Navigation : EXPO21XX > AUTOMATION 21XX >
H05: Universities and Research in Robotics
> MIT. Dept of EE & Computer Science
MIT. Dept of EE & Computer Science

Videos
Loading the player ...
- Offer Profile
- The goal of our research is to build machines which exploit their natural dynamics to achieve extraordinary agility and efficiency. We believe that this challenge involves a tight coupling between mechanical design and underactuated nonlinear control, and that tools from machine learning and optimal control can be used to produce this coupling when classical control techniques fail. Our projects include minimally-actuated dynamic walking on moderate terrain, quadrupedal locomotion on extreme terrain, fixed-wing acrobatics, flapping-winged flight, and feedback control for fluid dynamics.
Product Portfolio
Locomotion Group Paper and Multimedia News
Optimization-based Locomotion Planning, Estimation, and Control Design for the {A}tlas Humanoid Robot
-
by Scott Kuindersma and Robin Deits and Maurice Fallon and Andr\'{e}s Valenzuela and Hongkai Dai and Frank Permenter and Twan Koolen and Pat Marion and Russ Tedrake
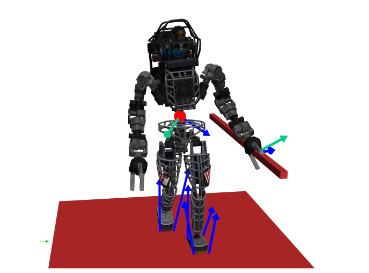
This paper describes a collection of optimization algorithms for achieving dynamic planning, control, and state estimation for a bipedal robot designed to operate reliably in complex environments. To make challenging locomotion tasks tractable, we describe several novel applications of convex, mixed-integer, and sparse nonlinear optimization to problems ranging from footstep placement to whole-body planning and control. We also present a state estimator formulation that, when combined with our walking controller, permits highly precise execution of extended walking plans over non-flat terrain. We describe our complete system integration and experiments carried out on Atlas, a full-size hydraulic humanoid robot designed by Boston Dynamics.
Whole-body Motion Planning with Centroidal Dynamics and Full Kinematics
-
by Hongkai Dai and Andr\'es Valenzuela and Russ Tedrake
To plan dynamic, whole-body motions for robots, one conventionally faces the choice between a complex, full-body dynamic model containing every link and actuator of the robot, or a highly simplified model of the robot as a point mass. In this paper we explore a powerful middle ground between these extremes. We exploit the fact that while the full dynamics of humanoid robots are complicated, their centroidal dynamics (the evolution of the angular momentum and the center of mass (COM) position) are much simpler. By treating the dynamics of the robot in centroidal form and directly optimizing the joint trajectories for the actuated degrees of freedom, we arrive at a method that enjoys simpler dynamics, while still having the expressiveness required to handle kinematic constraints such as collision avoidance or reaching to a target. We further require that the robot's COM and angular momentum as computed from the joint trajectories match those given by the centroidal dynamics. This ensures that the dynamics considered by our optimization are equivalent to the full dynamics of the robot, provided that the robot's actuators can supply sufficient torque. We demonstrate that this algorithm is capable of generating highly-dynamic motion plans with examples of a humanoid robot negotiating obstacle course elements and gait optimization for a quadrupedal robot. Additionally, we show that we can plan without pre-specifying the contact sequence by exploiting the complementarity conditions between contact forces and contact distance.
Efficient Mixed-Integer Planning for {UAVs} in Cluttered Environments
-
by Robin Deits and Russ Tedrake
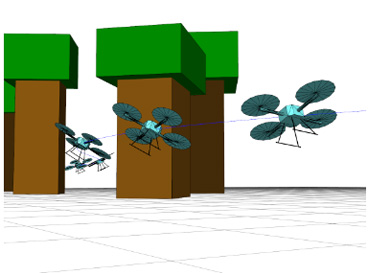
We present a new approach to the design of smooth trajectories for quadrotor unmanned aerial vehicles ({UAVs}), which are free of collisions with obstacles along their entire length. To avoid the non-convex constraints normally required for obstacle-avoidance, we perform a mixed-integer optimization in which polynomial trajectories are assigned to convex regions which are known to be obstacle-free. Prior approaches have used the faces of the obstacles themselves to define these convex regions. We instead use {IRIS}, a recently developed technique for greedy convex segmentation, to pre-compute convex regions of safe space. This results in a substantially reduced number of integer variables, which improves the speed with which the optimization can be solved to its global optimum, even for tens or hundreds of obstacle faces. In addition, prior approaches have typically enforced obstacle avoidance at a finite set of sample or knot points. We introduce a technique based on sums-of-squares ({SOS}) programming that allows us to ensure that the entire piecewise polynomial trajectory is free of collisions using convex constraints. We demonstrate this technique in 2D and in 3D using a dynamical model in the Drake toolbox for {MATLAB}.
Pushbroom Stereo for High-Speed Navigation in Cluttered Environments
-
by Andrew J. Barry and Russ Tedrake
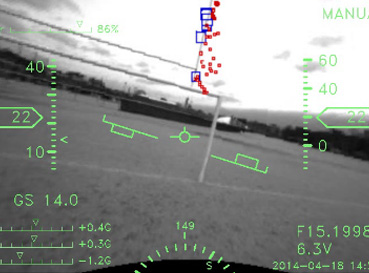
We present a novel stereo vision algorithm that is capable of obstacle detection on a mobile ARM processor at 120 frames per second. Our system performs a subset of standard block-matching stereo processing, searching only for obstacles at a single depth. By using an onboard IMU and state-estimator, we can recover the position of obstacles at all other depths, building and updating a local depth-map at framerate. Here, we describe both the algorithm and our implementation on a high-speed, small UAV, flying at over 20 MPH (9 m/s) close to obstacles. The system requires no external sensing or computation and is, to the best of our knowledge, the first high-framerate stereo detection system running onboard a small UAV.
Stability analysis and control of rigid body systems with impacts and friction
-
by Michael Posa and Mark Tobenkin and Russ Tedrake
Many critical tasks in robotics, such as locomotion or manipulation, involve collisions between a rigid body and the environment or between multiple bodies. Sums-of-squares (SOS) based methods for numerical computation of Lyapunov certificates are a powerful tool for analyzing the stability of continuous nonlinear systems, and can additionally be used to automatically synthesize stabilizing feedback controllers. Here, we present a method for applying sums-of-squares verification to rigid bodies with Coulomb friction undergoing discontinuous, inelastic impact events. The proposed algorithm explicitly generates Lyapunov certificates for stability, positive invariance, and reachability over admissible (non-penetrating) states and contact forces. We leverage the complementarity formulation of contact, which naturally generates the semialgebraic constraints that define this admissible region. The approach is demonstrated on multiple robotics examples, including simple models of a walking robot, a perching aircraft, and control design of a balancing robot.