
- Offer Profile
- The Robotics and Mechatronics Center (RMC) is a cluster and DLR’s competence center for research and development in the areas of robotics, mechatronics, and optical systems. Mechatronics is the closest integration of mechanics, electronics and information technology for the realization of “intelligent mechanisms” which interact with their environment. The core competence of RMC is the interdisciplinary (virtual) design, computer-aided optimization and simulation, as well as implementation of complex mechatronic systems and human-machine interfaces. In the robotics community, the center is considered as one of the world leading institutions.
Robotics and Mechatronics Center
-
The Robotics and Mechatronics Center (RMC) is a cluster and DLR’s competence center for research and development in the areas of robotics, mechatronics, and optical systems. Mechatronics is the closest integration of mechanics, electronics and information technology for the realization of “intelligent mechanisms” which interact with their environment. The core competence of RMC is the interdisciplinary (virtual) design, computer-aided optimization and simulation, as well as implementation of complex mechatronic systems and human-machine interfaces. In the robotics community, the center is considered as one of the world leading institutions.
The application of technology and systems developed in the cluster are focusing primarily on the programmatic tasks in the research areas space, aeronautics, and transport. The developed technologies have direct impact and applications in other societal areas such as medical robotics, factory of the future, and personal robot assistance. Technology transfer is a major goal of RMC.
Structure
The Robotics and Mechatronics Center (RMC) is a cluster formed by three institutes with key research areas for inter-institutional cooperations.
The institutes are:- Institute of Robotics and Mechatronics (Director Dr. Alin Albu-Schäffer)
- Institute of System Dynamics and Control (Director Dr. Johann Bals)
- Institute for Optical Sensor Systems (Director Prof. Dr. Heinz-Wilhelm Hübers)
Key research areas

Space robotics
- Spaceflight is the incitement to develop advanced robotic systems within the Robotics and Mechatronics Center (RMC). Robots play a dominant role in the exploration and conquest of our outer space. Compared to human beings they can adapt much better to the extreme condi-tions encountered in free space and on celestial bodies like moons, planets or even asteroids. This enables robots perfectly to set up robotic outposts and hence to pioneer the interplanetary manned space flight. RMC has a long tradition in space robotics research and developments, specifically in near-Earth or orbital applications. Outstanding examples of great success are: ROTEX (1993), GETEX (1998) and ROKVISS (2003-2010). Worldwide, RMC has currently the most experience on this space robotics area.

Terrestrial assistive robotics
- One of the main goals of the highly intergrated robotic systems that are developed at the Robotics and Mechatronics Center is a seamless, semiautonomous integration with man, in which "soft robotics", i.e. the compliant and safe behaviour of a robotic system is central. These principles are key in the development of assistive and prosthetic devices. Novel, bimanual mobile production assistants will play a prominent role in developed countries production processes, while elderly care is of ever increasing importance. In this Key Research Area we study and approach these princinples from a human biological point of view.

Medical assistance systems
- In the interdepartmental research area of Medical Assistance Systems, findings in space and service robotics are reinterpreted and transferred to the field of medicine. Core technologies like efficient drives, mechatronics, telerobotics, sensors and planning systems are relevant to space applications as well as to technical systems in medicine. These technologies are researched and applied to the two main topics: medical robotics and active implants.

Flying robots
- The key research area Flying Robots covers the three main domains of the Robotics and Mechatronics Center – Aeronautics, Space Robotics, and Optical Information Systems – in order to exploit synergies in the development of robotics technologies for autonomous flying platforms. The spectrum of our work ranges from low-level control and sensor data processing to mission planning and execution. We have been working on general problems for autonomous systems taking into account special issues related to flying platforms and their applications.
Institute of Robotics and Mechatronics
-
Head of the Institute: Prof. Dr. Alin Albu-Schäffer
The long-term goal of our robotics activities has always been based on the idea of relieving man from inhuman and dangerous tasks. While in the early years of robotics in our department the main focus of interest has been restricted to designing robot sensors (and sensor-based man-machine interfaces) and closing smart sensory feedback loops, in the last years the activities have widened up considerably. Presently the general goal is the design of a new generation of multisensory light-weight robots for space applications which are operable by astronauts as well as from groundstations, based on powerful telerobotic concepts and man-machine-interfaces. This goal is characterized by a high degree of interdisciplinarity and consists of a few major task areas- Mechatronics - sensory and actuator developments
- Learning - adaptation and self-improvement
- Vision - real-time visual skills for intelligent robot control
- Telerobotics - remote control concepts for telecontrol, X-by-wire, and space
- Space Robotics - robotics space applications
- Medical Applications - robotics in medical applications
While in the early years of our robotic acitivities cooperation with terrestrial industry was predominant, the last 5 years have been characterized by close cooperation and contracts with space industry. The space robot technology experiment ROTEX - Europe's first active step into space robotics - was massively based on the concepts and systems developed here (multisensory gripper, local autonomy, telerobotic station); nevertheless in the future there will be considerable effort to transfer technology developed for space (e.g. light-weight concepts) back into terrestrial applications. 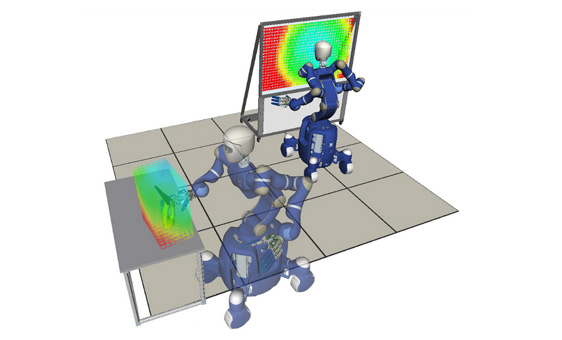
Autonomy and Teleoperation
-
The Department of Autonomy and Teleoperation works on the planning and execution of movements on multi-arm robotic systems with many degrees of freedom. The field of interest varies from simple motion primitives to the execution of complex manipulation tasks with robotic arms and hands.Fundamental techniques for programming and controlling robot motions on flexible, efficient and distributed computing platforms under hard real-time conditions are also investigated
Research topics include- Development of distributed, real-time computing platforms for robot control applications
- Integration of complex control strategies for compliant robots into applications and robot control structures
- Task oriented programming techniques for real-time and non real-time interfaces
- Concurrent Engineering process for control development on mechatronic systems
- Planning of robot motions with consideration of dynamic constraints.
- Application of non linear optimization techniques for reactive robot behaviours based on sensor information.
To increase the autonomy of robotic systems we investigate techniques to generate robot control programs from logical task descriptions. The DLR Rollin Justin is one of the main demonstration platforms for these tasks. To reach this goal, classes of basic robot operation have to be identified on different levels of abstraction, which allow automatic task and situation dependent parameterisation. Weuse model based techniques as well as programming by demonstration on the real robot or in virtual reality to build up representations of the environment where reasoning and decisions on the next operation can be autonomously done by the robotic system.
Mechatronic Components and Systems
-
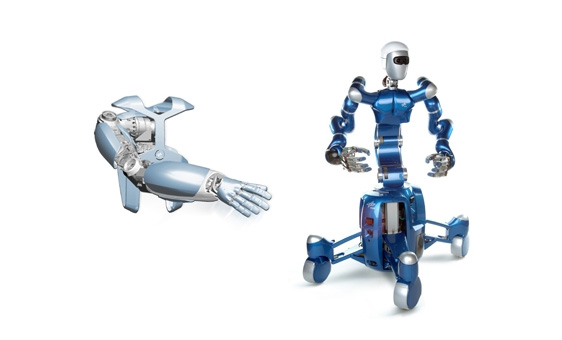
The department Mechatronic Components and Systems aims to build robots, which are able to support humans. This, in particular, applies to tasks that are dangerous or harmful for human beings. Hence, the development is focused on giving the robots the abilities needed to perceive their surroundings as well as to act safe and robust even in extremely harsh environments, as found e.g. in space or disaster operations. Consequently, the development concentrates on the robot as a complete system and its fundamental components: Sensors to perceive the environment, communication infrastructure to transmit the perceived data reliably and safe, as well as the actuators needed to execute the tasks of the robot in a safe way for both, the human being as well as the robot.
Research Topics- Development of complex robotic systems:
- Robot arms
- Robot hands
- Mobile manipulators
- Two- und multi-legged walkers
- Novel sensor and drive concepts
- Development of high-performance bus communication und data acquisition in robotics
- Novel locomotion concepts
The institute's robotic systems developed within the department are used by the entire institute in space applications such as "On-Orbit Servicing," "Robotic Space Assistance," and "Planetary Exploration."The mechatronic systems, components, and methods are applied in industry, medical robotics, and service robotics as well. These key technologies allow for extreme light-weight design, system integration, and power density and therefore enable flexible mobility as well as dexterous, compliant, and safe interaction with their environment. Typical fields of application are complex manipulation and assembly tasks and robotic assistance with physical human robot interaction as well as tele-operation.
Perception and Cognition
-
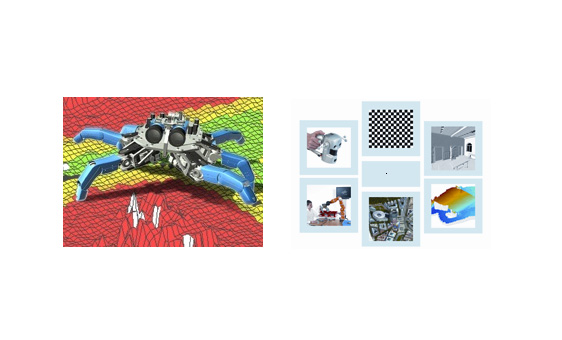
The Department of Perception und Cognition develops solutions to enable a wholistic
perception of robotic systems using the two predominant robot senses vision and tactility.
Perception and cognition are elementary components for tele operated, and autonomous robot systems, due to the fact that they enable reactive behavior, attention-based control and interpretation of situations.
The research areas cover- Innovative sensor concepts
- Sensor data processing and analysis in realtime, e.g. stereo reconstruction, object tracking, and 3D-reconstruction
- Optical navigation and localization of mobile, autonomous systems
- Processing and analysis of EMG and forcetorque data
- 3D environmental modeling using point-, volume-, and surface-based representations and derived functional models
- Generation of digital terrain models and fusion of 3D-models of different dimensions
- Data fusion, data classification and learning algorithms
- Object recognition, pose estimation and scene interpretation
- Real-time 3D-visualisation of large data sets, e.g. terrain rendering, augmentation and auto stereoscopy
The development of integrated solutions for robotic perception from the data acquisition
to the application is a core competence of the department. Sensor-based applications such
as tactile and visual exploration and navigation, photo realism, further augmentation of real
scenes for tele robotics as well as derivation of solutions for automation in the
industry are research topics. The methods for data interpretation and task-oriented
scene comprehension are based on the modeling process and allow for efficient exploration
for different missions in space, aerospace and terrestrial scenarios.
The department is networked worldwide as part of national and international cooperations.
Additionally, close industrial contacts exist, accounting for the increased industrial demand
for intelligent sensor data processing.
Analysis and Control of Advanced Robotic Systems
-
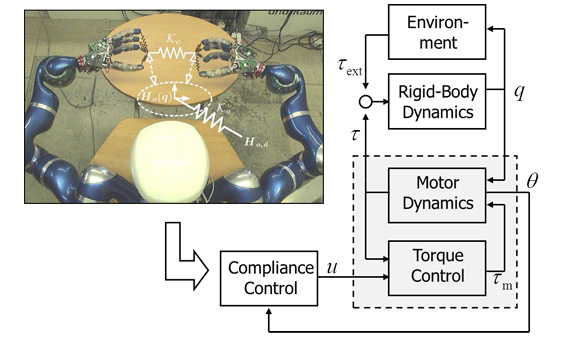
The Department of Analysis and Control of Advanced Robotic Systems develops solutions for realizing a desired closed loop behavior in advanced robotic systems. This includes in particular the high-performance motion generation, manipulation, locomotion, and interaction with humans and the environment, as well as the control oriented system analysis.
Research Topics- Nonlinear control in robotics
- Force and impedance control
- Compliant control of torque controlled robots
- Control of elastic robot systems
- Modeling, simulation, and identifikation in robotics
- System analysis and dynamics of complex robotic systems
- Biologically inspired control
- Safe human-robot interaction
- Telepresence
- Virtual reality and haptics
- Visual servoing
- Grasp control and manipulation
- Locomotion
These research topics are essential basic components for the robot systems developed at the Institute of Robotics and Mechatronics and are necessary for the higher level cognitive skills and task-oriented planning methods developed at the Departments of Autonomy and Teleoperation and Perception and Cognition. In close interdisciplinary collaboration with the Department of Mechatronic Systems and Components, the department contributes to the design, specification and implementation of novel mechatronic drive concepts and robotic systems. Target is a cyclic development process by iterative simulation, hardware development, deployment and control of components and systems. The Department of Analysis and Control of Complex Robot Systems contributes in particular the topics modeling and simulation, as well as identification and control. Besides stationary robot systems, mobile systems such as mobile manipulators and free-flying robot systems represent important application areas. The analysis and control of time delayed systems, such as those arising from from telepresence applications, are of great importance for terrestrial as well as for space applications.
Research : Institute of Robotics and Mechatronics
Bionics
-
The abilities of humans provide both a goal and inspiration, for the development of robotic systems. We try to understand these abilities to meld them into technical systems and to assist the human in various settings. In order to understand the human “model”, we acquire bio-data like muscle activity, exerted forces, and performed motions by recording different measures, e.g., electromyography (EMG) and ultrasound. This data can expose very different sets of information, including the behavior of the subject, his intentions, or abilities. Our goal is to process the data in a manner that lets us extract the information of interest. Once the information is extracted we can use it for different purposes.
On the one hand, we want to build and optimize technical systems that—under a specific focus—show performance similar to the human, an example being bi-articular muscles allowing an enriched capability to control arm position, force and stiffness. On the other hand, we want to use the decoded information as control commands for robotic systems. With this approach we focus on the control of prosthetic hands, assistive robotic arms for people with limited upper limb function, and the control of robotic devices for post-stroke rehabilitation. 
Assistive robotics
-
For many people with upper limb disabilities, simple activities of daily living, such as drinking, opening a door, or pushing an elevator button require the assistance of a caretaker. An assistive, robotic system controlled via a Brain-Computer-Interface (BCI) could enable these people to perform these kind of tasks autonomously again and thereby increase their independence. We investigate various methods to provide disabled people with control over the DLR Light-Weight Robot, while supporting task execution with the capabilities of a torque-controlled robot.
In our research we mainly investigate the following two interfacing techniques.
1. On the one hand we investigate the use of surface electromyography (sEMG) as a non-invasive control interface e.g. for people with spinal muscular atrophy (SMA).
2. For people with more severe disabilities, e.g. after spinal cord injury or stroke, we investigate the use of cortical interfaces, which record neural activity directly from the brain, based on the Braingate2 Neural Interface System developed at Brown University. In our collaborative study, a participant was able to control the robotic system and autonomously drink from a bottle for the first time after she suffered a brainstem stroke 15 years earlier.

Human—machine interfaces for prosthetics
-
How can people with disabilities properly control a prosthetic, assistive or rehabilitation device? What do we mean by properly control? Can we achieve that at low-cost, portable, wearable, online? To answer these questions, we are working in the field of Peripheral Human-Machine Interfaces with the aim of improving the control of prosthetic robotic devices in a non-invasive and realistic way, thereby aiding people with disabilities to regain lost hand/arm functionality without the stress of surgery, drugs, hospitalisation
and so on.
We aim at re-establishing the sensori-motor loop with the missing / injured limb. This includes feed-forward control (detecting the movement intent of the patient) and sensory feedback (transducing data to sensation). To achieve this, we study various non-invasive human-machine interfaces (surface electromyography, ultrasound, tactile and optical sensing for feed-forward control, and investigate innovative ways of delivering sensory feedback such as, e.g., the application of force / vibration / electrical stimulation to the patient’s body.
Imaging EMG (iEMG)
- We do not only exploit bio-data, but we are also working on improving methods for bio-data acquisition. Currently surface EMG only offers a very coarse view of muscle activity as it can merely record a summation of the signals of different muscle fibers. We are working on a 3D-reconstruction method of the generating potentials to see which muscles are active during a specific motion. Exploiting the crosstalk between the electrodes in large electrode arrays, we want to recover the muscle potentials of "muscles beneath muscles". Thereby, we gain a better understanding of action potentials within deeper muscular regions. Yet, we do not require invasive technology, like needle EMG. We call this method imaging electromyography, or in short: iEMG.

Rehabilitation robotics
-
Each year approximately 15 million people worldwide suffer stroke for the first time. The neurological injury often leads to persisting paresis or paralysis in patients. Regaining control over their own limbs and thus maintaining independence from other people is only possible through frequent and
repetitive training.
Our goal is to provide self-adjusting robots for physiotherapy of the upper limb. Through impedance control we can adjust the allowed deviation from the targeted path of motion. Thereby we can ensure “repetition without repetition” (Bernstein 1967), fostering neural plasticity and thus learning. Using different force patterns, e.g. assisting and resisting force, the training can be adjusted to the individual needs of the patient. Possible adjustments range from the type of training exercise to the variation of robotic support.
By observing the EMG-signals on the impaired arm, we can detect desired motion before the subject regains enough strength to execute it. Therefore, we can ensure that the patient is actively participating in the training and perform quantitative analysis of his progress. Moreover, we want to identify the areas in the workspace that need more training by analyzing the EMG and thus automatically adjusting the exercises, e.g. by focusing on specific areas of the human workspace.
Robot Hands
-
Our experience in developing, building and using dexterous robot hands reaches back to 1993. Our work scope covers all areas from multisensory mechatronic hand design up to control of the hands including telemanipulation, autonomous grasping and manipulation. As example the DLR Hand II basing on four identical fingers was rated as one of the most advanced and complex artificial hands in the world at it is introducing in the year 2001.
It is the base for the DLR Hit Hand I and II. In the year 2008 we introduced the DLR Hand-Arm-System - it is still the most complex mechatronic hand with 38 motors and 19 degree of freedoms in the world. With it size and performance approaching the human archetype it is unique. It mirrors our experience with tendon driven passive compliance systems. Our last development is the space hand called DEXHAND. It combines the modular hand concept of DLR Hand II with tendon driven fingers to reach fingers sizes of Astronaut gloves and still has the same active fingertip force as DLR Hand II. 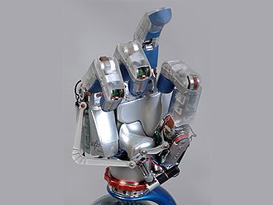
HAND II
- The DLR Hand II is an anthropomorphic dexterous grasping and manipulation system. The hand consists of four identical fingers with four joints and three degrees of freedom each. An additional degree of freedom in the palm allows the hand to adjust perfectly for either stable grasping or fine manipulation. Complete integration of the actuation system, the sensors and the communication electronics in the hand leads to maximum flexibility and allows easy interfacing to different robots. Numerous sensors allow the precise control of the hand parallel to a very sensitive feed-back of forces and finger positions. This is the prerequisite for dexterous telemanipulation. Similar to a human acting with her hands, very different a priori unknown objects have to be grasped and manipulated and various tasks have to be accomplished in an unknown environment.

HIT HAND
- The DLR HIT HAND II from HIT(Harbin Institute of technology) and DLR Institut for Robotics and Mechatronic is further stage of the DLR HIT HAND I. In contrast to the DLR HIT Hand I the new DLR HIT Hand II has five modular fingers with four joint and three active degrees of freedoms and is still lighter and smaller. As the DLR Hit Hand I in the year 2007 the DLR Hit Hand II was awarded with the IF-Design-Award 2009. The Hand is used on Space Justin setup for grasping objects with shared autonomy. The shared autonomy supports the human tele manipulator during for example space operations with autonomous grasp planning. Main topic on the hardware research is to use the Hit Hand II Fingers for Reconfigurable Dexterous ReDex series endeffectors and to build Human machine interface (HMI) based on modular fingers.
DEXHAND
- In the next years a lot of satellites will reach the end of their life circle. To repair them astronauts are too expensive and the EVA operation are dangerous.. While robotic systems are not yet ready to replace humans, they provide an excellent support for astronauts during maintenance and hazardous tasks. Under control of a tele-manipulation system the robotic systems could replace most of the Extra Vehicular Activities (EVA). For these issues the DEXHAND was developed. It is designed to use and manipulate most of the astronauts EVA-Tools. The experience of the Hand II design and the tendon driven Hand-Arm-System Hand paired with ROKVISS heritage leads to the DEXHAND design. Ongoing research on DEXHAND is space qualified hand design and software design.

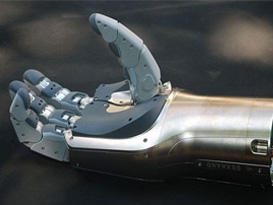
Hand of Hand-Arm-System
- In contrast to our other robot hands, this hand has no sensors and actors in the hand. The actors and sensors are located in the forearm of the handarmsystem. This allows building a hand with the size and dexterity of a human. Every joints is actuated human like by two motors. The hand can control its position and its passive joint stiffness simulatneously with an nonlinear spring mechanism coupled to the tendons. The decoupling from the gear and output makes it very robust against hits and allows the system to run stable with low controller frequencies. The system is used to compare different tendon couplings and degree of freedoms. Furthermore dynamic grasping combined variable stiffness is explored.
Hand Arm System
Hand Arm System
-
As robotic systems and applications become more and more complex, the danger of costly damage to robots increasingly distracts developers from the important work of developing even radically different motion control and planning strategies. Furthermore the dynamic properties of current robotic systems are not sufficient for human tasks such as throwing or running. Typical actuators cannot provide the required power during peak loads without getting too bulky and heavy. Therefore, we are convinced that major steps in space and service robotics are only possible if future robotic systems are:
- Robust against “every-day” impacts
- Able to store energy on short-ter
Mechatronics
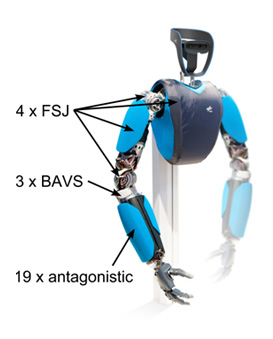
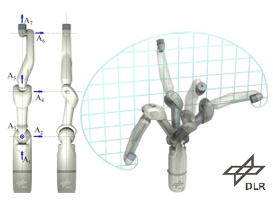
The DLR Hand Arm System is an anthropomorphic robot developed at DLR using variable stiffness actuators (VSA). It is intended to approach its human archetype in size, weight, and performance. The focus of the development is on robustness, high dynamics, and dexterity.
Control
The DLR Hand Arm System is a scientific platform to experimentally investigate control methods for variable stiffness robots. The focus of the controller design includes active vibration damping, stiffness control, optimal, and cyclic motion control. Analysis and control of robotic arms and hands are treated.
Medical Robotics
-
In the last decades robotics and mechatronics have found their way into many medical applications. Especially surgery has shown large potential for the use of robotic systems. The goal in medical robotics is thereby not to replace the surgeon by a robot, but to provide the surgeon with new treatment options to the benefit of the patient. Although this technology is still in its early stages, it will considerably change future surgery.
Since more than 15 years the Institute of Robotics and Mechatronics contributes to this process with various research activities. The successfully completed projects include among others the implementation of a robot-assisted endoscope guidance (1996 - 2008), the development of the ventricular assist device (VAD) DLR Heart (2002 - 2004), which was licensed by DUALIS MedTech GmbH, and the development of the versatile surgical robot DLR KineMedic (2002 - 2007) in cooperation with Brainlab AG. 
MiroSurge - Telemanipulation in Minimally Invasive Surgery
- Conventional minimally invasive surgery (MIS) is performed through small incisions in the patient’s skin, preserving healthy tissue. The surgeon works with long slender instruments and is separated from the operation area. This arrangement challenges the surgeon’s skills due to lost hand-eye coordination and missing direct manual contact to the operation area. Therefore, many sophisticated procedures still cannot be performed minimally invasively. To overcome the drawbacks of conventional MIS, telepresence and telemanipulation techniques play an important role: In case of minimally invasive robotic surgery (MIRS) the instruments are not directly manipulated anymore. Instead, they are held by specialized robot arms and remotely commanded by the surgeon who comfortably sits at a master console. The surgeon virtually regains direct access to the operating field by having 3D endoscopic sight, force feedback, and restored hand-eye coordination.
MIRO - Versatile Robot Arm for Surgical Applications
-
The DLR MIRO is after the KineMedic the second generation of versatile robot arms for surgical applications, developed at the Institute of Robotics and Mechatronics. With its low weight of 10 kg and dimensions similar to those of the human arm, the MIRO robot can assist the surgeon directly at the operating table where space is sparse. The scope of applications of this robot arm ranges from guiding a laser unit for the precise separation of bone tissue in orthopaedics to setting holes for bone screws, robot-assisted endoscope guidance and on to minimal invasive surgery.
Surgical robotic systems can be divided into two major groups: specialized and versatile systems. Specialized systems focus either on a dedicated surgical technique or on the treatment of a specific medical disease. In contrast, the design approach of the DLR MIRO and its antecessor KineMedic aim at a compact, slim and lightweight robot arm as a versatile core component for various existing and future medical robotic procedures.
By adding specialized instruments and modifying the application workflows within the robot control, the MIRO robot can be adapted to many different surgical procedures. This versatility has been achieved by the design of the robotic arm itself and by the flexibility of the robot control architecture.

MICA - Actuated and Sensorized Instruments for Minimally Invasive Surgery
-
The DLR MICA is the second generation of versatile instruments for minimally invasive surgery developed at the Institute of Robotics and Mechatronics. This interventive instrument is coupled to the MIRO arm for minimally invasive procedures. MICA is a 3 degrees of freedom (DoFs) robot, which – in the MiroSurge scenario – is combined with the 7-DoF robot MIRO. Therewith, MICA adds the joints 8, 9 and 10 to the telemanipulator. It consists of a drive unit, a tool interface and the task specific tool with its shaft and end-effector.
Various tools targeted at different surgical applications can be used with the MICA drive unit, differing in the number of DoFs, functionality of the end effector, and range of motion. Propulsion for the tool is provided by means of 3 linear motions transmitted through a tool interface between drive unit and tool. The tool interface provides suitable propulsion scaling for the tool as well as standardized digital communication with any sensors located in the tool, such as the DLR force/torque sensor. In the present configuration the tool is comprised of a 2 DoF wrist, gripper and 7 DoF force/torque sensor, providing dexterous manipulation and haptic feedback from the operation site. However, tools range from grippers over scissors to needle holders in minimally invasive surgery.

Robotic Waterjet Surgery
-
In waterjet surgery a thin and high pressure waterjet is used to prepare soft tissue. This method was first presented in the British Journal of Surgery by Papachristou and Bartes as "Resection of the liver with a waterjet" in 1982.
There, the selective aspect which is the main advantage of the waterjet method is introduced. Soft tissue as e.g. parenchyma is washed away whereas structures with a higher mechanical resistance against the waterjet impact like nerves and vessels remain intact. This leads to less interoperative loss of blood and less parenchymal trauma. These effects have also been acknowledged by various other publications.
Another advantage of the method is that the cell structures at the borders of the cut stay intact since there is no thermal damage.
In open surgery preparing soft tissue by waterjet is a repetitive process as only few cell layers are washed away when moving the waterjet over the tissue. This results in the requirement that the waterjet has to be moved continually during the preparation process. The movement is quite easy to perform in open surgery but is very difficult in minimally invasive interventions due to the kinematic restriction given by the trocar.

Intraoperative Detection of Arteries Using Ultrasonic Sound
-
Minimally invasive robotic surgery (MIRS) entails total absence of haptic feedback due to the spatial separation of patient and surgeon. In conventional surgery, however, palpation to detect superficial arteries by a slight pulsation is an important, commonly applied, and security-relevant procedure. Therefore, a new approach is presented, focusing on the intra-operative detection of arteries hidden under covering tissue. The objective is to minimize the risk of an accidental dissection of sub-surficial vessels and, thereby, unintentional arterial bleeding. The system is intended to expand the existing DLR MIRS scenario providing kinesthetic feedback. It is based on a new, unidirectional ultrasonic probe.
Its measurement data are processed to convert the expected palpable pulsations to soft kinesthetic impulses. These are presented on a haptic interface.
Human-Centered Robotics

Human-Centered Robotics
-
Bringing robots into our everyday professional and personal life for close coexistence, interaction, and collaboration needs holistic design, control, and planning concepts that place the human as their central design premise. The field of Human-Centered Robotics aims at developing solutions to safe, intuitive, and dynamic robot action and interaction of man and machine.
We conduct research in the fields of- Safety in Human-Robot Interaction
- Reflex and interaction control
- Real-time motion planning
- Task and interaction learning
- Real-time task planning
- Intuitive and safe robot programming
- Human-Robot Interaction
Mobile Robots
-
The exploration of other planets is an important domain for mobile robotic systems. On Earth, mobile robots can help for search and rescue tasks, by quickly delivering images and maps for assessing critical situations without putting humans into danger. Common in both domains is the need to move and navigate the systems in unknown, rough environments without relying on external infrastructure. In space exploration, some level of local autonomy is required for coping with high communication latencies. In disaster scenarios, local autonomy relieves rescue workers from low level control. Furthermore, using several cooperating systems supports efficiency and fast response.
We are working on multicopers, rovers and crawlers for these scenarios. All systems use stereo vision and Inertial Measurement Units (IMUs) as sensors, create 2.5D or 3D maps and perform on-board path planning and navigation. Thus, our flying as well as ground based systems are capable of autonomous navigation to user defined target points, through unknown, rough terrain and without using GPS.
Ongoing work includes the cooperation of multiple autonomous robots. The aims are to complement skills in a heterogeneous team (e.g. driving and flying) and to increase robustness and reduce mission time using a homogeneous team. In any case, each mobile system is able to fulfill its job on its own, without depending on other systems, a central station, communication link, etc.The exploration of other planets is an important domain for mobile robotic systems. On Earth, mobile robots can help for search and rescue tasks, by quickly delivering images and maps for assessing critical situations without putting humans into danger. Common in both domains is the need to move and navigate the systems in unknown, rough environments without relying on external infrastructure. In space exploration, some level of local autonomy is required for coping with high communication latencies. In disaster scenarios, local autonomy relieves rescue workers from low level control. Furthermore, using several cooperating systems supports efficiency and fast response.
We are working on multicopers, rovers and crawlers for these scenarios. All systems use stereo vision and Inertial Measurement Units (IMUs) as sensors, create 2.5D or 3D maps and perform on-board path planning and navigation. Thus, our flying as well as ground based systems are capable of autonomous navigation to user defined target points, through unknown, rough terrain and without using GPS.
Ongoing work includes the cooperation of multiple autonomous robots. The aims are to complement skills in a heterogeneous team (e.g. driving and flying) and to increase robustness and reduce mission time using a homogeneous team. In any case, each mobile system is able to fulfill its job on its own, without depending on other systems, a central station, communication link, etc. 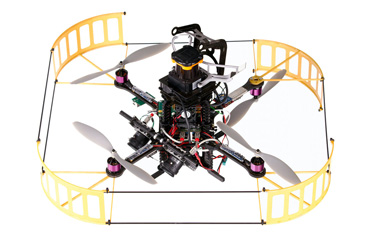
Multicopters

Rovers

Rovers
Optical Sensors
-
Sensors are crucial in robotics. The sensors developed at the RMC are taylored to the rising demands of complex robotic applications. Different tasks like exploration, autonomous 3D-modelling or navigation need versatile and robust visual perception. Therefore the multisensory 3D-Modeller (DLR 3DMo) with stereo cameras, laser scanner and laser stripe profiler as well as later the novel laser scanner VR-SCAN were developed.
Sensors are crucial in robotics. The sensors developed at the RMC are taylored to the rising demands of complex robotic applications. Different tasks like exploration, autonomous 3D-modelling or navigation need versatile and robust visual perception. Therefore the multisensory 3D-Modeller (DLR 3DMo) with stereo cameras, laser scanner and laser stripe profiler as well as later the novel laser scanner VR-SCAN were developed.

DLR VR-SCAN
-
A Versatile and Robust Miniaturized Laser Scanner for short range 3D-Modelling and Exploration in Robotics
Precise and robust perception of the environment is crucial for autonomous robot systems. Various robotic tasks demand versatile perception. The DLR VR-SCAN is a dedicated design of a versatile triangulation based laser range scanner optimized for autonomous 3D-modelling and exploration in robotics.
The laser scanner design is based on an extremely small MEMS scan head permitting a compact, lightweight and highly integrated implementation allowing for hand-eye operation. Special capabilities like variable range and confidence rating of the measuring values increase robustness and versatility.

The DLR Multisensory 3D-Modeller (3DMo)
-
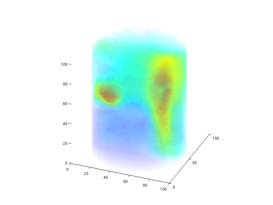
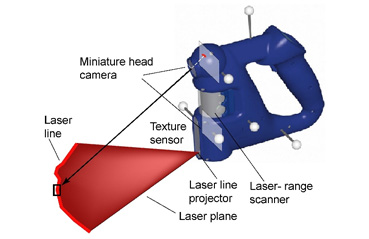
A “Multisensory 3D modeller” was developed to evaluate different sensor principles and sensor fusion for the generation of photorealistic 3D models. The Modeller can be used hand-guided or automated on a robotic system. Thus, robots should be able to build a photorealistic model of their environment by moving around an end effector equipped with different sensors (a so-called Eye-in-Hand system)
The 3d-Modeller consists of a core module and application specific extensions. The core module, hereafter simply called modeller, comprehends two digital cameras, a miniaturized rotating laser scanner and two line laser modules. Furthermore it carries a small embedded computer to provide internal computing power, and a graphical colour display. The modeller can be connected to a handhold with various input buttons or to a robot via an industrial quick changing adaptor. On the sides markers are adaptable for optical pose measurement.
Laser-stripe Profiler
-
The fundamental principle of range sensing by optical triangulation is illustrated in this figure. A focused plane of laser light illuminates a stripe on the surface of an object. A video camera (in our case without optical filtering) records its reflection. 3-D reconstruction is performed by triangulation, intersecting the laser plane with the rays of sight corresponding to the laser stripe projection in the image frame.
Note that this principle of operation is very much alike the one of stereo-vision systems. A laser plane is used instead of a second camera in order to simplify the correspondence problem. In this way, the major obstacle for using stereo vision in 3-D modeling at high-rate -- the computational requirements -- can be overcome.
Rollin' Justin

Rollin' Justin
-
In the future humanoid robots are envisioned in household applications as well as in space environments. The capability to carry out complex manipulation tasks is a key issue. The mobile humanoid robot Rollin' Justin is utilized as a research platform for autonomous dexterous mobile manipulation in human environments.
The compliant controlled light weight arms and the two four-fingered hands of the robot make it an ideal experimental platform for these research issues. The mobile platform allows the long range autonomous operation of the system. The individually movable, spring-borne wheels match the special requirements of Rollin' Justin's upper body during manipulation tasks. Motion sensing sensors and stereo cameras allow the 3D reconstruction of the environment of the robot. Unstructured, variable and dynamic environments require a robot to act based on the given situation without human intervention. On the other hand, cooperating with a human is sometimes the only way to solve a certain task.
Telepresence & VR

Telepresence & VR
-
How to repair satellites, deep sea mining sites or nuclear plants without endangering humans? By using remotely commanded robots, or telerobotic technology. A human operator can command such a robotic system while being in a safe and comfortable place. Robots can be built to be more robust to hazardous environments making it
- less risky for the expert,
- cheaper to get on site in most cases, and
- even more reliable and more precise.
One particularity of our approach is haptic feedback, which lets the human operator precisely feel and control the interaction forces between remote robot and the environment leading to a natural manipulation. This feedback enables to cover a wide range of manipulation tasks, from powerfully switching levers to precisely turning screws, or even handling fragile electronics parts. We started with On-Orbit Servicing as target application, but the developed technology can and is also be applied to various terrestrial applications, such as maintaining industrial plants, oil platforms or minimally invasive robotic surgery.
Space Robotics
Space Robotics
-
In DLR`s programmatic structure space robotics is a so-called core topic within the program theme “technology for space systems”. This core topic is basically subdivided into the following areas and “internal projects”:
Space robotics will become a key technology for the exploration of the outer space and the operation and maintenance of space stations, satellites and other platforms, saving costs and relieving man from dangerous tasks.
Because it is clear that there is no way to jump from zero experience to a fully operational, complex space robot system, we had proposed and realized ROTEX, the first remotely controlled space robot. The ROTEX system, that flew with shuttle COLUMBIA in April 93, successfully demonstrated that the main operational modes, important for space robots are tele-programming, sensor-based and shared autonomy, and on-line tele-operation from ground despite several seconds delay.