- Offer Profile
- SCHOOL OF MECHANICAL ENGINEERING: The School of Mechanical Engineering at the University of KwaZulu-Natal (Howard College Campus) consists of 9 academic staff members, 15 non-academic staff members, 431 undergraduates registered for the BScEng (Mech) degree, and 17 postgraduates registered for MScEng and PhD. At the beginning of 2008, 76 students graduated from the School of Mechanical Engineering with a BScEng (Mech) degree in April 2008.
Quality Control for Mass Customisation Manufacturing Shaniel Davrajh
- Quality control is a crucial process in the lifecycle
of a product. This process ensures production of acceptable parts, which
assists in sustaining customer loyalty through greater customer
satisfaction. Quality control may also be used for providing the necessary
feedback essential for process optimization and control. The disadvantage of
investing in a quality control process is that no value is added to a
product during this process, i.e. a manufacturer cannot explicitly increase
the profit per item by performing quality control operations on produced
parts. It is therefore crucial for manufacturers to minimize resource
expenditure during the quality control process.
Manufacturing paradigms have evolved from previously low production approaches of satisfying one customer at a time, to achieving economies of scale through mass production technology. Manufacturers then improved mass production operations by increasing the efficiency and reliability of the relevant dedicated systems. The current trend in consumer markets is that customers are becoming more diversified and difficult to satisfy. Customers are now demanding the choice of becoming more involved in various stages of product design. The quality of a product will therefore also be dictated by the customer. This diversification of consumer markets increases the difficulty for manufacturers to exploit niche markets. Previous methodologies adopted for mass production may no longer applicable due to varying customer requirements, and mass producers need to accommodate powerful and uncompromising customers. Conversely, enterprises that focus on pure customization need to consider higher volumes of production to increase competitiveness through more cost-effective products. The ability of a manufacturing system to mass produce custom parts can offer manufacturers the ability to maintain economies of scale whilst providing the flexibility required by individual customers. Quality control of mass produced custom parts becomes more significant due to the unique nature of these parts. The difficulty experienced when considering quality control of mass produced custom parts is that the quality requirements become more complex than standard parts. This increase in complexity of quality requirements is induced by system variations. These system variations can be classified into product and process variations. Product variations are initiated by varying product dimensions, level of customization, raw material, significant quality characteristics, product modules, and quality requirements, which may be determined or confirmed (if suggested by the manufacturer) by the customer. Process variations are caused by varying frequencies of inspection, production rates, process configurations, and sensing capabilities. These variations are decided by the manufacturer, based on varying customer requirements. In addition to system variations, there is an increase in the complexity of the sometimes unique reliability analyses, testing, and re-working of mass produced custom parts.
Manufacturing environments that consider mass producing custom products may incur single product lots that are unlikely to recur. Traditional quality control techniques such as statistical control charts, and Poka-Yoke devices are difficult to apply to these environments due to the frequent reconfiguration in both product and process. There is therefore a need to research quality control techniques that can be applied to mass production of customized products. This need is fuelled by the lack of technology to assess the reliability, product design, automated re-working feasibility, optimization of product quality and throughput, process configuration, frequency of inspection required, tracking of product quality, and product testing associated with these products. The research done with regards to inspection hardware required for these environments thus far is limited with regards to cost, functionality, and practicality. Inspection hardware for mass producing custom parts therefore requires further research. A methodology to map product quality, from the product design stages (including customer inputs), onto process configurations is also required. The contributions of this research lie in the fact that little emphasis, when compared to other manufacturing processes, has been placed on the quality control techniques required for mass production of custom products. No system exists to map the frequencies of inspection and process configurations required for mass producing custom products, from varying customer inputs. A system that is able to integrate both on-line and off-line quality control for mass producing custom products will be researched and developed. The hardware required for inspection for mass producing custom parts will also be researched and developed. Mobile Platform Architecture for Flexible Materials Handling Anthony Walker
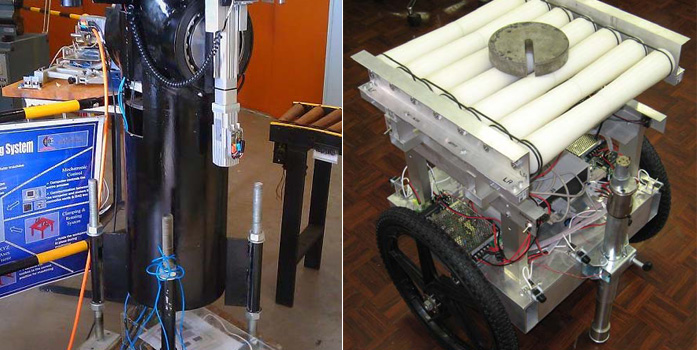
- The mass production of customised products requires
materials handling systems which are flexible enough to accommodate the
transportation of varying geometries, masses and volumes of materials. This
requires mobile platform architectures which can operate effectively in both
a singular context and during the cooperative transportation of larger loads
with irregular geometries. Multi-platform cooperation calls for a robust
inter-platform communication mechanism and networked operation. Research
into Flexible Materials Handling at MR2G has produced a mobile platform with
a mechanical architecture that allows for effective materials transportation
during single platform tasks and during multi-platform cooperative
transportation.
The platform architecture consists of a differential drive mobile base fitted with an articulated conveyor system which allows for the projection of lesser constrained kinematics onto the transported load. Holonomic movement of payloads with irregular geometries will be required in manufacturing environments with limited space. Each articulation on the conveyor is fitted with a quadrature encoder to allow for sensed articulations which can monitor the change in payload configuration during multiplatform cooperative material transportation. The mobile platform is accessible over a wireless network and uses a Robot Server namely Player as its Hardware Abstraction Layer (HAL). This allows for the development of generic control algorithms and standardised data fusion primitives. Plug-in drivers abstract the drive control system, articulated conveyor system and sonar sensors into high level network interfaces in the Player server. The platform has both proprioceptive and exteroceptive sensory infrastructures to allow for pose estimation and local obstacle avoidance. The mobile platform uses as its on board computer an Mini-ITX form factor motherboard with a VIA C7 processor and runs Fedora Core 7.

Urban Search and Rescue Robot Riaan Stopforth
- Robots are required for search and rescue purposes.
They should be able to go into concealed places and environments that fire
fighters and rescue personnel cannot gain access to. Three hundred forty
three firefighters died at the World Trade Center during the September 11
attacks in 2001. Rescuers often enter rooms that have unstable structures
yet there are no people to rescue. Sixty five of these rescuers died due to
searching confined spaces that flooded.
Robots could save lives of victims and be first responders. Rescue workers have about 48 hours to retrieve victims due to survival constraints. Many hours are often lost as rescuers who cannot enter a building due to unsafe conditions. These robots could also be used in mines for rescue purposes that often plague South African mining corporations.
Problems observed with USARs are the robot's traction systems malfunction; robots cannot withstand harsh conditions, limited wireless communication range in urban environment occurs and unreliable wireless video feedback is frequent. A robot is needed that will be able to withstand these harsh conditions and that will be able to overcome the limitations that past robots have had.
Research is being done on the design and development of a robot that will perform urban search and rescue. This will include suitable materials for the constructions and insulation of the robot. The different requirements that are needed on a USAR robot are investigated which involve video transmission, communication and robot control in these difficult environments.
Reconfigurable Manufacturing Systems Jared Padayachee
- Global economic competition, the rapid introduction of
new products to markets and the need for mass customization have highlighted
the inadequacies of present day manufacturing paradigms. The need for a
manufacturing system that is responsive to change has lead to the evolution
of Reconfigurable Manufacturing Systems (RMS). The RMS paradigm incorporates
features of Dedicated, Flexible, Cellular and Lean manufacturing systems;
while overcoming the inertia of these systems in accommodating technological
developments and the frequently changing demands of customers.
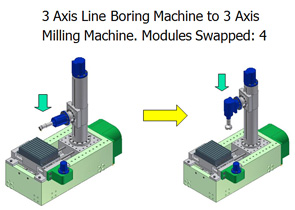
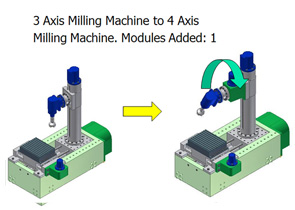
The focus of this research is on the development of a Modular Reconfigurable Machine (MRM); which is an enabling technology for RMSs. MRMs are modular in both their mechanical and electronic control architectures. The concept being researched is the development of a set of machine modules for the synthesis of a complete machine tool. These modules when assembled in varying configurations will produce machines with varying topologies, as best suited for the production of the required part family. A modular building block approach for the synthesis of machine tools promotes hardware reusability; this reduces investment costs in hardware and allows the modular components of a machine to be reassembled in varying configurations to meet changing production mix and volume characteristics.
The development of a fully modular machine will require the implementation of a modular Open Architecture Control (OAC) system. OAC overcomes the problem of inflexibility found in the proprietary automation of conventional CNC and dedicated machinery. The software and electronic control modules should possess generic plug and play capabilities to minimize machine reconfiguration and system ramp-up times. Modular control hardware and software architectures will facilitate the reconfiguration of machine hardware while allowing the controllers to be easily upgraded as new technologies and more efficient control algorithms are developed.
Autonomous Materials Handling Robot for Reconfigurable Manufacturing Systems Louwrens Butler
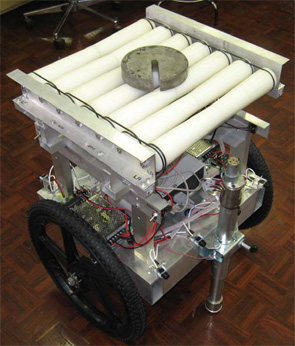
- There is a need for mobile robots in reconfigurable
manufacturing systems to reduce bottlenecks that occur in associated
materials handling systems. These bottlenecks can occur as a result of the
mass production of custom products. This project is focusing on researching,
designing, assembling, testing and validating a two-wheeled autonomous
materials handling robot for the purpose of reducing bottlenecks in a
reconfigurable manufacturing system. A Mechatronic engineering approach is
being used for the project (system integration). This approach is being used
to research and design a vehicle that will be dynamically and statically
stable while in operation. The figure shown is the fully assembled
prototype.
Autonomy is largely provided by means of an onboard computer that serves as a robot sever to which a system controller (typically a host computer) can subscribe to in order to convey commands. A novel navigation system is being researched and developed that will allow the vehicle to perform materials handling tasks necessary to reduce bottlenecks. A communication system will also be incorporated into the infrastructure of the vehicle. Performance analysis and testing will also be done in a reconfigurable production environment. This will involve vehicle scheduling and routing while performing materials handling tasks.
Calibration of a Multi-Functional Tool Incorporating Automatic Tool Changing for Reconfigurable Manufacturing Systems
James Collins- Reconfigurable Manufacturing Systems is concerned with
multi-machining and hence a variety of tools are needed to perform different
machining processes. This necessitates rapid tool changing to promote an
efficient and cost effective manufacturing process. Along with this, the
reconfiguration of the manufacturing equipment gives rise to the need for an
in-process calibration procedure to ensure machining accuracy and timely
part production. This project will research an automatic calibration method
for a modular tool changing unit.
Using the necessary sensors and control systems the tool changer will be easily integrated into a modular manufacturing system.
Optimum Part Production via Reconfigurable Computer Integrated Manufacturing Cells Nazmier Hassan
- Mass producing custom products requires a new type of
manufacturing environment. Current manufacturing environment do not possess
the flexibility required for mass producing custom products. Reconfigurable
manufacturing environments are still costly to implement. A solution whereby
Computer Integrated Manufacturing (CIM) cells can operate in a
reconfigurable manufacturing environment is proposed to facilitate the
process of mass producing custom products.
CIM cells possess manufacturing conditions such as modularity and open control architecture, controlled simultaneously by its software and hardware. It will operate within an integrated intelligent manufacturing system primarily through software control. This provides a standard software interface for integration into a control system, while providing reconfigurability of the system and its functionality in response to frequently changing product architectures and features. The software and
hardware will coordinate both low to high level activities. These activities range from planning and scheduling of production, mechanization of hardware, to synchronization of the cell components gained from error reports. The hardware components of the manufacturing system possess a standard method of physical interaction with each other.The reconfiguration and manufacturing functionality of CIM cells are categorized at a primary and secondary level which is determined from its process parameters. At its primary level, reconfiguration is of material flow paths while at its secondary level reconfiguration occurs due to the status of the hardware.
From an economic and production management perspective the reconfigurable CIM cells will provide the essential manufacturing requirements to provide rapid change. It will provide cost effectiveness, minimum product cycle time, reduced manufacturing lead time, rapid ramp up, flexibility, produce products of high quality and meet customer needs.
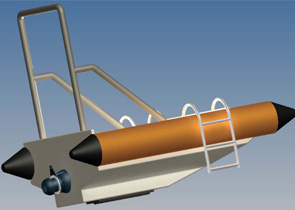
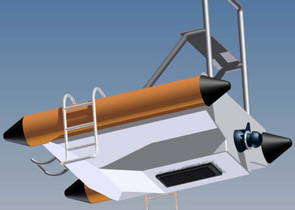
Autonomous Sea Craft for Deep Sea Rescue Operations Chiemela Onunka
- The study is focused on research into a suitable mechanical infrastructure and propulsion system that is capable of use in deep sea rescue operation. The use of different mathematical models and algorithms to express the integration of software technology and electronic architecture into a mechanical system is also a focus area. The study also has its focus in implementation of suitable sensor architecture and technologies for data fusion, motion planning and navigation of the autonomous sea craft.
Development of a Search & Rescue Unmanned Aerial Vehicle (UAV) Robot Yogi Naidoo
- Hovering robots, such as helicopters, can be used to
collect data in environments where it would be too dangerous for human
expedition. Search and rescue robots are being deployed more frequently to
help establish a connection with a victim in a crisis situation. These
robots can explore urban and industrial environments contaminated by
radiation as well as chemical or biological substances. UAVs are able to fly
directly to the location of concern without extensive assessment to the
disaster site. Therefore, these robots help overcome the limitations of the
response time of a search and rescue operation by overcoming obstacles such
as extremely rough rubble, flooding and fires.
The objective of this research is to develop a UAV with a high degree of manoeuvrability which can be used for search and rescue applications. The robot should be able to switch between autonomous and semi-autonomous control, as well as avoid obstacles in its flight path. This ensures that full attention is given to incoming data and surveillance footage.
Artificial Intelligent Systems for Co-operation of Swarm Robots in a Computer Integrated Manufacturing Environment
Roland Dixon- The two closely related topics of swarm intelligence and swarm robotics are relatively new and potentially powerful fields of research that originate from the study of biological colonies. These colonies are observed to be comprised of simple individual agents that work together to achieve a common goal. These decentralized, asynchronous systems result in an emergent complex and intelligent system that work efficiently to achieve the goals required to survive efficiently in their respective environments. This project serves the purpose of exploring the concepts associated with artificial intelligence, swarm intelligence, swarm robotics and designing unique applications in which these swarm robots will be well suited.