Navigation : EXPO21XX > AUTOMATION 21XX >
H05: Universities and Research in Robotics
> University of Patras
University of Patras

Videos
Loading the player ...
- Offer Profile
- Research Interests:
- Robotics Control
- Computer-Aided Design
- Computer Graphics
- Artificial Intelligence and
- Autonomous Robots
- Artificial Intelligence in Design and Control
Product Portfolio
Reconfigurable Robot


Swarms

Mobile Robots


Manipulators






Fabric handling



Further Projects
H.O.M.E.R. - Handling of non-rigid materials with robots
- Four Universities and two industrial partners are
involved in this project (U.W.C., U.R., T.U.B., U.P., Fazan, Image).
Development of an Expert System in designing of grippers for handling non-rigid materials.
The main aim of this research is to provide users of robots with a systematic approach for the design of grippers for handling non-rigid materials. The expert system will be implemented in a knowledge-based system called HOMER.
The objectives of the research are:- To address specific non-rigid materials handling tasks which are difficult to automate and propose engineering solutions. The tasks will be specified by industrial partners.
- To develop an expert system for the design of grippers for handling non-rigid materials.
- To develop new grasping techniques for non-rigid materials.
- To improve current gripper design techniques specifically for the handling of non-rigid materials.
- To verify the developed knowledge-based system at the industrial partners’ site to prove its applicability and adaptability in real-world manufacturing environments.
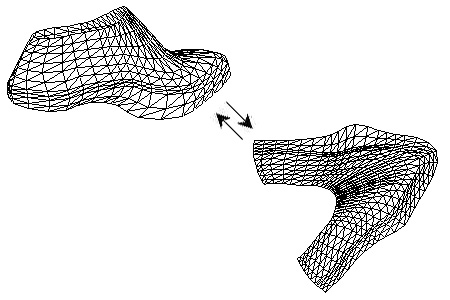
Design of plane developments of arbitrary curved surfaces. Application in CAD
(PENED 91 ED 482)- The aim of this research project is to develop methods
for the automatic generation of plane patterns of doubly curved surfaces.
Two methods have been developed during this project. The first one takes into consideration the elasticity of the surface material and the second one takes into account only the geometry of the doubly curved surface. Both methods require a proper triangulation of the original surface.
ROBAS under Copernicus Frame
- The Robotics Group of the University of Patras is
interested in the following three tasks:
- Development of a Knowledge-based System for the generation of assembly strategies.
- Simulation of robot cells for assembly of a valve produced by Zita Ltd.
- Development of a Hybrid Force/Position Controller for the implementation of assembly strategies.
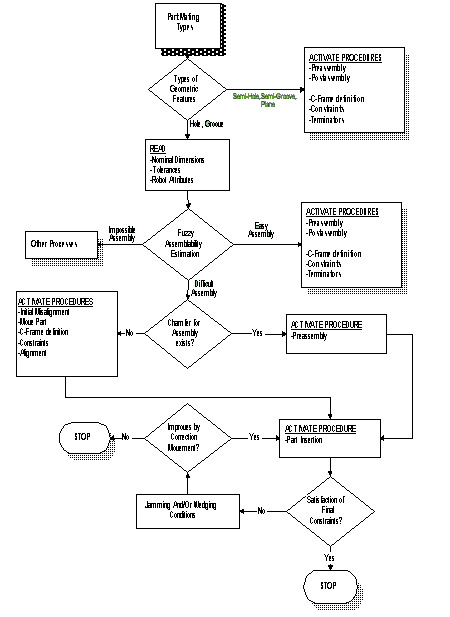
Knowledge Based System
- The knowledge-based system accepts as input IGES files where the parts are containing geometrical data for the parts to be assembled.
- The parts are classified according to their Geometric Features.
- The parts for each assembly task are classified as either moving or stationary.
- The C-Frames is defined on the moving part.
- The artificial constraints of each assembly subtask are formulated according to the contact case between the moving and the stationary part.
A special algorithm for the identification of the contact case is developed. This algorithm inputs the signal from the force sensor. In addition, a fuzzy decision system has been developed in order to reason about the feasibility of the assembly with respect to the tolerances between the two parts and the robot repeatability error.
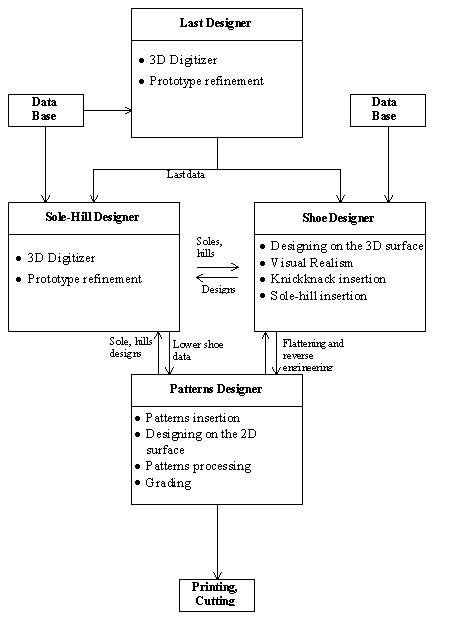
Development of an Integrated Software Package for Designing and Manufacturing Footwear Throughout a CAD/CAM System (EL.KE.DE. 97)
- The objective of this project is to develop an integrated
software package to automate a large number of issues concerning the
designing and manufacturing of footwear. Some of the programs capabilities
include the digitization of the three-dimensional shoe lasts, the generation
of the shoe design on the three-dimensional surface of the shoe last or on
its two-dimensional planar development, the designing of soles and hills,
the processing of planar patterns, and the generation of various sizes
(grading). Furthermore, the program will be able to connect to a cutting
machine in order to cut the shoe patterns. The following diagram illustrates
some of the programs functionality.
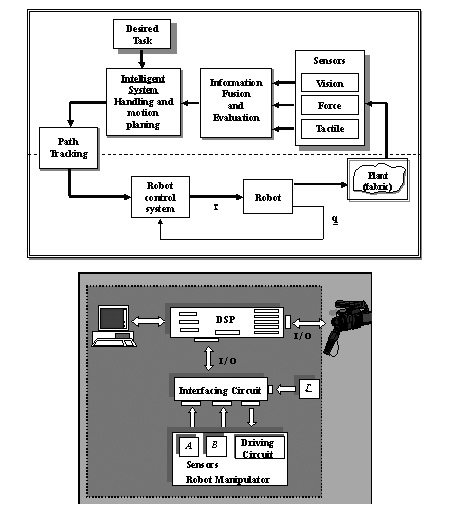
Handling of non-rigid materials with robots. Application in robotic sewing
- The main aim of this project is to develop new
intelligent methods for the robotic handling of non-rigid materials such as
fabrics. The project is focused in the automated sewing of fabrics using a
multi-sensor fusion system as well as in the quality control of the fabrics
using machine vision. The innovative approaches will be based on Artificial
Intelligent methods: Fuzzy Logic and Neural Networks.
The objectives:
- To train new researchers in the technology of automated handling of non-rigid materials and the technology of the cloth making industry.
- To develop intelligent algorithms for fabric handling strategies and for fabric quality control.
- To develop experimental intelligent devices, for separating-handling-translating-inspecting fabrics, in order to test the intelligent algorithms in laboratory conditions.
- To develop and test an integrated experimental system for the robotic sewing and the fabric quality control.
- To demonstrate the results (acquired knowledge and experimental devices) in cloth making industries.
APoST - Advanced product-support technologies network
Contract Number: ASI/B7-301/97/0126-15- The main purpose of this project is to demonstrate the
benefits associated with Virtual Manufacturing (VM) and Rapid Prototyping
(RP) technologies and research, and increase the awareness amongst small and
medium enterprises (SMEs) and research institutions in Asia of advanced
methods for product development.
The objectives:- To build technology demonstration centres (TDC) in Malaysia and Thailand to do a feasibility study of VM and RP, and to disseminate information about these advanced concepts for product and manufacturing system design and product development.
- To develop two VM pilot applications: focusing on VM in product design and one on the application of VM in system design.
- To increase the awareness of Asian SMEs of the capabilities of the existing advanced methods for product development and to demonstrate rapid prototyping as a new technology for rapidly converting CAD virtual prototypes into physical prototypes.
- To increase the Asian companies' awareness of VM as a future strategy using advanced IT tools to support concurrent design processes.
- To enable Asian SMEs to estimate the benefits associated with the implementation of VM and RP