









Micropartner
- Handhabungs-Manipulatoren mit Gelenkarmen









Funktionen
- Max. Tragkraft: 125 kg
- Max. Arbeitsradius: 2800 mm
- Vertikaler Hub: 2450 mm
- Arbeitsdruck: 0.7 ÷ 0.8 Mpa
- Steuerung: ausschließlich pneumatisch
- Versorgung: trockene, saubere Druckluft (40 µm), öl- und schmutzfrei
- Geräuschpegel: <70 dB
- Max. Hubgeschwindigkeit: 0,5 Meter/Sekunde
- Arbeitstemperatur: von +0° bis +45° C
- Verbrauch: von 50 Nl ÷ 100 Nl pro Arbeitszyklus
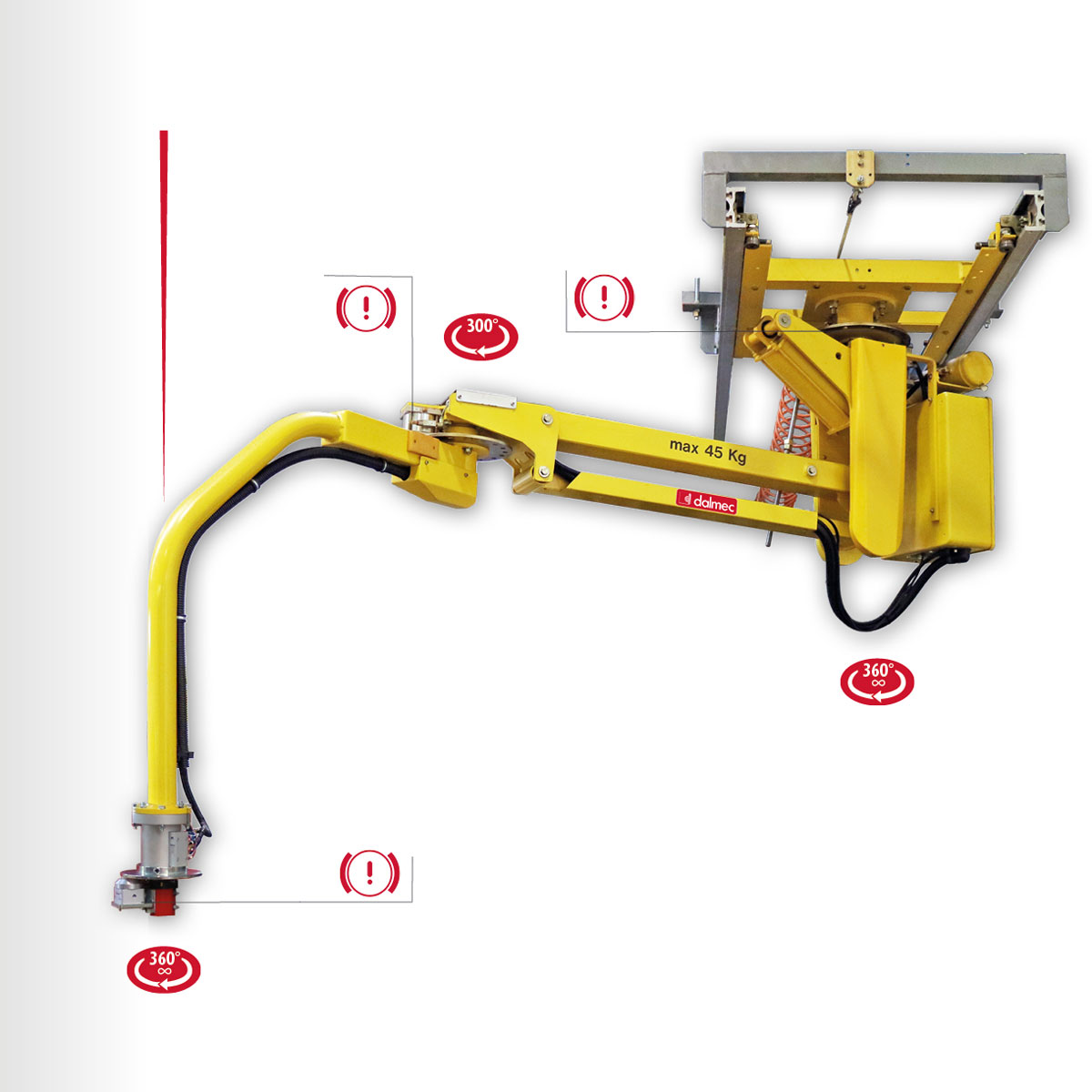
- Drehungen: – 360°- Endlos- Drehung des Säulen- und Vorrichtungsdrehgelenks – 300° Drehung des mittleren Drehgelenks zwischen Parallelogramms und Auslegearm
AUSFÜHRUNG
- Atex Deckengerät stationär
- Atex Deckengerät verfahrbar
- Atex Säule
- Deckengerät stationär
- Deckengerät verfahrbar
- Edelstahl Deckengerät stationär
- Edelstahl Deckengerät verfahrbar
- Edelstahl Säule
- Säulengerät
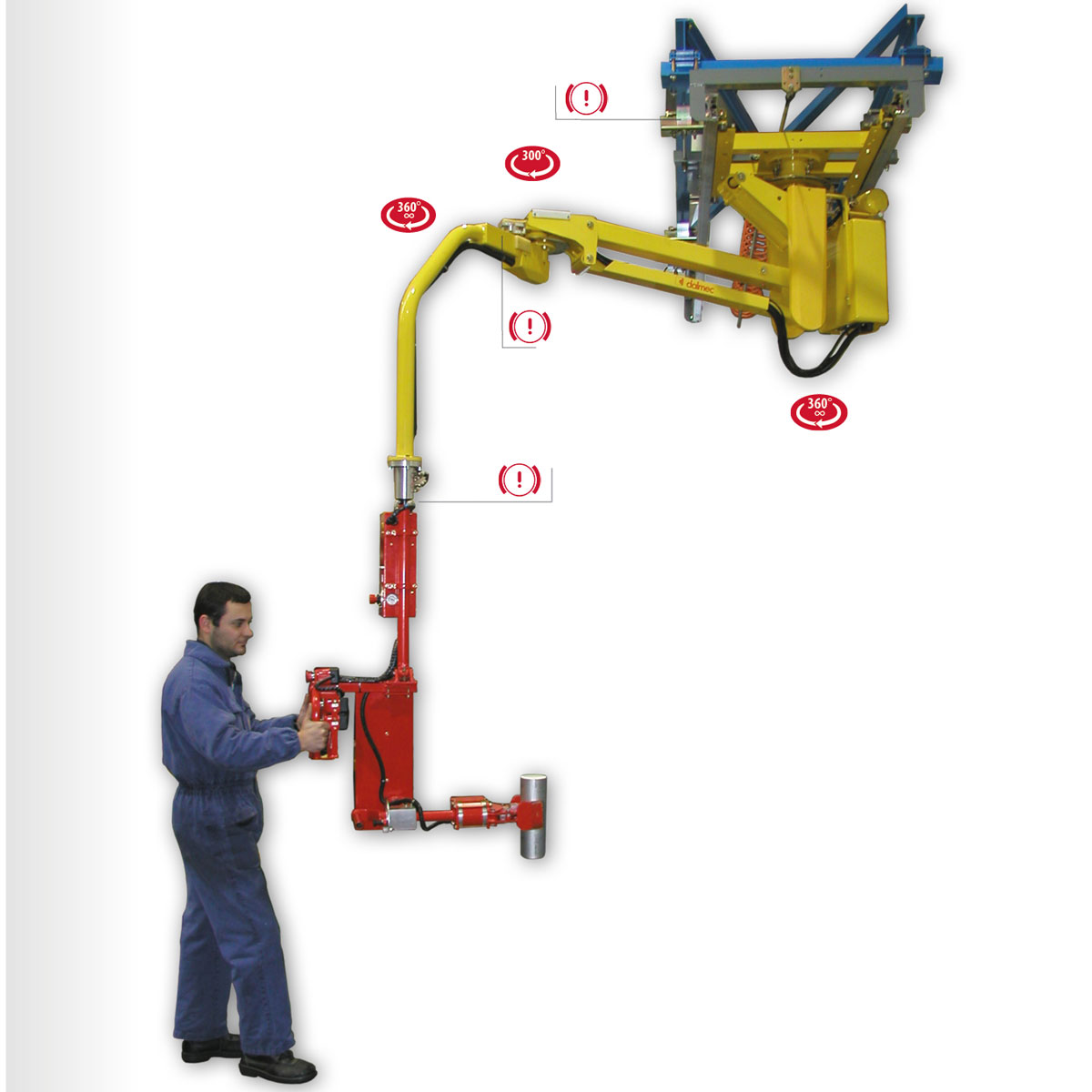
HANDHABUNGS-MANIPULATOR MICROPARTNER MIT GELENKARMEN
Der Micropartner MI wird aufgrund seiner kompakten Bauweise und wegen seiner Handlichkeit und Leichtigkeit besonders geschätzt. Mit Applikationen verschiedener Aufnahmevorrichtungen, ermöglicht der Manipulator das “schwerelose“ Umsetzen, Drehen und Schwenken mittelschwerer Produkte im gesamten Arbeitsbereich. Damit kann der Arbeiter schnell, mühelos und präzise – in ergonomischer Position und mit der größtmöglichen Sicherheit – arbeiten.



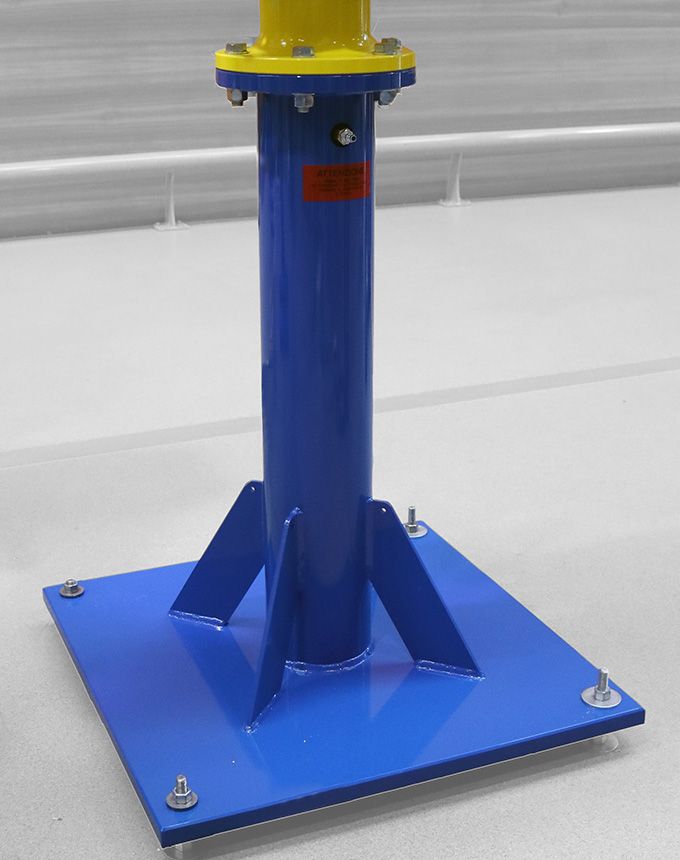
| Stabile Grundplatte zur Bodenbefestigung | Verfahrbare Grundplatte mit Gabelstapler | Verfahrbare Grundplatte mit Hubwagen |
 |  |  |
| Verfahrbare Grundplatte für manuellen Transport | Bodenverfahrbare Grundplatte auf Profilschienen | Verfahrbare Grundplatte in bodenversenkter Laufschiene |
 |  |  |

Befestigungsflansch
Der pneumatische Manipulator als Deckengerät stationär verschafft einen freien Produktionsbereich.
Der Flansch des Manipulators ist mit Bohrungen für die Anbindung mittels Schrauben ausgestattet, die eine Befestigung am kundenseitigen Stahlträger oder einer Konsole erlauben.
Alle Bewegungen im Raum sind frei und werden mit minimalem Aufwand durch die direkte Wirkung des Operators auf der Aufnahmevorrichtung oder auf der Last erreicht.

Befestigung
Der Manipulator wird komplett mit Laufwagen ausgeliefert.
Laufsystem
Das Laufsystem besteht aus zwei gegenüberliegenden U- Profilen aus speziellem Aluminium mit Federbandstahleinlagen ohne Übergangsstellen. Die Verbindung zwischen den verschiedenen Teilen erfolgt durch Schrauben.
Aufhängung an der Tragstruktur
Die Befestigung der Laufschienen an die Stahlbaukonstruktion erfolgt durch Querträger und Aufhängungen.