Navigation : EXPO21XX > AUTOMATION 21XX >
H05: Universities and Research in Robotics
> University of Southern Denmark
University of Southern Denmark


- Offer Profile
- FroboMind is an open-source
robot control system software platform designed for field robotics research
by many universities, companies, groups and researchers at the University of
Southern Denmark. It uses the same generic platform across different
projects to maximize reuse of existing work.
Product Portfolio
FroboMind
- FroboMind is a robot control system software platform designed for field robotics research. It provides the means of using the same generic platform across different projects, field robots and implements and hereby maximizing reuse of existing work. FroboMind is open-source and permits royalty free commercial use of the work. It is implemented in ROS and runs on Ubuntu Linux.
What is FroboMind
- The aim of FroboMind is to standardize robot software development across
projects, robots and implements and optimize the robot software in terms of:
- Modularity and code reuse in order to decrease time spent on software development, debugging and testing.
- Extensibility and scalability, It must accommodate implementations from small student projects to advanced research project.
The FroboMind software platform consists of an operating system, a middleware and an architecture that defines the organization of software components into layers and modules with well defined interfaces.
Operating System
FroboMind supports the latest Ubuntu Long Term Support (LTS) release.
Middleware
FroboMind has been implemented in ROS (Robot Operating System).
Architecture
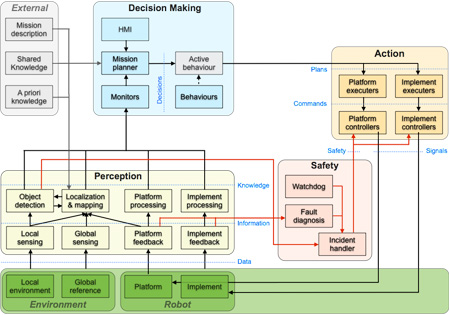
The FroboMind architecture is based on an intuitive decomposition of the perception, decision making and action tasks of a field robot FroboMind:Architecture
- The FroboMind architecture is based on an intuitive
decomposition of the perception, decision making and action tasks of a field
robot.
The robot perceives the surrounding environment through its sensors and feedback from the robot and implement systems. It combines the perception with shared and a priori knowledge. Based on this accumulated knowledge, the robot mission description and user interaction, the robot selects a behaviour that seek to optimize the fulfillment of the mission task. The behavioural actions are then executed with respect to time and state.
Data flow is illustrated by connecting arrows. An arrow tip next to a module indicates that the data is used as input while the lack of an arrow tip indicates that data is outputted from the module. In order not to clutter the overview it is assumed that any component has access to data accessible by it’s predecessor, and therefore multiple connections to successors are shown only when relevant to the understanding of the architecture. Data available for all components have not been included in the overview.
Internal fault diagnosis, system watchdog and incident handling tasks are organized as a separate Safety layer to ensure maximum simplicity and clarity in these modules and hence minimize potential software errors, which in turn ensures a high level of reliability. The safety layer serves to improve the robustness of the robot autonomy by facilitating behavioural responses to internal and external incidents. The safety layer is capable of activating but not deactivating or inhibit activation of the hardware emergency stop circuit.
Modules represented by a grey rectangle are included to fully describe the functionality. They do not represent actual code. Robots
Frobit
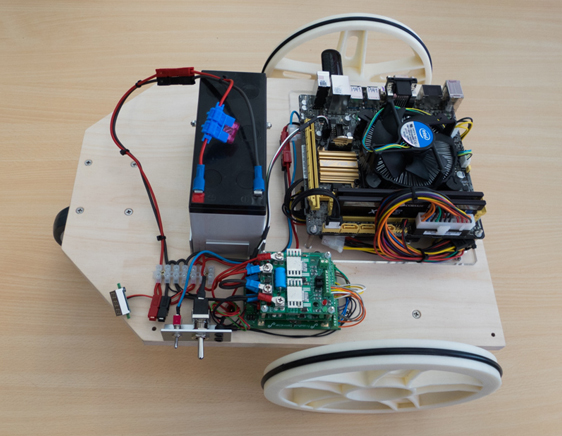
- Frobit is a small differential steered robot designed
for rapid prototyping of applications as well as curricular activities
within field robotics. The idea behind the design is to have a small,
low-cost and easy to build open source robot platform for developing
software components for the FroboMind architecture. The Frobit is
differential steered with a passive castor wheel. It currently exists in two
main versions:
- A small and very low-cost Frobit for indoor use only (documented here)
- A larger more durable FrobitPro which is suitable for both indoor and outdoor use (documented here)
Frobit software
The Frobit is used as reference platform for FroboMind meaning that FroboMind contains updated demo examples for the Frobit that works.
Below is a video showing the frobit demo example for waypoint navigation using wheel encoders and a gyro for relative pose estimation. Armadillo
- Armadillo was developed by the University of Southern
Denmark and Aarhus University in 2011. It is a tracked toolcarrier featuring
the FroboMind architecture implemented in Robot Operating System ROS.org and
a high degree of modularization.
Projects
The Armadillo is currently being utilized in two projects within precision navigation in row crops and humanitarian demining. For more informaton please visit the Projects page.
Description
The Armadillo platform consists of two independent track modules and an exchangeable tool carrier module in between. Removing a track module from the tool carrier module requires only removal of 8 bolts and disconnecting the power and communication cables, a process which takes a few minutes.
Armadillo has electrical propulsion allowing different power sources such as battery packs, generators and future sustainable energy sources like fuel cells etc.
Each of the Armadillo track modules can be regarded as self contained propulsion modules, with on-board electric motor, motor controller and gearbox. This gives rise to a flexible vehicle platform where track modules, and the supporting hardware such as battery packs and robot computer, can be mounted in different configurations favouring e.g. weight distribution or other requirements of the implement that must be carried.
The track module is powered by a 3.5kW brushless DC motor. With a 1/25 gear ratio, which gives a top speed of 7.4 km/h and an expected 25% loss in the powertrain, one track module can deliver 1kN continous thrust and up to 1.7kN thrust in 30 second bursts.
Currently the Armadillo carries two exchangable 48V 100Ah battery weighing 150kg each. The battery packs are based on deep-cycle lead-acid batteries supporting a 50% discharge. This gives the Armadillo 40 minutes of worst case operating time at maximum continous power. In normal operating conditions, where a vehicle with two track modules have to overcome a dynamic friction of 500N, an effective operating time of 2.6 hours can be expected. With additional battery packs ready and charged, the vehicle can be operational as long as desired. Each battery pack can be recharged in 4.5 hours. More advanced and expensive battery technologies, such as Lithium-ion, will improve performance in terms of weight and operating time per charge. ASuBot
- ASuBot is an acronym for Aarhus and Southern Denmark
University Robot, a joint project between the faculty of engineering at
Aarhus University and the faculty of engineering at the University of
Southern Denmark.
Description
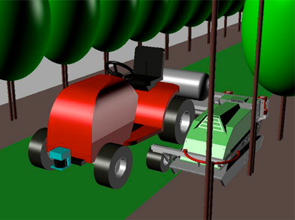
ASuBot is based upon a Massey Fergusson 38-15 garden tractor retrofitted with a Topcon AES-25 steering system. The ASuBot robotics computer FroboBox features the FroboMind architecture implemented in Robot Operating System
ASuBot has been utilized in a research project focusing on weeding in organic orchards. Today this is a quite tedious process as herbicides are not allowed and weeding are therefore typically carried out using either a mechanical process or weed burning. Weed at a closer distance than half a meter to the fruit trees compete about the nutrients, therefore the amount of weed within that distance needs to be kept at a very low level. Under normal circumstances weeding has to take place every week.
In the research project we focused on organic weeding using a gass burner and an autonomous garden tractor. The tractor navigates autonomously through the entire orchard ensuring that the gas burners are not damaging the trees. Navigation is accomplished without a GNSS because of problems with the trees shading the GNSS antenna sometimes. Since RTK-GNSS receivers are still quite expensive this also lowers the price of the robot.
ASuBot is based upon a Massey Fergusson 38-15 garden tractor retrofitted with a Topcon AES-25 steering system. FroboMower
- FroboMower is a small mower platform based on a
commercial low-cost robotic mower. The purpose of FroboMower is to perform
field experiments related to grass cutting and precision weeding as well as
related topics like area coverage, state estimation based on low-cost
sensors, robust autonomous behaviour etc. FroboMower is currently
operational and is being used in various projects.
The original electronics has been replaced by a RoboCard running the Frobit firmware and FroboMower is thus fully supported by FroboMind just like the Frobit robot. The RoboCard controls the propulsion motors through a H-bridge motor controller, and low-cost optical rotary encoders have been installed on the wheel shafts to provide odometry feedback. The three cutter motors are controlled by the RoboCard as well. An Inertial Measurement Unit (IMU), a mast for a GNSS antenna and a laptop platform have been installed to support the experimental work. FroboScout
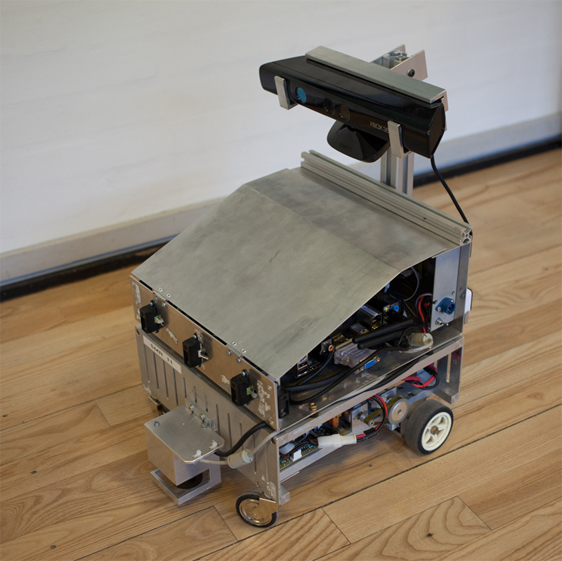
- FroboScout is a small differentially steered field
robot designed for various scouting tasks as well as test platform for field
robot software. FroboScout is based on the following design goals:
- Keep it simple
- Low cost
- Accurate navigation
- Reasonable off road performance
In a current project it is used for surveying tasks that are part of the quality assurance when constructing new roads. It navigates a specified route and at predetermined measuring locations it waits a defined number of seconds while the surveying station performs a precise relative measurement to the optical prism installed below the GNSS antenna.
The construction of FroboScout began back in 2005. It was originally named CetusBot and used the Field Robotics Embedded Computer (FiRECom). It has been updated to support FroboMind. GrassBots
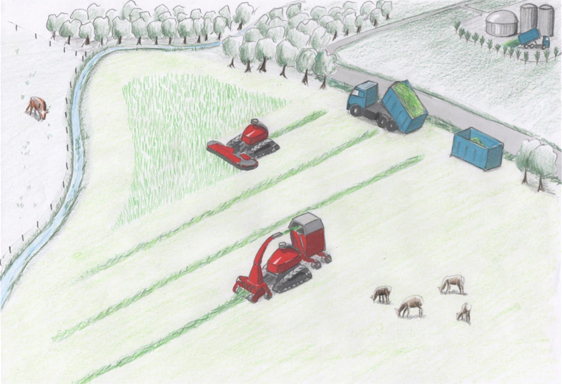
- GrassBots is a current project (2013-2015) concerning
grassland harvesting operations of lowlands for bio gas and bio refinery
plants. This page focuses on utilizing FroboMind for some of the robot
platforms developed during the project.
Specifications- Cutting width: 3 m
- Weight: 2.200 kg (Lynex carrier) plus 800 kg (Kongskilde grass cutter).
- Propulsion: Hydraulic driven tracks.
- Power source: 100 hp diesel engine.
- Robot computer: Conpleks Robotech 501 Controller.
- Navigation sensors: Sick rotary encoders, VectorNav VN-100 IMU, Trimble BX982 RTK-GNSS.
- Robot software: FroboMind Software Platform
DTU SMR
- Back in 1999 the Technical University of Denmark built
12 Small Mobile Robot (SMR) platforms for the purpose of teaching and
supporting thesis-based research. Due to continuous maintenance and
upgrading these robots are still going strong and are used extensively by
the department of Automation and Control, DTU Electrical Engineering. They
run the Mobotware software.
Mobotware
Mobotware is a plug-in based software framework developed at Automation and Control, DTU Electrical Engineering, Technical University of Denmark. The software is used for education and research in mobile robotics and has been ported to different hardware platforms and applications. Important design criteria have been real-time performance of the control level, easy integration of sensors, fast porting to new robots and core system stability and maintainability in an undisciplined programming environment. Mobotware provides a simple scripting robot control language which also supports use by non-technicians.
FroboMind integration
Mobotware components have been added to FroboMind to include support for the SMR. The advantage of this is that it allows use of FroboMind and ROS packages while still benefiting from the Mobotware superior real-time performance. Previous Robots
- This lists robots that are based on a Field Robotics Embedded Computer (FiRECom), the predecessor to FroboMind.
Casmobot
- Casmobot was developed by the University of Southern
Denmark during 2007-2009 as part of Plant Nursing Robotics, a technology
transfer project. Casmobot is an acronym for Computer Assisted Slope Mowing
Robot. The Casmobot vision was to design and develop an application module
for slope mowers which enables them to perform the mowing semi-autonomously.
Casmobot was based on a Lynex slope mower retrofitted with a Field Robotics Embedded Computer (FiRECom) the predecessor to FroboMind.
Casmobot was the first of our robot platforms which is remote controlled by a Nintendo Wiimote. What started out as a funny idea one late friday afternoon in the robotics lab turned out to be a great demonstrator of user friendly robot control as the Wiimote seems so much more intuitive than an industrial standard remote control unit. Hortibot
- Hortibot was developed at the former Danish Institute
of Agricultural Sciences, now a part of Aarhus University, DK.
Hortibot is a tool carrier capable of traversing a field of row crops starting at one of the field corners. It follows the row of crops using a row camera from ECO-DAN (now acquired by Claas Agrosystems) and at the end of the row it turns using a gyro sensor and drives back along the neighboring row etc.
Several implements were made for the Hortibot, the most notable being a cell sprayer prototype. Cameras continuously take pictures of the ground and the images are analyzed to determine the location of crops and weed within the image. A row of nozzles placed behind the cameras are then activated so that only cells (4x10cm) where weed have been detected will be sprayed.
Hortibot was selected as one of The Best Inventions Of The Year 2007 by Time Magazine. Research projects
Research projects
- Organic weeding using a gass burner and an autonomous tractor in orchards
- Precision spraying of weed in row crops
- Autonomous weeding of dandelion on turfs and lawns
- Humanitarian demining
- Participation in FieldRobotEvent 2012 (student projects)
- Line marking of football fields
Field Robot Summer Course
- Why waste your summer vacation doing nothing at the
beach, when you can have fun building an autonomous field robot for
sustainable biological production together with fellow students at the
University of Southern Denmark?
Information- Design & development of field robots for plant nursing
- starts every year in summer (full time study)
- Faculty of Engineering, Odense, University of Southern Denmark
- 7.5 ECTS, individual oral exam, grading according to Danish 7 point scale.
You must be enrolled in an engineering or science study program and passed the 4th semester in design, mechanics, computer science, physics, mathematics, etc. The course is free of charge for BSc and MSc students within DK as part of their curriculum, others will have to pay a course fee. Please look at the Information and materials page for more information. 
Field Robot Summer Course
- You will work in interdisciplinary project groups with
students from design, mechanics, electronics, mechatronics, computer
science, mathematics, physics etc. Each group will build their own field
robot and will have an opportunity to participate in the international
competition FieldRobotEvent.