- Offer Profile
- Robotnik is a company
specialized in robot product development and robotics R&D projects.
Robotnik has a multidisciplinary engineering team, which is qualified in several fields (computers, manufacturing, industrial, telecommunications, mechanics, etc).
Our main specialities are:
Design, manufacturing and commercialization of robotic products (mobile robots, robot arms, robotic hands and humanoids).
Robotics


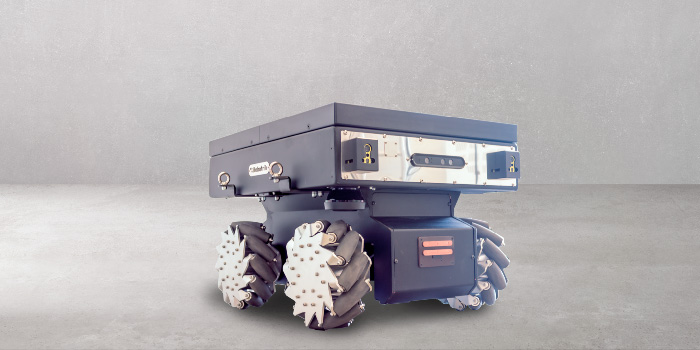



Mobile Robots
-
Mobile Robots Range
Our portfolio includes a wide variety of products for the development of industrial applications and R&D in Service Robotics
Main Advantages of our Mobile Robots
Easy configuration
Easy configuration and installation adapting to the needs of each client, with open software and hardware
Autonomy
Their activity complements or replaces that carried out by any worker during 1 or more shifts
Collaborative
Collaborative mobile robots are perfect for sharing workspace with different people
Omni-directional movement
Allows the reduction of times, making it 1/5 times faster than a differential
Advanced User Interface (HMI)
To generate maps and redefine routes and waypoints
FMS (Fleet Management System)
For the coordination of a fleet of robots that share the same workspace and resources





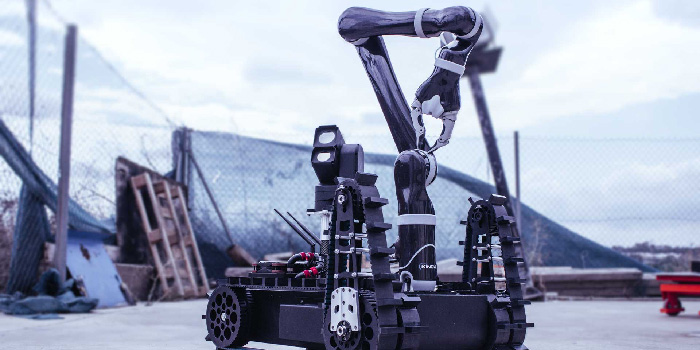
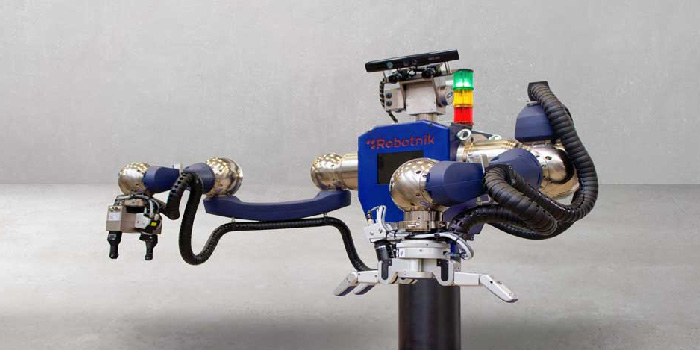
Mobile Manipulators
-
Mobile Manipulators Range
Our portfolio includes a wide variety of products for the development of industrial applications and R&D in Service Robotics
Main Advantages of our Mobile Manipulators
Easy configuration
Easy configuration and installation adapting to the needs of each client, with open software and hardware
Autonomy
Their activity complements or replaces that carried out by any worker during 1 or more shifts
Collaborative
Collaborative mobile manipulators are perfect for sharing workspace with different people
Omni-directional movement
Allows the reduction of times, making it 1/5 times faster than a differential
Advanced User Interface (HMI)
To generate maps and redefine routes and waypoints
FMS (Fleet Management System)
For the coordination of a fleet of robots that share the same workspace and resources
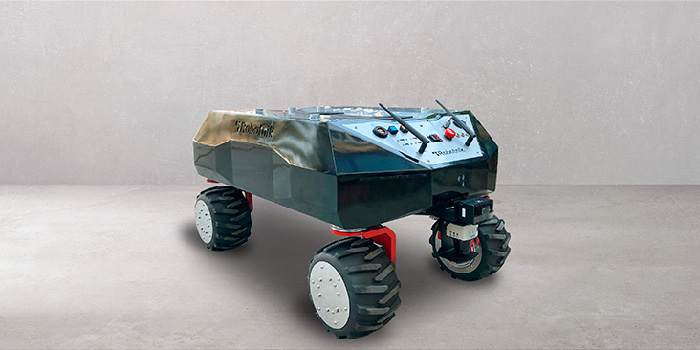
Robots design and customization
- We design and manufacture mobile robots and mobile manipulators according your needs
Robots design and customization
-
Prototype Range
Our portfolio includes a wide variety of products for the development of industrial applications and R&D in Service Robotics
Main Advantages of our Prototypes
We design prototypes if there are not a solution in the market
Our services cover all phases of the project life cycle from concept to completion
Customizations for different applications: inspection and maintenance, logistics, cleaning or transport
SERVICES - LOGISTICS

-
Mobile robotics in the logistics market, new horizons
Collaboration with robots is a way to increase productivity
What is a Collaborative Mobile Robot (CMR)?
A CMR is an intelligent mobile robot that assists humans in a shared workspace.
The main objective of any company is to obtain maximum efficiency in their work processes. A Collaborative Mobile Robot helps achieve this when it comes to transporting merchandise indoors. In this way, mobile robotics at the logistics sector optimizes the tasks that are repetitive, tedious and/or dangerous.
CMR technology is ready to be implemented in most industries.
SERVICES - INSPECTION AND MAINTENANCE

-
Inspection and maintenance robots
Bring automation to hazardous or dangerous environments is one of the purposes of inspection and maintenance robotics. Keeping people away from this environment and optimizing the work is the purpose of a robot. Maintenance and inspection are related with some monotonous and repetitive operations, introducing robots in these tasks reduces also the costs due to fatigue or inattention.
Success cases
Inspection and maintenance robot for the service tunnel with the electrical interconnection between France and Spain.
Robotnik has developed a fleet of vehicles to perform the inspection and maintenance works inside the tunnel between France and Spain. The robots are autonomous, so they work without requiring human intervention in inspection tasks.
The robots incorporate a large range of sensors, which provide information about the status of the installations inside the tunnel. Moreover, the vehicle can carry three people and the appropriate equipment in order to carry out the maintenance.