
- Offer Profile
Human-Robot Interaction Laboratory Work in the laboratory was begun in spring 2005 and the research here generally deals with topics including robot-assisted surgery, haptics, and interactive physical simulations. The common element in this work is that direct physical interaction is involved between human users and robotic devices.
Active Projects:
- Compact Teleoperated Robot System for Minimally Invasive Surgery
- Magnetic Levitation Systems for Human Interaction
Inactive Projects:
- Linkage for Locomotor Rehabilitation
- Active Stabilization Support Frame for Surgical Instruments
Instructional Robot Interface
Compact Laparoscopic Surgery Robot System
- We have developed a manipulator for laparoscopic
surgery. Its novel features are its compact size and low weight, so that it
is easy to set up and use without occupying any floor space or obstructing
access to the abdomen from any direction.
Characteristics of the current Prototypes:
- Easy to set up, portability, simple sterilization by autoclave, reduced cost, increased safety due to low inertia
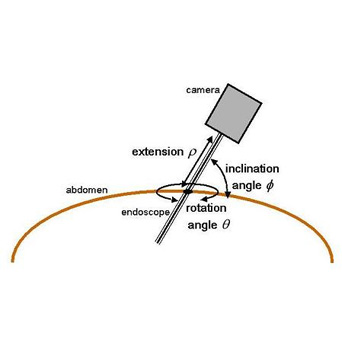
Principle of Compact Laparoscopic Surgery Robot
- Small modular robots clamped above abdomen of patient
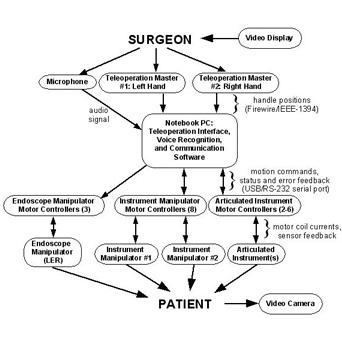
System Schematic of Compact Laparoscopic Surgery Robot
- Teleoperation masters and low-level motor controllers
coordinated by high-level controller on PC
Components of the Prototype:
- Teleoperation Masters
- Voice Command
- Control Software
- Motor Controller
- Feedback Sensors
- Endoscope Manipulator
- Instrument Manipulators
- Surgical Instruments
- Video Feedback
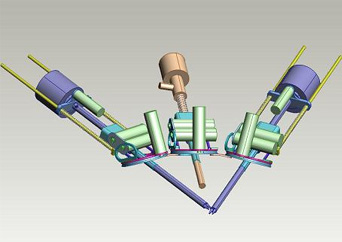
Design of Manipulator and Surgical Tools
- Modular endoscope and instrument manipulators used together for surgical models
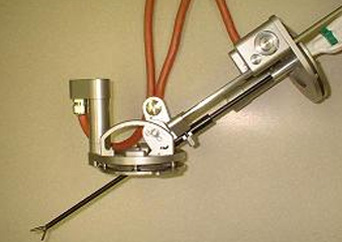
Compact Laparoscopic Surgery Instrument Manipulator
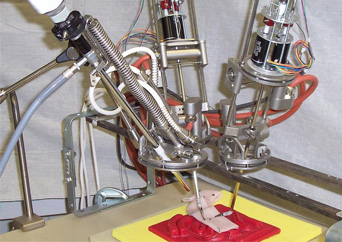
Endoscope manipulator and two instrument manipulators on frame clamped to table

Teleoperation Master Console (Phantom Haptic Devices):
- Sensors on linkage measure surgeon hand movements used to control surgical instrument manipulators in real time.
Magnetic Levitation for Haptic Interaction
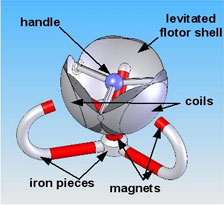
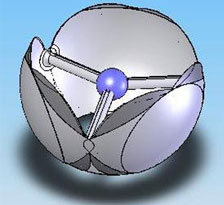
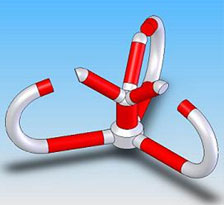
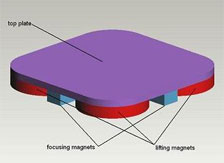
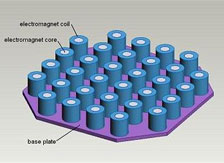
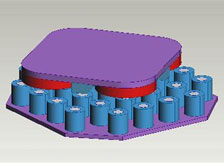
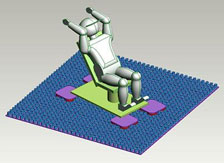
- Planar Repulsion Magnetic Levitation Device Design:
The base of this magnetic leviation device contains an array of cylindrical electromagnet coils which generate repulsive forces and torques to levitate and manipulate a platform containing 4 disk magnets. The basic module shown will be able to scale to larger area coil arrays with multiple levitated platforms to support a human user and simulate arbitrary vehicles, as shown below.
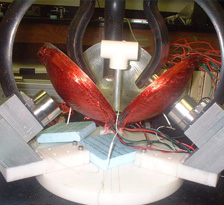
Levitating bowl with 2-layer straight wire coil pairs

Handle for haptic interaction
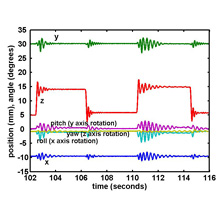
Vertical step response results
- The motion step response under simple PD control is currently underdamped due to the 1200 g levitated mass (reducible to 400-500 g by using aluminum coils), and the limited resolution and update rate of the motion tracking sensor.
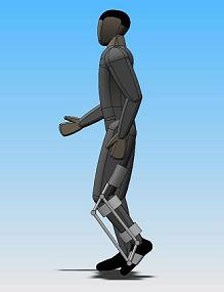
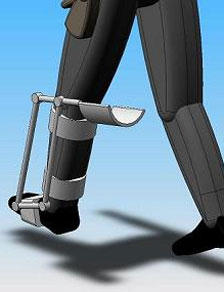
Linkage for Locomotor Rehabilitation
- We are developing a prototype linkage for use as an ankle-foot orthosis to prevent the foot-drop condition. The linkage is attached to the calf and foot of the patient and passively couples together the motion of the knee and ankle during locomotion. As the knee is bent at the beginning of the stride phase of a walking gait, a curved bar contacts the back of the thigh and the linkage mechanism produces a force to assist the flexion of the ankle at the initiation of the stride phase. An initial wearable prototype has been fabricated and is ready for initial testing on test subjects to demonstrate the feasibility of the concept and refine the design of the mechanism.

WWW Teleoperation Interface for Instructional Robot Arm
- A Microbot Teachmover II has recently been acquired by
the laboratory to be used for instructional purposes. We have developed an
Internet robot teleoperation system for use in education. In order to
facilitate the robot teleoperation for distant users, our Internet robot
teleoperation system as been developed based on Skype Internet telephony
protocols. By using the Skype API, the video, audio and data transmission
are readily programmed and realized.
This robot teleoperation system consists of a local robot server and distant clients. The server directly controls the robot motion according to the commands from a distant client, while the client provides the operation interface to users for distant robot operation. 
Microbot Teachmover II

Client

Server