10 t - 25 t
15 t
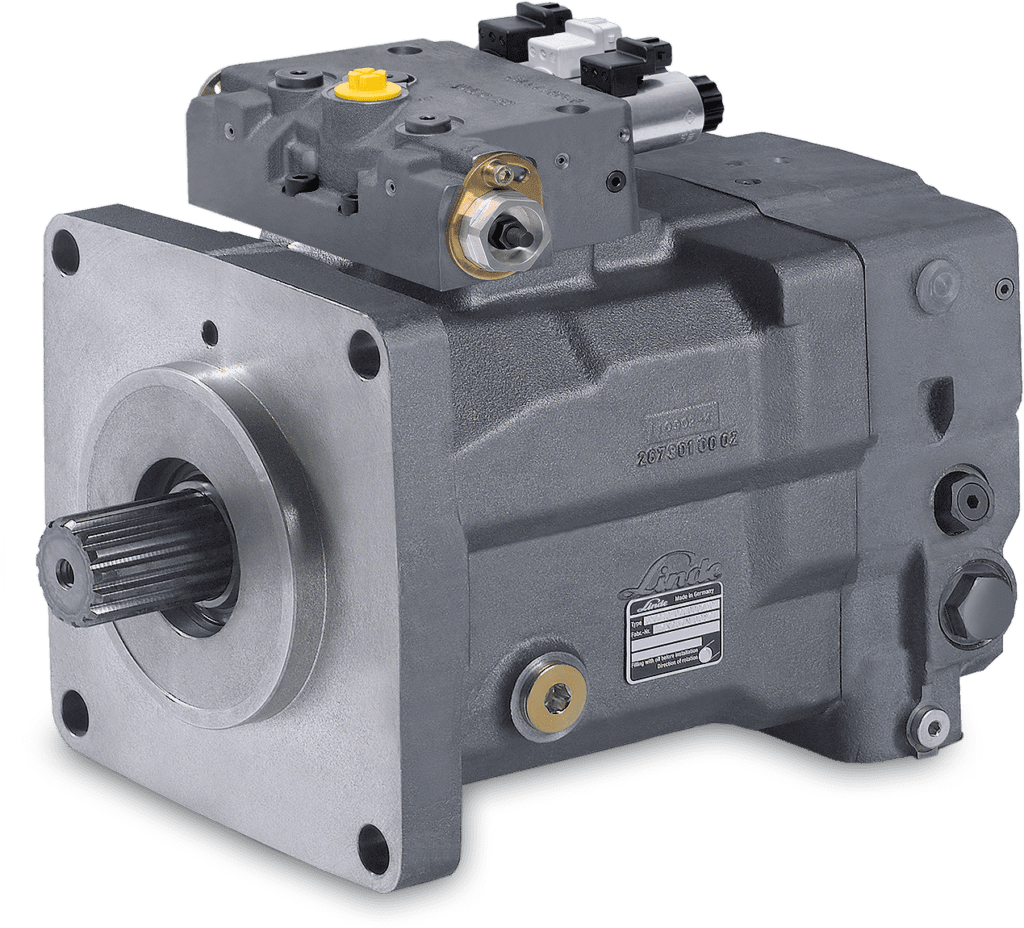
1x HPV 105-02 E1 (drive pump) + 1x HPV 55-02 E5 (vibration pump)
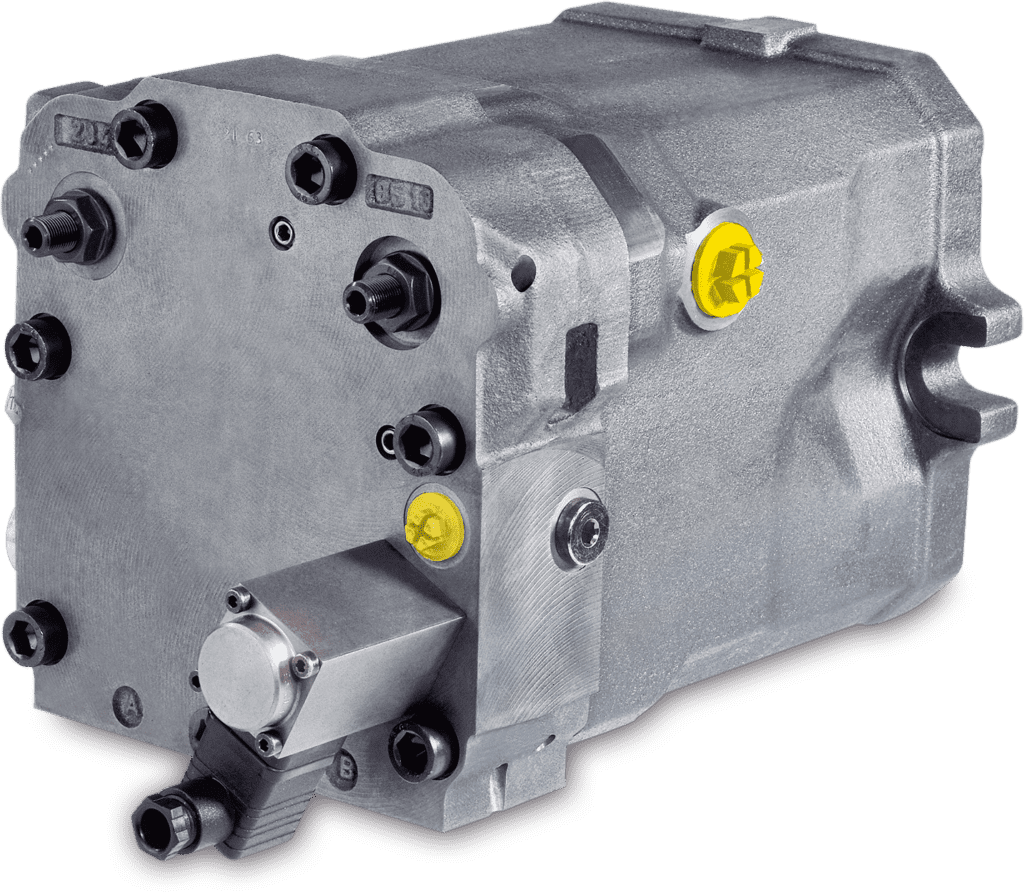
1x CMV 115 E400 (drive motor rear)
1x CMV 60 E400 (drive motor front)
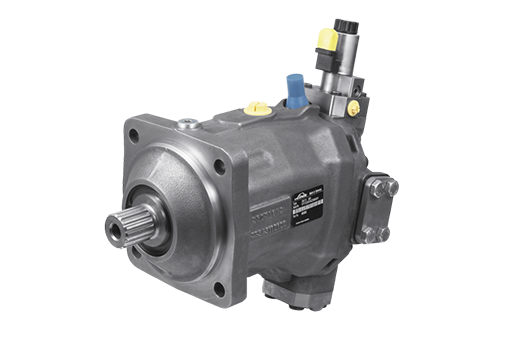
1x HMF 35-02 (vibration motor)
1x iCon (electronic control unit)
- High compression power and compacting quality,
even with a small number of passes - Eases the operation for the driver
- Automatic traction control thanks to torque transfer
- Decentralized design with two wheel motors, so that the engine can be positioned lower, which allows a lower centre of gravity
Roller
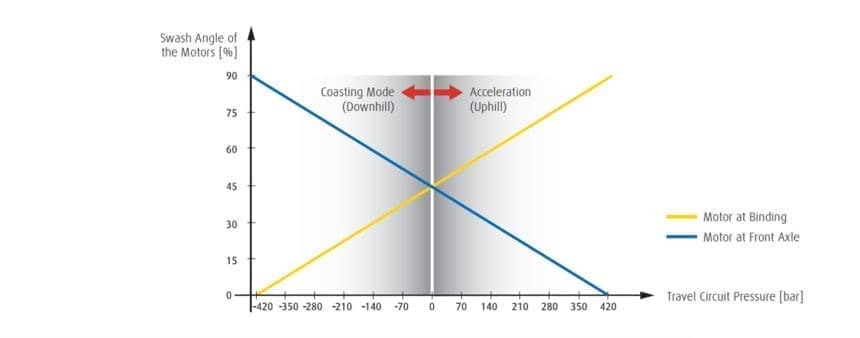
Even, jolt-free starting, driving and rolling set all Linde Hydraulics drive units apart. The key feature of the drive unit in the compactor in this example is the hydraulic traction control. The compactor boasts two hydraulic motors connected in parallel. One of these drives the rear axle, while another rotates the binding.
The system is able to complete its functions with very little input. Only a single pressure sensor monitors the drive pressure in the drive train. A tilt angle sensor is not necessary for the system to function. The more the drive resistance increases, either due to higher speeds, rougher terrain, or gradients, the more the pressure increases in the drive circuit of the machine. A pressure sensor detects this and reports the status to the electronic control unit, which sends a control signal to the motors.
When accelerating and driving on slopes, the transferable torque moves to the rear axle. The motors are adjusted accordingly and continuously shift a higher percentage of torque from the front to the rear axle – i.e. the axle with the better traction.
In coasting mode, the drive torque is distributed to the binding to benefit the front axle. This generates increased supporting torque, which allows the machine to move in a controlled manner. The drive on the rear axle is increasingly relaxed to maintain good steering properties.
Thanks to the rapid response time of the controller and motor, this all happens very evenly and without any interruption of tractive effort. The driving speed remains constant. The operator does not have to intervene manually and can concentrate fully on the task of achieving consistently high compacting quality.
This is further supported by the vibration drive for the binding. The strength and frequency can be set independently from the driving speed.