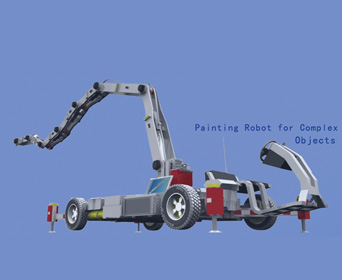
THSRO Intelligent Painting Robot
- THSRO Intelligent Painting Robot is an understudied
project. The robot is designed for complex inner surface painting. It is
consist of special designed Manipulator, Painting System, Safety Guaranteed
System, Measurement System, Transportation System, Control System and other
auxiliary equipments.
serial: TH-50
mechanism: Cartesian Type and Joint type
axle number: 14
action space: Abnormity space which length is up to 10m and diameter is less 4m
max load: 1.5kg
absolute positioning accuracy: +/- 3mm
repeat positioning accuracy: +/- 1.5mm
power: Max 9kw
Special Manipulation Robot System

TH900:
ECM (Electret condenser microphone) soldering robot- Introduction:
TH900 is designed to meet the special requirements for ECM-FPC soldering process. TH900 has successfully implemented a customized iron tip (Chinese Patent 200810106318.2), a position-force control algorithm, and an experiment-verified soldering procedure to generate high quality soldering joints with the average eligibility rate ≥95%.
Parameters:- SCARA robot with 5 DOF;
- Soldering speed: 900 pieces per hour;
System structure:
- PC(Linux 2.6.20)
- PMAC
- Teaching pendant
- CAN bus communication;

Stacker Robot
Humanoid Robots
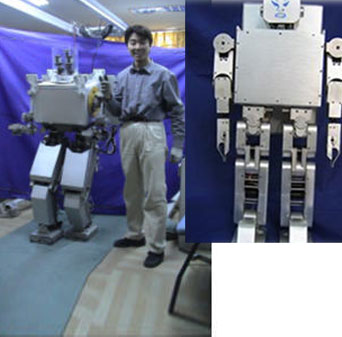
THBIP-I and THBIP-II Humanoid Robots
- Mission:
- Stand-up biped walking
- Active body balance
- Coordinated arm and leg motion
- A given artificial intelligence
Content:
- Biped stand-up walking theory
- Coordinated arm and leg motion theory
- Perspected information processing and synthesis
- Independent behavior generation principle
- Robot structure design
- Robot control and communication system
- Simulation and experiments
Humanoid biped soccer robot technology
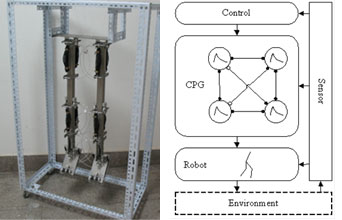
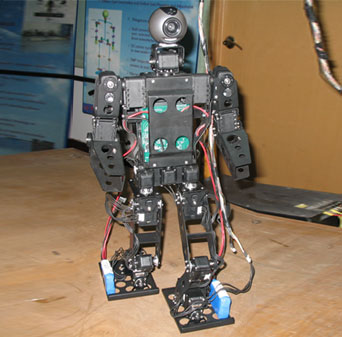
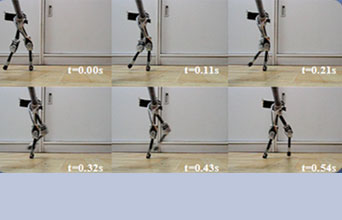
Bionic Biped Robot, THR-II
- THR-II aims to imitate human locomotion on both structure and control. THR-II has two legs, with totally 10 freedoms. The patella like mechanism is designed to prevent knee from over rotating. The artificial pneumatic muscles are used to actuate sagittal rotation of hip, knee, and ankle joints, while toe joints on sagittal plane and ankle joints on frontal plane are kept passive. The control of THR-II is based on CPG (Central Pattern Generator), sensor-reflex, and self-stabilization. PC/104 CPU module is used as central controller. A/D, D/A, I/O card are used to acquire sensor data. Potentiometers are fixed on hip, knee, and ankle joints to measure angles on real time. FSR (Force Sensing Resistor) are fixed on feet to detect impact on ground. Accelerometer and gyroscope are fixed on shank to measure posture of robot. The height of THR-II is 0.8m, and the weight is 5.5kg.
THRI Humanoid Robot
Special Mobile Robots

Conduit inspection robot technology
- Mission:
Velocity 1000m/h
Detection distance 1000m/time
Adaptive conduit diameter 140mm-160mmFeatures:
- The conduit robot adopts wheel carrier to realize high tractive force, high speed, easy steering, vertically walking and easy passing through bend tube of 90 degrees, adaptive to conduit diameter alteration.
- Composed by 3 or more uniform walking units. Each unit is composed by motor, deceleration drive structure, support system and walking system
- Deceleration system is composed by 1 worm couple, outputing high torque.
- Support system adopts scissors structure. Walking unit is compressed to the internal wall of conduit and the robot is drive to move forward or backword by friction force.
- Walking system of each unit includes 1 action wheel and 1 follower
Content:
- The moving carrier of conduit robot
- Design and experiment of conduit cleaning system

The electronic design for the highly function integration
Robotic System and Automation
Distributed Coordination Multi-robot Mobile System
-
- Flexible screen and touch screen
- Flexible solar battery and battery
- FPC and Nano-mechanical components
- Some sensors
- Blue-tooth
- Temperature and humidity
- Fingerprint identification sensor
- Olfactory sensor
- Radiant sensor
- Ultraviolet sensor
- Position sensors, pose sensors and acceleration sensor
- GPS
- Introduction:
- Multi-machine cooperated mobile method is applied.
- System unit is designed as reconstructable models, decreasing the cost of manufacturing and
- utilization.
- Active unit adopts single DOF structure, realizes the maximum extensive capacity of combined structure
- and kinematic function, avoids the redundancy of structure and function, reduces the system structure
- and control complexity.
- Distributed control realizable.
Content:
- Kinetic and structural recombination theory in non-structural environment
- Coordinated control theory in combined system units
- Communation protocol planning of system units and communication method realization
- Synthetic process method of internal and external environment information
- Distributed multi-robot motion planning
- System unit structure design
Synthetic kinetic function, including system breaks up and pass narrow space through, discreet supported movement on non-structural environment or rough land form.
- Introduction:
Intelligent Flexible Manufacturing System for Product
Research and Development- Introduction:
The intelligent flexible manufacturing system is an integrated computer control system in process industry. It makes the realization of integration and automation of production management and industrial control. This system has been used in the toothpaste trial-manufacture process for the R&D department of P&G Corp. Compared with the usual large-scale automated production lines, this system features with:- High degree of flexibility: Satisfy the requirements of small batch production for multiple recipes development.
- High precision: Meet the strict requirements of the quantity and ratio of raw materials.
- High degree of information and automation: Integration of production process, management and control.
DSP-FPGA Based Multi-Axis Motion Controller TH-300

