Navigation : EXPO21XX > AUTOMATION 21XX >
H05: Universities and Research in Robotics
> Auckland University of Technology
Auckland University of Technology


- Offer Profile
- Centre for Artificial
Intelligence Research (CAIR ) is one of the key research centres of the
School of Computing and Mathematical Sciences
We are a small group of researchers led by Professor Wai Yeap. Our work on robotics is aimed at developing a series of Albots, each providing some significant insights into how humans and animals compute representations of their spatial environments. In the literature on spatial cognition, the latter process is referred to as cognitive mapping and its product, a cognitive map.;
Product Portfolio
Albots: Bots providing some significant insights into how humans and animals compute representations of their spatial environments
- Albots are robots created specifically for the study of
cognitive maps and cognitive mapping. These robots are treated as a species
of their own and their cognitive mapping is being investigated. Much is
learned about cognitive mapping from observing how different biological
agents map their environment. It is argued that one could do likewise using
robots, provided one addresses similar problems that researchers working
with biological agents have encountered.
Thus, Albots are not robots that are created to simulate ideas about cognitive mapping. To distinguish the two, consider the important use of landmarks in cognitive mapping. In the simulation approach, a robot is programmed to use certain perceived features as landmarks, primarily to demonstrate how such information is used in a mapping process. In the Albot’s approach, the problem itself, i.e. how landmarks are identified and why, needs to be investigated. In order for the algorithm to be cognitively relevant, it has to exhibit some key characteristics of landmarks use in humans and animals. One such characteristic is that landmarks are sparse and far between i.e. not all unique features in each view are perceived as landmarks. How then does an Albot identify and use a landmark in its mapping process and what does it tell us about cognitive mapping?
Past and Future Projects
Albots0 and Albots1
- So far, we have created two Albots, Albot0 and Albot1.
Albot0, the first in the series, was designed to investigate how a creature
could utilize an inexact map to find its way home. A robot with sonar
sensors is used. Sonar readings are noisy and, without error correction, the
map created is highly distorted and inaccurate. This presents us with a
challenge: with such a map, how could Albot0 find its way home? This
challenge is often faced in biological agents with different sensory
capacities. We have created an algorithm for Albot0 to find its way home,
using distance and direction information afforded in its inexact spatial
map. Both pieces of information are typically used in biological agents. One
important lesson learned from implementing Albot0 is that the spatiality in
a cognitive map affords us rich and useful information. This argues against
recent suggestions that the notion of a cognitive map is not a useful one.
For details of this work, see: W.K. Yeap (2011) How Albot0 finds its way
home: A novel approach to cognitive mapping using robots. To appear in
Topics in Cognitive Science
Albot1 was designed to investigate how successive views are integrated to form a perceptual map. A laser-ranging robot is used. Note that the standard solution adopted by both robotics and cognitive science researchers is to transform the co-ordinates of objects in the current view to the next. This approach is attractive because there exists a simple mathematical process to do so and new probabilistic algorithms have been developed, extending the basic approach to cope with errors due to sensors. However, humans are found not to integrate successive views at the saccade levels and this phenomenon is known as change blindness. Their cognitive maps are fragmented and imprecise but if their perceptual map is precise and detailed, why so? Albot1 was created to investigate how a less detailed perceptual map could be created without having to integrate successive views and yet still precise enough to help us orient to unseen locations. Fig. 1 shows a fragmented perceptual map created by Albot1. For details of this work, see: W.K. Yeap (2011) A computational theory of humans perceptual mapping.
Accepted for Cognitive Science conference. W.K. Yeap, Md. Z. Hossain, and T. Brunner (2011)
On the implementation of a theory of perceptual mapping. Submitted to AAAI-2011.
We are currently extending our work to show how a perceptual map could be computed using vision and how landmarks could be identified and used. We are also working on using Albots to test infants discover concepts in their world i.e. a theory of original intentionality.
We are keen to use our new algorithms for practical uses of robots. One such application is to develop robots that can work autonomously in farms such as vineyards, spring onions farms and asparagus farms (see Figure 2).Could robots have original intent?
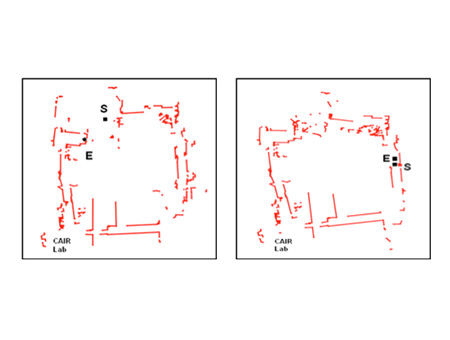
Figure 1: Perceptual maps produced using our new algorithm
- (from Figure 2 XX)

Figure 2: Could Albots wander and work in a vineyard