Navigation : EXPO21XX > AUTOMATION 21XX >
H05: Universities and Research in Robotics
> National University of Singapore
National University of Singapore

Videos
Loading the player ...
- Offer Profile
- Social Robotics Laboratory (SRL) is dedicated in research and development in making social robots ubiquitous parts of our day to day lives and bridging across the physical and virtual space as well as the embodiment of complementary spaces. Social Robots are able to interact and integrate seamlessly with the virtual world and at the same time, they can be the physical manifestations of the virtual world. We are to work with distinguished individuals and leading research groups internationally to make social robots available for the betterment of human life, and social robotics a subject of creativity and imagination. The main research thrusts include social robotics for education, healthcare and entertainment.
Product Portfolio
Research/Projects


Control for Offshore Oil and Gas Platforms
- Recent years have seen the formation and growth of the
global deepwater offshore industry, which has been driven by increased
demand for oil and gas stemming from years of economic growth, reduction in
production of existing hydrocarbon fields, and depleting shallow-water
reserves. These factors have encouraged operators to invest billions
annually chasing this offshore frontier and the development of floating
production and subsea systems as solutions for deepwater hydrocarbon
extraction.
Currently, 15% of total offshore oil production is carried out in deep waters, and this proportion is expected to rise to 20% in the next few years. The harsher marine environment and need for subsea production systems in remote deepwater developments opens a set of challenges and opportunities for the control theorist and engineer.

Social Robots: Breathing Life into Machine
- This project aims to develop intelligent and socially
aware robots able to interact and communicate with humans, and even live
among humans. Robots will no longer just be industrial machines but
companions too. Possible duties include stay-at-home companions for the
elderly and medical robots.
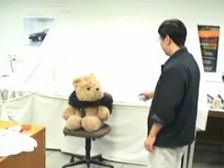
Interactive Robotic Pet
- In this project, we focus on the development of a few
selected modules, drawing inspiration from and mimicking human social
behaviors, to make robots sociable and to push towards effective
interactions between humans and robots. The modules we have developed
include the recognition of human expression, an expressive robotic face,
sound localization, touch reaction, wireless communications and
conversation.

GeNUS Humanoid
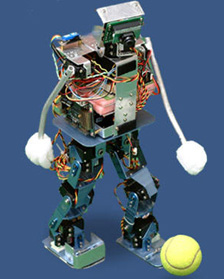
MaNUS Humanoid

Interactive Robot Usher (IRU)
Expressive Robot Face
Robot falling in love
- Lovotics = Love + Robotics
The Human & robot may fall in Love one day
Chat with Lovotic, The robot which is located in the National university of Singapore and may fall in love by artificial intelligence.

3D HEAD
- Talking heads are anthropomorphic representations of a
software agent used to facilitate interaction between humans and the agent.
They can be thought of as virtual humans capable of carrying on
conversations with humans by both understanding and producing facial
expressions and speech. The issues to be dealt with for the creating such
agents span two major areas of research namely animation and AI. With regard
to the design of conversational agents, the problems faced are similar to
the issues in the Natural Language Processing of AI. AIML, a
state-of-the-art technology which attempts to overcome these issues has been
used for the design of the brain of the agent developed in this project. It
implements a pattern-matching algorithm and gives the user a great amount of
functionality by offering tags which helps to make the agent seem context
aware and intelligent. Efficient visual presentation of this agent is made
possible by the use of superior facial deformation techniques and scripting
languages which provide the user with a high level view of the animations
that can be realized.

Facial Expression Recognition
- This is a real time facial expression recognition system.
Initially, a front view image of the tester's neutral face is captured. This
image is processed to detect the tester's face region, extract the eyebrows,
eyes, nose and mouth features. The features location are then mapped to the
real time video according to the video's resolution. Once the initialization
is completed, the tester can express his emotion freely. The feature points
can be predicted and tracked frame by frame using Kalman filter and Lucas-Kanade
optical flow method. The displacement and velocity of each feature points
are recorded at each frame. Once a expression is occur, the detection system
will choose the maximum value among all the normal dot products and make a
judgement displaced at the video. When one expression is over, the tester
can expression his following emotions or re-initial the system if any
tracker is lost.

Brain game
- In this project, we aim to develop a low cost, easy to
use, and accurate EEG monitoring system. Furthermore, the DIY EEG module
will be used in a Brain Computer Interface (BCI) to let people play computer
games by simply thinking.

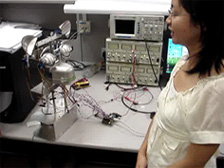
Mind Robotics
- Objective
Mind Robotics aim to develop a system which analyze and extract features from brain signals for the communication and control of robots. In a preliminary stage, we already designed a prototype of two channel EEG acquisition equipment with novel active electrodes and wireless communication module.