Navigation : EXPO21XX > AUTOMATION 21XX >
H05: Universities and Research in Robotics
> King Mongkut's University of Technology
King Mongkut's University of Technology

Videos
Loading the player ...
- Offer Profile
- Institute of FIeld roBOtics (FIBO) at the King Mongkut’s University of Technology Thonburi is intended for producing graduates and specialists in the field of robotics and automation with skills on designing, product development, research capabilities, and technology management. This will also influence academies, industries, global competition, and relevant aspects for developments on science and technology for Thailand.
Product Portfolio
General Information
Motivations:
Nowadays, Kingdom of Thailand needs developments of skills on sciences and technology in order to compete internationally. Human resources are another component for these developments, especially for a research purpose. These people will help for creating an innovation that can be in Thai industries, agricultures, and communities. Institute of FIeld roBOtics (FIBO) at the King Mongkut’s University of Technology Thonburi had realized on these developments and formulated a graduate curriculum that focuses on robotics and automation. FIBO Robotics and Automation (FRA) program helps to produce talented graduates with robotics foundations, engineering skills, especially on robotics and automation. Moreover, FRA alumni have a capability to carry on research and to implement knowledge related to robotics and automation that can influence developments on sciences and technology in Thailand. This curriculum also provides knowledge that can be used for strengthening Thai industries, supporting international competitions, and accommodating on Thai lifestyles. Moreover, this curriculum offers lessons on technology managements for utilizing resources and reducing environmental effects.History
- FIBO was first established as a Center of Operation for
FIeld RoBOtics Development at King Mongkut's University of Technology
Thonburi during the 7th Educational Development Plan in 1995. Since April
11, 2003, FIBO had been promoted to the Institute of FIeld RoBOtics under
purposes to
1. Be a center of excellence in robotics and technology management that is capable to compete with international research institutes in the world.
2. Produce graduates and professionals in the field of robotics and technology management.
3. Contribute knowledge of robotics and technology management to public. Philosophy Vision and Mission
- Philosophy:
- Fundamental belief:
- Respect and facilitate individuals, especially those who exhibit non-conventionally disruptive creativity, balancing personal excitement and societal success.
- Principle
- Effectiveness converts human intelligence, imagination and knowledge to tangible results.
Vision:
Be the center of excellence in robotics and technology management of Thailand with the goal to substantially resolve national problems.
Mission:- Create education and basic research.
- Apply applied research and industry-oriented research.
- Contribute public service.
Code of Conduct
- RESPONSIBILITY FIBO - PUBLIC
- We get the right things done right, although there is no support and/or the whole ground is against FIBO.
- We do not economize and compromise on quality.
- We value the failures and honor the successes. Every noble work is at first impossible and dry.
- We concern for social responsibility, and put in our efforts and knowledge to contribute to society and communities.
RESPECT FIBO - FIBO- We enable harmonious flow among comforts, achievement and dreams of all people involving within FIBO.
- We treat our colleagues, students and others with respect, dignity, fairness and courtesy.
- We provide a safe and productive working and learning environment for our people.
- We perform our duties with honesty, integrity, impartiality and objectively.
RIGHTS FIBO - INDIVIDUAL- We try to balance work and private life.
- We invest in the ongoing enhancement of our skills and abilities.
- We respect and facilitate individuals, especially those who exhibit non-conventionally disruptive creativity, balancing personal excitement and societal success.
- We believe in the value of individual as FIBO owes its growth and prosperity to the contribution of everyone at FIBO.
Outstanding Research Projects
- FIBO’s research results are outstanding for academic purposes and its social contribution. They help the public to realize the value of robotics and automation for human.

Reception Robot - NAMO

Reception Robot - OHM

Reception Robot - (SSH)

Reception Robot - (NSM)

Water Gate Controls Using Teleoperations

Unmanned Aerial Vehicle (UAV)
Remotely Controlled Boat for 3D Waterway Mapping

Industrial Robot
Shoot Ball (NSM)

Industrial Robot Play OX Game (NSM)

Humanoid Robot (NSM)
Rescue Robot (NSM)

Variable-Damper Knee Prosthesis

Sensible TAB

Humanoid Somjuk
Humanoid Kid Zise
Multi-touch Table Interface

Intelligent Vehicle
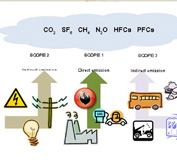
Carbon Foot Print

Snake Robot 1
Snake Robot 2