
- Offer Profile
- Mechatronics, Robotics &
Control Laboratory
The Mechatronics, Robotics & Control Laboratory has developed some of the world’s most unique mechatronics and robotic systems including various mobile robots, advanced sensors and actuators, state-of-art control prototyping systems including dSpace, MatLab, and LabView.
Mobile and Bionic Robots
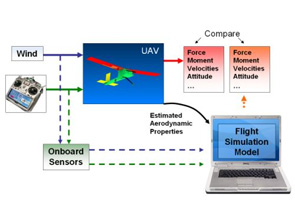
Development of Low-Cost UAV Systems for Environmental Monitoring & Management
- In collaboration with Geospatial Research Centre (NZ)
Ltd.
Project Goals
• Develop a plug and play position and orientation solution potentially including GPS, INS and imagery to geo-reference, in real time, a suite of environmental monitoring sensors and enable the generation of 3D features /orthophotos / terrain models etc. In addition to the sensor integration and data analysis tasks, a number of key questions are currently unanswered in terms of the technology (eg can imagery be used to compensate for (replace?) inertial technology?) and the application (eg what performance as a an environmental survey / monitoring tool is possible from a light-weight, low-cost model aircraft compared to existing manned systems?).
• Low cost UAV autopilots do not by themselves provide the integrity required for safe operations in the ‘real world’; a human must always be ‘in the loop’. What is the best way of providing flight information to the pilot? (Head Up Display, sound, etc); and can such a system be used to help less highly trained pilots fly UAVs?; do different methods of presenting the information give different results / alter the workload?; What is the best solution to enable the efficient monitoring / modelling of a particular environment (eg forest, farmland, offshore, volcano, etc)?
• Develop, test and analyse a combination of imaging / scanning sensors to gain more accurate and timely data about the real time flight environment and conditions. Explore the issues associated with intelligent and adaptive flight control to enable the UAV to make control decisions, respond in real time to changes in operating conditions (e.g. strong wind, storm, etc.) and the task(s) it is required to undertake at any one time.

Drive, Navigation and Sensor Network for Unmanned Underwater Vehicles
- UUVs have widespread undersea applications spanning over
oceanographic exploration, environmental monitoring, surveying, undersea
operations, and military mission. The primary focus of the project is on
design and construction of the underwater robot and buoyancy control,
propelling and navigation. The project goals are:
- Waterproofing mechanical/materials design, including linkages and sealants
- Drive technologies to control rise, descending of the robot
- Sensors including sonar & vision, autonomous navigation
- Fail safes that raise robot to surface upon detection of any faults
- Sensor network and communication
GPS-Guided Wheeld Robotic Systems for Outdoor Applications
- Mobile robots are the focus of a great deal or current
research and almost every major university has one or more labs that focus
on mobile robot research. In general, mobile robots can be classified into
four categories, namely, wheeled robot; legged robots resembling humans,
animals & insects; unmanned aerial vehicles (UAVs); autonomous underwater
vehicle (AUV). This project focuses on development of wheeled robotic
systems which are able to autonomously navigate in outdoor environments. The
project goals are:
- GPS – based autonomous navigation
- Improved path planning with gyroscope
- Obstacle avoidance with additional sensors like ultrasonic
- Safety mechanism with proximity and impact sensors
- Human-in-loop control via on-board vision

Climbing Robots
- It is a challenge for an autonomous mobile robot to climb
a vertical wall primarily due to requirements for agile locomotion, and high
manoeuvrability as well as robust and efficient attachment and detachment.
Such robots offer immense potential to automate tasks which are currently
accomplished manually, affording an extra measure of human safety, often in
a more cost effective manner. The project focuses on the locomotion and
attachment mechanisms. The following highlights the areas of research and
development:
- Attachment mechanism & control
- Locomotion and actuation design
- Adhesion force and manoeuvrability
- Robot trajectory control to avoid obstacles
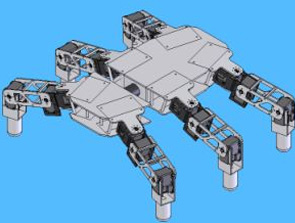
Walking Machines
- The aim of this thesis is to investigate the level of
mobility achievable by construction of a hexapod robot based on adapted
biological principles. The focus of the system will be in the implementation
of the embedded electrical system and control processes required to achieve
high levels of mobility. The research issues to be looked into include:
- Modular design of cockroach-inspired robots
- Novel mechanism for smooth motion and jumping
- Kinematics and dynamics of parallel machines
- Contact sensing and information processing
- Complex coordination motion control
Flea-like Jumping robots
- Biomimetic robots have recently received increasing
attention, as people try to learn from nature in which exist amazing and
uniquely evolved mechanisms shown by very species. Fleas, as such one
example, are best jumper of all known animals in the world, considering
their body size. It can jump about 150 to 200 times its own body length. In
this project, we aim to model, simulate and prototype a flea-like jumping
robot. The project includes:
- Body (legs) structure anatomy of cockroach, by SEM/TEM;
- Jumping patterns characterized by computer vision (high-speed camera required);
- Jumping mechanism modeling, simulation, and verification;
- Jumping robot design, model, simulate and prototype;
- Data collection for experiments.
Assistive Devices
Dynamic Stability Control of Front Wheel Drive Wheelchairs using Solid StateSensors
- In collaboration with Dynamic Controls Ltd. Sponsored by
FRST
Electrically powered front wheel drive wheelchairs are the ideal because they are the most manoeuvrable in tight locations, the seating position is better, it is easier to position one-self when approaching tables and desks, and they have the best curb climbing ability. Unfortunately Front wheel drive wheelchairs suffer from an inherent over-steer instability due to their geometry. This instability is further exacerbated by the typical user’s limited coordination. This research project aims to:- Develop a reliable wireless control for an existing front wheel drive wheelchair test-bed which contains solid state sensors, for experimental and validation purposes.
- Validate an existing model of a front wheel drive wheelchair and expand the model as necessary.
- Utilise the model to design a dynamic feed back control using the test-bed to validate the controller design.
Artificial Muscle for Assistance and Resistance
- The rising cost of medical treatment and the rapidly
aging world population has necessitated the advent of cheaper alternative
methods for rehabilitation therapy and assistive technology. The advancement
of robotic technology has brought about the possibility of robotic
alternative to the above mentioned concerns. These alternative robotic
orthotic and assistive devices could bridge the current treatment gap and
provide better assistive orthosis.
The project aims to design and develop an intelligent rehabilitative/assistive orthotic device for knee rehabilitation. The device is intended to aid stroke victims and also those with limited mobility due to weak knee muscles. The device will work on the ‘assist as needed’ principle. This means that it will support and aid the natural movements of the user rather than force it. The adaptive resistance feature can then be used to strengthen the leg muscles once the knee is able to move through the range of motion (ROM) unaided. The control signal for the device will ultimately be derived from the user’s own surface electromyography (sEMG) signal. The proposed device should be low cost and mobile. These features will enable the user to utilize the device at home to compensate for the limited contact time with a professional physiotherapist. The ultimate goal of the project is to develop a mobile assistive orthotic device which a user can continuously wear in the event that full strength to the leg muscles cannot be regained. Therefore the device could also serve as a substitute/complement to the human leg muscles.
Human, Robot Collaboration Systems
- In collaboration with HITLab
Making human-robot collaboration natural and efficient is crucial for effective human-robot collaboration. In particular, grounding, situational awareness, a common frame of reference and spatial referencing are vital in effective communication and collaboration. Augmented Reality (AR), the overlaying of computer graphics onto the real worldview, can provide the necessary means for a human-robotic system to fulfil these requirements for effective collaboration. This project covers:- Human-robot interaction and augmented reality
- The potential avenues for creating natural human-robot collaboration through spatial dialogue utilizing AR
- Holistic architectural design for human-robot collaboration and implementation of the methodology.
- Applying the developed techniques to autonomous robotic systems

Assistive Device for Rehabilitation
- In collaboration with Industrial Research Limited
(http://www.irl.cri.nz/)
Spinal Cord Injury patients undergo multiple stages of physiotherapy, starting from when the patient has little strength and exercises focus on the redevelopment of the patient’s range of motion and moving on to weight based exercises which develop the patient’s strength so that they can gain independence. Currently much feedback for the physiotherapist relies on the patient’s ability to report improvements, which is dependent on their understanding of the treatment. The therapeutic exercises themselves usually require assistance to setup and the exercises are lengthy and repetitive. Each of these issues has potential to be improved with technology.
This project targets the first stage of physiotherapy for C5 and C6 Spinal Cord Injury patients. These patients typically have lost the use of their hands, wrists and elbow extension. An exercise performed by these patients to develop arm strength is a repetitive horizontal sweep of the maximum range of motion of their arm. This motion is repeated continuously for several hours a day. The current equipment used in this exercise is a cord attached to a comfortable glove which supports the arm in a horizontal plane. The setup of this exercise requires assistance from the physiotherapist.
Bio-Instrumentation and Bio-Manufacturing

Low Cost 3D Printer for Desktop Manufacturing of Bio-material Scaffolds
- In collaboration with Centre for Bioengineering
The development of low cost, desktop, 3D Printing devices is a rapidly growing field. One major application is in the biomedical industry in the development of porous biomaterial implants or scaffolds used replace damaged human tissues such as bone, skin and cartilage (e.g. Tissue Engineering). Using a low cost approach compared to large commercial 3D Printing and Rapid Manufacturing machines, the aim is to produce a desktop device capable of “printing” complex 3D objects directly from CAD/CAM models. It will have to produce scaffolds with highly accurate features (e.g. <50 µm) and be flexible enough to allow printing in a range of different biomaterials (e.g. varying . The device will combine a printing head or nozzle attached to an accurate 3-axis (x-y-z) table, and incorporate software to drive layer-by-layer printing paths directly 3D from CAD/CAM models.Project Goals:
- Develop dispensing head that would allow the dispensing of materials like ABS and metal slurries.
- Develop heat-assisted technique to print thermoplastic biomaterials
- Develop multiple interchangeable printing heads to print different materials simultaneously.
- Develop techniques to print living cells suspended in hydrogel biomaterials (i.e. direct cell printing for tissue engineering applications). Eventual system and components will need to operate under sterile conditions and printing process must not adversely harm viability of cells.
- Develop/adapt driver software to allow printing path to be generated from CAD model and allow customisation of printing path for a given print layer (e.g. 0º-90º laydown pattern versus 0º-45º).
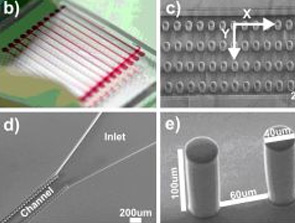
Biomanipulation with microrobotics and haptics
- In collaboration with The MacDiarmid Institute for
Advanced Materials and Nanotechnology
Micro-nano-robots with high positioning accuracy (at the scale of nanometers) and bioMEMS/NEMS devices with small size (at the scale of micrometers to centimeters) are widely used to manipulate micron-sized objects such as biological cells. They largely facilitate high-throughput investigation and allow better understanding of cell migration, cell proliferation, cell signaling pathway, cell biomechanics, and intercellular/intracellular interaction. With their unparallel capabilities of manipulating cells with size down to 10 nm level, micro-nano-robotic systems and bioMEMS/NEMS devices have been receiving increasingly remarkable attention. Recently, we have developed a fully automated zebrafish embryo injection system, semi-automated adherent cell injection system, and a PDMS elastic device for cell and C. elegans mechanics characterization. This project includes:
- Development of MEMS mechanics sensors
- Microfuidic channels for lab-on-chip applications
- Microrobotic manipulation modelling and control
- Haptics modelling and control
Instrumentation, Control, and Automation
Energy Harvesting for Wireless Instrumentation
- In collaboration with Commtest Instruments and NZi3,
Funded by FRST
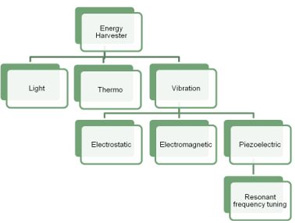
Energy harvesting, sometimes referred as energy scavenging, is a process of converting ambient energy sources such as light, heat, vibration, and RF energy into usable electrical energy to provide power for electric devices. Recent years, many commercial sectors have shown considerable interest on implementing energy harvesting technologies on wireless sensors used for structural and machine condition monitoring. The primary motivations are to eliminate the maintenance costs, and to permit permanent installation of wireless sensors in inaccessible locations.
In general, an energy harvesting system consists of three key components - energy generator, power conditioning circuitry and energy storage reservoirs. Energy generator is essentially a transducer that converts mechanical energy into electrical energy. As the nature of all energy harvesting methods, electrical energy harvested from the generator is always irregular and/or intermittent. To make this a usable energy source, a power conditioning circuit is required to regulate the power to a suitable voltage and current level. Sensors used energy harvesting technology as the sole power source are unlikely able to operate continuously. They operate at low duty cycles, hence energy storage elements are used imperatively to accumulate the harvested energy while the sensor is in sleep mode.
The ultimate goal of the research is to design an energy harvesting system to either fully power or compliment the battery power source of wireless sensor, and therefore to make the sensor maintenance free. Not only the energy harvesting system has to meet the energy demand, but also it has to be physically robust enough for survival in harsh environments where the wireless sensors are typically used. The final solution of the energy harvesting system design has to be practical in terms of manufacturability and costs. The production cost per unit is limited within 50 US dollars at 1000 quantity.
Wireless Sensor Network for Real-Time Device Control
- In collaboration with Dynamic Controls Ltd, and
NZi3, funded by FRSTWireless technology is an emerging technology for monitoring and control of processes and machines. It offers significant advantages including the significant reduction in wiring, plug-and-play, portability, and robustness. However the use of wireless in a real time control environment is new and still has many problems to overcome. This research programme will look into research issues including:
- Protocol
- Architecture
- Wireless media
- Development platform
- System implementation and evaluation

Underwater echo and source location
- In collaboration with the Acoustics Research Group, ECE.
The existing sonar based in the department of Electrical and Computer Engineering is a highly evolved complex underwater vehicle (UV) with sensors, navigation systems as well as data handling, and storage abilities, all contained in a housing capable of resisting underwater pressures to a depth of 100m. Along with the gross location in some world-coordinate frame (latitude, longitude and depth), there is a need for a micronavigation system that estimates the UV’s departure from the mean path down to millimeters as well as attitude variation from the mean heading.An offshoot of this research is the development of a disposable buoy used in groups of three or more intended to locate the position and dept of sperm whale off Kaikoura.

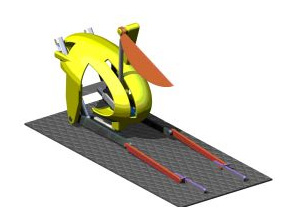
Stirling Engine Electric Power Generation Programme
- The programme as a whole aims to develop a user-friendly
computer tool for heat engine design and produce a set of associated
Stirling-cycle type heat engines primarily for use in electric power
generation. The fundamental purpose of the programme is to investigate the
feasibility of utilising low-grade, low environmental impact, thermal
sources for the generation of power.
Owing to the majority of geothermal energy resource in New Zealand not currently being applied to any useful purpose, a worthwhile exercise is to investigate whether some form of technology could be utilised for practically converting low-grade heat sources (sub-60 0C) into electrical power. Other low temperature differentials can be generated through solar and ocean thermal gradients, and bio-decomposition. Low-temperature differential thermodynamic cycles are bound, by physical laws, to be low-efficiency and one of the most practical methods of extracting power from low-temperature differential systems is by using Stirling-cycle based heat engines.
As an example, a solar-powered low temperature differential Stirling engine was demonstrated at the 2004 National Fieldays, Mystery Creek, Hamilton. The engine directly powered a small electric fence energiser. The system achieved two awards at this event; Bronze Award for Best Example of Renewable Energy, and Prototype Merit Award.
Process Automation
- The group is also actively involved in automation of
manufacturing processes including materials removal, welding, inspection,
etc. Research issues to be addressed:
- Novel actuation
- Sensors and data fusion
- Process modelling
- Real-time application of machine vision
- Adaptive control
- System integration
Structure Health Monitoring
- Structural health monitoring (SHM) is used to detect a
change in the condition of a structure particularly after a damaging input.
SHM can provide valuable data on structural safety for optimized response
and recovery planning after a major damaging event. It requires devices to
measure the response, as well as procedures to process the data received
into meaningful information. Data processing is often carried out because
the signal received is not the signal desired. The techniques such as
eigenvalue realization algorithm (ERA), wavelet analysis, adaptive Kalman
filter, H∞ filter, or least mean squares (LMS) based algorithm are commonly
used to determine parameters such as stiffness, fundamental periods, mode
shapes, damping, displacement, etc. from a time series of accelerations,
velocities, or some other quantities collected from different parts of the
structure.
The proposed research aims to develop a novel structural health monitoring technique for many applications based on processing captured images from a low-cost computer vision system for low-noise high-frequency displacement measurement (10-100 Hz, and noise level less than 15%). The algorithm uses measured accelerations of the monitored structure using conventional accelerometers to correct errors resulted in numerical calculus to find velocity and acceleration. The method will be computationally low intensive with low sensitivity to noise yielding a fast and robust SHM method for real-time applications.