
- Offer Profile
Members of the Donald Lab are conducting research in two areas: - Computational Biology and Chemistry
- Microelectromechanical Systems (MEMS) and Microrobotics.
Microelectromechanical Systems (MEMS) and Microrobotics: Micro Actuator and Micro Manipulation Systems
- The goal of this research is to build microsystems that can actively, accurately, and efficiently interact and change the physical world. While so far MEMS research has been biased more towards sensor technology, there are a large number of potential applications that require micro actuators. Important examples are techniques to efficiently move, sort, or mix small particles (e.g. cells in biotechnology applications); or micro positioning devices for inspection and assembly of complex micro systems (e.g. for display or amplifier arrays).

micro-robots
- Igor Paprotny and Bruce Donald with 1,000x scale models of our micro-robots
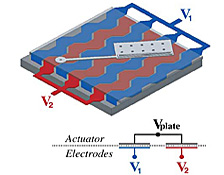
Power delivery
- A schematic of a capacitively coupled power delivery mechanism for untethered actuators.
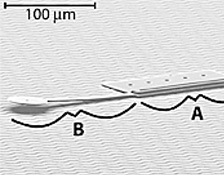
Electrostatic micro-robot
- The device consists of an untethered scratch drive
actuator (A), with a
cantilevered steering arm (B) that protrudes from one side.
Untethered Microrobots and Microassembly
- We use the term microrobot to denote mobile untethered MEMS robots with their dimensions strictly confined within a 1 mm3 cube. We have developed designs, theory and the results of fabrication and testing for a novel parallel microrobotic assembly scheme using muptiple stress-engineered MEMS microrobots. We have recently presented the results of experiments and testing of a first implementation of an untethered, multi-microrobotic system. We fabricated and tested 15 microrobots, and used these devices to implement a new type of planar microassembly.
Micromanipulation with biomimetic cilia arrays
- Distributed manipulation experiments were performed using a
massively-parallel, microfabricated actuator array. An organic ciliary array
of thin-film polyimide bimorph microactuators exploiting combined thermal
and electrostatic control was employed to implement sensorless manipulation
strategies for small objects. The tasks of parts-translation, -rotation,
-orientation, and -centering were demonstrated using small integrated
circuit (IC) dice.
The micromanipulation device (consisting of 4 quadrants of 8 × 8 motion pixels for a total of 256 microactuators) was connected to a PC via the parallel port. Micromanipulation strategies were programmed in a finegrained SIMD (single instruction, multiple data) fashion by specifying programmable force fields. When a part is placed on the device, the programmed vector field induces a force and moment upon it. The part's equilibrium states may be predicted and cascaded (using a sequence of fields) to bring the part to a desired final state.
The experiments suggest that MEMS actuator arrays are useful for parts-orientation, -posing, -transfer, -singulation, and -sorting. 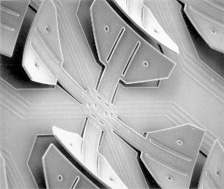
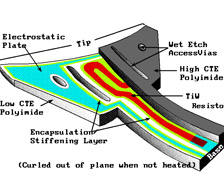
microactuator
- Organic thermal and electrostatic microactuator. Half of the upper polyimide and silicon nitride encapsulation/stiffening layer are shown removed along the cilium's axis of symmetry to show details. (Figure by John Suh.)
Polyimide cilia motion pixel
- Polyimide cilia motion pixel (SEM micrograph). Four actuators in a common center configuration make up a motion pixel. Each cilium is 430 µm long and bends up to 120 µm out of the plane. (Figure by Joh Suh.)
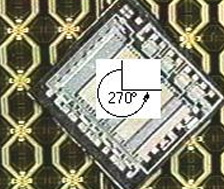
Rotating a square-shaped chip
- Rotating a square-shaped chip counterclockwise in a skewed squeeze field. In a skewed squeeze field, the forces do not point perpendicularly towards the squeeze line, but instead are symmetrically skewed. (Figures by John Suh.)
Single-crystal silicon actuator arrays
- We are also interested in applications and connections between MEMS and
biotechnology, particularly Structural Molecular Biology/Drug design.
The design of our actuators is based on microfabricated torsional resonators. They consist of rectangular grids suspended by two rods that act as torsional springs. They are fabricated in a SCREAM process (Single Crystal Silicon Reactive Etching And Metallization). When an AC voltage is applied between the grid and adjacent electrodes, the grid oscillates at resonance frequencies in the high kHz range. The edges of the grid reach deflections of several micrometers out of the substrate plane.
By introducing asymmetries into the resonator grid (such as placing the torsional rods off the center of the grid, or adding poles on one side of the grid) anisotropic lateral forces are generated, thus achieving a motion bias for the object on top of the actuator.
Each actuator can generate motion in one specific direction if it is activated; otherwise it acts as a passive frictional contact. The combination and selective activation of several actuators with different motion bias allows us to generate various motions in the plane. 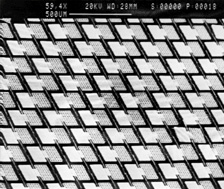
Small section of a SCS micro actuator array
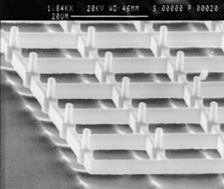
Actuator grid with 5 µm tips
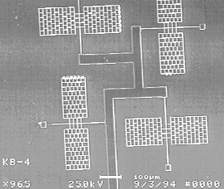
Micro motion pixel with 4 actuators