Navigation : EXPO21XX > AUTOMATION 21XX >
H05: Universities and Research in Robotics
> Oregon State University
Oregon State University

Videos
Loading the player ...
- Offer Profile
- The members of the Dynamic Robotics Laboratory explore, design, and build robotic systems that move swiftly and can easily handle impacts and kinetic energy transfer. Examples include walking and running robots, force-controlled actuators for delicate tasks such as bomb defusing, lower- and upper-extremity powered prosthetic limbs, exoskeletons for military use or assisted mobility for disabled persons, or catching a ball in the air. Many of these tasks are difficult or impossible for traditional robots due to fundamental limitations of the hardware, such as motor inertia and torque limits. The dynamics of the mechanical system are an inseparable aspect of the behavior of a robot, and can be either a limitation or an asset; thus, our approach integrates the design of the hardware dynamics with the design of the active software controller. Novel actuator designs and mechanisms combined with complementary software controllers can lead to robots that are as dexterous and agile as humans.
Product Portfolio
Dynamic Robotics Laboratory
- The members of the Dynamic Robotics Laboratory explore, design, and build robotic systems that move swiftly and can easily handle impacts and kinetic energy transfer. Examples include walking and running robots, force-controlled actuators for delicate tasks such as bomb defusing, lower- and upper-extremity powered prosthetic limbs, exoskeletons for military use or assisted mobility for disabled persons, or catching a ball in the air. Many of these tasks are difficult or impossible for traditional robots due to fundamental limitations of the hardware, such as motor inertia and torque limits. The dynamics of the mechanical system are an inseparable aspect of the behavior of a robot, and can be either a limitation or an asset; thus, our approach integrates the design of the hardware dynamics with the design of the active software controller. Novel actuator designs and mechanisms combined with complementary software controllers can lead to robots that are as dexterous and agile as humans.
RESEARCH
Robotic Legged Locomotion
- Working with Dr. Jessy Grizzle at the University of Michigan and with Dr. Hartmut Geyer at Carnegie Mellon University, we aim to build and control robots that are capable of robust, energetically efficient walking and running over natural, uneven terrain. Our approach begins with a bio-inspired dynamic model, from which we create theoretical control strategies proven to produce the desired stable and efficient running gaits using these models. We then design robots to match these simple dynamic models as closely as possible. Finally, we create a control framework to map the control of the ideal model to the behavior of the robot, because the robot will be an imperfect representation of our model. This path from theoretical models to robotic implementation is a circular path, as we learn about engineering limitations and novel control ideas, and revise our mechanism and controllers accordingly.

Optimization Inspired Control
- Optimization-Inspired Control (OIC) is a method for discovering simple, principled optimal control policies for dynamical systems. It is a mirror to bio-inspired approaches, but uses optimized solutions as the source of inspiration instead of biology. With a handful of computed trajectories perfectly solving small slices of the task, patterns emerge which are clues to developing a general, optimal controller which solves the larger problem. We believe that the structure of these simple controllers yield hidden insight into the systems they control.
Animal Locomotion
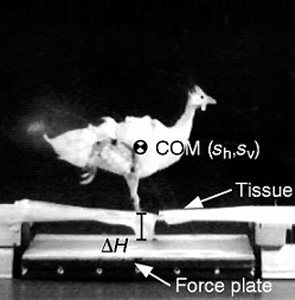
- Working with Dr. Monica Daley's Comparative Neuromechanics team in the Structure and Motion Lab at the Royal Veterinary College, we are investigating control methods birds use to navigate rough terrain, using ATRIAS as a tool for direct comparison to running birds. This scientific work is funded through the Human Frontier Science Program. We will design experiments to determine how ground birds, such as guinea fowl and ostriches, run over disturbances such as changes in ground height or stiffness. We will use these data to develop hypotheses about the strategies used by birds to negotiate varied terrain, and formulate these hypotheses as mathematical models. The resulting models will be used as control targets for ATRIAS. It is hoped that this will result in ATRIAS and ground birds achieving similar locomotor behaviour in the same terrain conditions. Through this work, we will discover how animals negotiate rough terrain, and we will learn how to implement robotic systems that can match their performance. This work is directly applicable to new powered prosthetic legs, exoskeletons, and robots that can navigate in human environments
LEGGED ROBOTS
ATRIAS 2.0 MONOPOD
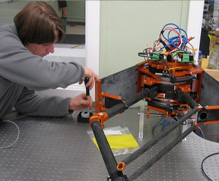
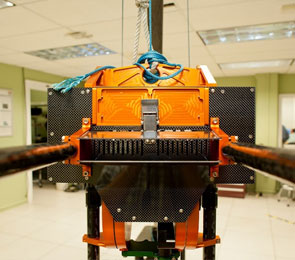
- ATRIAS 2.0 is the second physical realization of the ATRIAS concept of an actuated spring mass walking, running and jumping bipedal robot. Built as a monopod, the 2.0 version is an engineering design revision of the original ATRIAS 1.0 monopod. Significant changes include incorporation of a harmonic drive transmission instead of a cable drive, a larger torso to house on board electronics, batteries and the hip motors (these motors drive the toes together or apart). This prototype will lead to multiple 3D bipedal versions that will be used for research at Oregon State University, Michigan State University and Carnegie Mellon University.


ATRIAS 1.0 MONOPOD
- ATRIAS is designed for agile, robust, and
energetically economic walking and running over uneven terrain, in addition
to other highly dynamic maneuvers such as hopping, jumping, and skipping.
The passive dynamics, or the behavior of only the mechanical components of
the system, are designed specifically to match a simple, bio-inspired
mathematical model. This implementation of a simple dynamic model will
enable theory-based control, and enable a clear understanding and analysis
of the dynamic behaviors. Our high-level goals align with those of the W
Prize, for unprecedented speed, efficiency, and dexterity in terrestrial
locomotion.
ATRIAS is part of two collaborative research projects: one focused on scientific goals of understanding ground-running bird locomotion strategies, and another focused on agile, efficient robotic locomotion. These projects are complementary, because a clear understanding of animal locomotion will lead to useful insights and ideas for robotic locomotion.


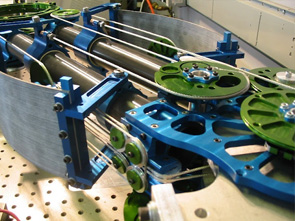
MABEL
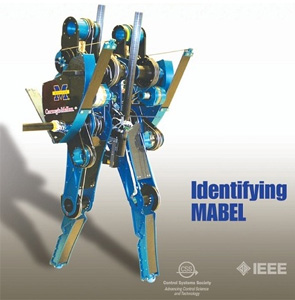
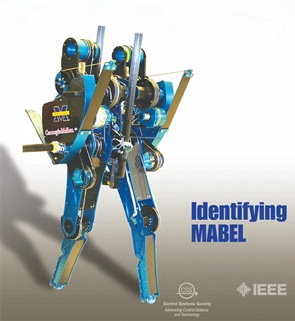
- MABEL is a biped based on the Electric Cable
Differential (ECD) Leg designed by Dr. Hurst. In collaboration with Dr.
Grizzle, MABEL was designed for for running, walking, jumping, hopping, and
generally behaving in a highly dynamic manner. Large fiberglass springs are
used for storing the energy of a running gait, much like the springs in a
pogo stick or the tendons in a kangaroo.
The name "ECD Leg" is derived from the method of actuation and power transmission; we use electric motors, which offer much simpler and more precise computer control than pneumatic or hydraulic actuators. The motors are connected to the leg joints using steel cable wrapped around aluminum pulleys, and there are several mechanical differentials to implement the desired relationship between the electric motors, fiberglass springs, and leg joints.

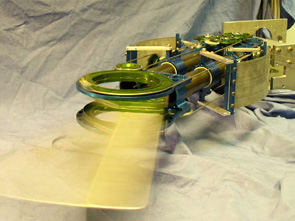
Thumper
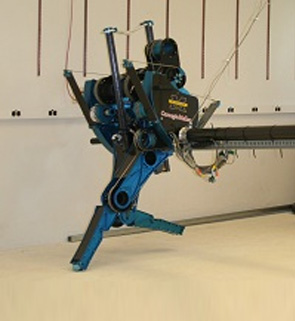
- Thumper is a monopod based on the Electric Cable
Differential (ECD) Leg designed by Dr. Hurst for running, walking, jumping,
hopping, and generally behaving in a highly dynamic manner. Large fiberglass
springs are used for storing the energy of a running gait, much like the
springs in a pogo stick or the tendons in a kangaroo.
The name "ECD Leg" is derived from the method of actuation and power transmission; we use electric motors, which offer much simpler and more precise computer control than pneumatic or hydraulic actuators. The motors are connected to the leg joints using steel cable wrapped around aluminum pulleys, and there are several mechanical differentials to implement the desired relationship between the electric motors, fiberglass springs, and leg joints.

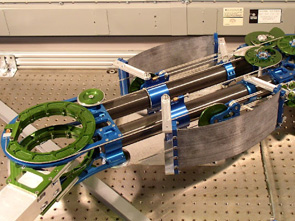
BIMASC
- BiMASC (Biped with Mechanically Adjustable Series
Compliance) is the first realization of the Electric Cable Differential (ECD)
leg designed by Dr. Hurst for running, walking, jumping, hopping, and
generally behaving in a highly dynamic manner. Large fiberglass springs are
used for storing the energy of a running gait, much like the springs in a
pogo stick or the tendons in a kangaroo.
The name "ECD Leg" is derived from the method of actuation and power transmission; we use electric motors, which offer much simpler and more precise computer control than pneumatic or hydraulic actuators. The motors are connected to the leg joints using steel cable wrapped around aluminum pulleys, and there are several mechanical differentials to implement the desired relationship between the electric motors, fiberglass springs, and leg joints.

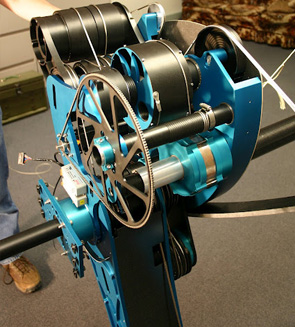

AMASC
- The Actuator with Mechanically Adjustable Series Compliance (AMASC) is designed for use in the BiMASC, a highly dynamic legged robot. It has fiberglass springs with a large energy storage capacity. The mechanism has two motors, one for moving the position of the knee and the other for controlling the stiffness felt at the knee. These two parameters, along with the hip angle, are used for control of a running gait.
OTHER PROJECTS

Mars Rover Robotic Arm 2011
- Description: This project is an extension of the
Oregon State University Rover Club for use in the University Rover Challenge
(URC). For the past four years, the Mars Society has hosted the URC at its
Mars Desert Research Station in southern Utah. The premise of this
competition is to challenge teams of university students to design and build
the next generation Mars rover.
Year: 2011

SWAT Vehicle Robotic Arm
- Description: The purpose of the arm is to increase the
operating area of the SWAT Reconnaissance Vehicle by enabling it to open
household doors and closets. The arm was designed to be able to open typical
household doors with L-shaped handles or knobs.
Funded by: Salem Police Department
Year: 2010

Mars Rover Robotic Arm 2010
- Description: This project is an extension of the
Oregon State University Rover Club for use in the University Rover Challenge
(URC). For the past four years, the Mars Society has hosted the URC at its
Mars Desert Research Station in southern Utah. The premise of this
competition is to challenge teams of university students to design and build
the next generation Mars rover.
Year: 2010

SWAT Team Vehicle
- Description: The purpose of the vehicle is to
enter potentially dangerous and hostile situations remotely and with the
ability to convey mission-critical information to SWAT team members.
Funded by: Salem Police Department
Year: 2009
FACILITIES
- Laboratory Building
The Dynamic Robotics Laboratory is well-equipped for the design, construction, and troubleshooting of robotic systems. There are two main rooms; one larger room with space for robots to run in a circle, and an adjacent room for robot fabrication and benchtop experiments. Our fabrication room includes 10 meters of workbench space, a steel table equipped with power supplies, computers, and mounting points for prototype actuation systems, stocked electronic connectors and fastener hardware, and five computers dedicated to mechanical design and circuit design. We have an existing infrastructure of hardware and software for construction and control of robots, along with experience in designing and constructing functional machines.