
- Offer Profile
An der Freien Universität Berlin wird das Institut für Informatik von verschiedenen Arbeitsgruppen repräsentiert, die ein breites Spektrum zwischen Kern-informatik und Angewandter Informatik vertreten. Alle Arbeits-gruppen weisen in ihren Projekten einen starken Anwendungsbezug auf, die inhaltlich vielseitig aus-gerichtet ist. Diese Vielfalt wird ermöglicht durch die Einbezieh-ung zahlreicher außeruniversitärer Kooperationspartner. An wissen-schaftlichen Institutionen sind hier vor allem das Zuse-Institut Berlin und das Max-Planck-Institut für molekulare Genetik zu nennen. An Projekten, die durch EU und BMBF gefördert werden, sind sowohl universitäre als auch außer-universitäre Partner beteiligt.
Die Arbeitsgruppe Künstliche Intelligenz, unter der Leitung von Prof. Dr. Raúl Rojas, beschäftigt sich mit folgenden Themen:
- Autonome Fahrzeuge
- Autonome Robotik (z.B. Fussballroboter)
- Humanoide Roboter
- Intelligente Multimedia-Assistenten
- Intelligentes Haus
- Lesegerät für Blinde und Sehbehinderte
- Mustererkennung für Handschrifterkennung
- Mustererkennung, speziell für Computervision
- Roboterbiene
- Zentrum für Digitale Medien
- Konrad-Zuse Internet-Archiv
AutoNOMOS Car Project!
- Since 2006 the team around Prof. Dr. Raúl Rojas of the
Freie Universität Berlin has been developing autonomous cars. Having reached
semi-finals of the DARPA Urban Challenge 2007, we improved our research with
funding by the German ministry of science.
We are now working on a modular system for the operation of autonomous or semi-autonomous cars, as for our first prototype Spirit of Berlin. Besides we develop several smart applications demonstrating unprecedented aspects of modern transportation and communication technologies. For further information, please go into the technology topics.
Autonomous Cars
- Technology is rapidly converging so that autonomous
cars will become a reality in a few more years. Most high-end vehicles have
now a myriad of microprocessors connected through a CAN or optical bus. The
important actuators in such vehicles can be controlled using computers
(brake-by-wire, steer-by-wire, etc.). Errors can be diagnosed reading data
stored in the controller’s memory. Cars have evolved to become robots, but a
human is still at the wheel.
Building a safe autonomous automobile requires advances in the fields of computer vision, external perception (radar or laser scanning), global localization with and without GPS information, drivers models, vehicle dynamics, learning algorithms, and many more.
The development of autonomous vehicles will be an evolutionary process, with driver assistance systems being introduced initially to help humans drive more comfortably and safely. Adaptive cruise control, automatic parking, collision warnings, are just some of the technologies already available. New technology will emerge from robotic competitions such as the Urban Challenge.


Team Berlin
- Our team is a joint team of researchers and students
from Freie Universität Berlin, Rice University, and the Fraunhofer Society.
The team leader, Prof. Javier Rojo, is a faculty member at Rice. Our second
team leader, Prof. Raúl Rojas, is faculty member at Freie Universität
Berlin, and also at Rice University during 2007. The rest of the team is
composed of graduate and undergraduate students from FU Berlin, as well as
two researchers from the Fraunhofer Society in Sankt Augustin.
Team Berlin was started in 2006, after a three month visit of several of our team members to Stanford University. We worked in the group of Prof. Sebastian Thrun, where we had the rare opportunity of witnessing first hand the development of Stanford’s entry to the Urban Grand Challenge. The members of the Stanford team were very helpful and gracious in providing us information, technical documents, and all needed help in order to start our own team.
At Freie Universität Berlin we have been building autonomous robots since 1998. Over the years, we built several generations of robots which took part in the annual RoboCup (robotic soccer) competitions. Our team, the FU-Fighters, won twice the World Championship in the small-size league (robots up to 18 cm in diameter), and once second place in the middle-size league (autonomous robots up to 50 cm in diameter). We dominated the European competitions over several years, winning five times the European championship.
In 2006 we decided to build larger robots, grounding the development in our experience with fast autonomous robots controlled by laptops, and with their own computer vision. We decided to take part in the Urban Grand Challenge – as the name implies, a new robotic challenge for us. Our decision was based also on a consideration of the areas in which autonomous robots could play a role in the not so distant future. By coincidence, the Berlin police department approached us at about the same time, asking us to develop a security robot for large warehouses and enclosed areas (such as abandoned airports). An autonomous car seemed to be the best solution and seed funding from the university was granted for the project.


Technology: Spirit of Berlin
- The Spirit of Berlin is an autonomous vehicle that has been designed and built by the Artificial Intelligence Group at Freie Universität Berlin as of 2007. It is a car that can be driven without a driver. A conventional car (Dodge Grand Caravan, 2000) was equipped with sensors, computers, and actuators. The sensors collect information about the immediate environment. Using this information, the software on the computers selects what to do. The resulting action is then implemented with the help of mechanical actuators.
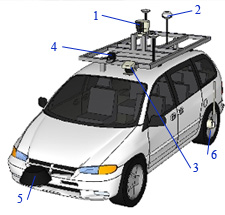
Hardware
- 1. omnidirectional laser
2. GPS
3. far-range laser
4. camera
5. wide-range laser
6. Odometer

Omnidirectional laser
- The Velodyne HDL-64E is an omnidirectional laser, involving 64 beams on the top of the car. It rotates at up to 15 Hz. So it's able to detect obstacles within a range of 30 meters, why we use it to control the car's behaviour at crossings.

GPS
- The GPS (Global Positioning System) provides the position determination with a precision of 1m up to 0.1m by using Differential GPS.

Far-range laser
- The Sick Laser is a far-range laser with an aperture angle of 120°. At an angle of 20° to the street it's used to detect the curb.

Camera
- We use a camera and algorithms of image pattern recognition to recognize and classify sundry objects and its characteristics.

Wide-range laser
- An Ibeo Alasca Laser serves as a wide-range laser. Its 4 separate laser beams allow the detection of obstacles within a range of up to 200 meters off the car, at an angle of 220°.

Odometer
- We separately use an Odometer for calculation of the reclined route.
Technology: eyeDriver
- Only a couple of month after the release of iDriver,
an application created by AutoNOMOS labratories and Appirion UG to control
and drive the autonomous car Spirit of Berlin, the latest prototype for
alternative motoring is released in cooperation with SensoMototric
Instruments (SMI).
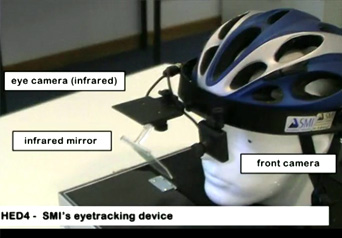
The eyeDriver software is a solution that enables the driver to steer a car using their eye only.
Following the huge press coverage of iDriver, SMI provided the Free University of Berlin with their latest eyeTracking-Device, the HED4. The eyeDriver software interpretes the gaze-direction of the driver, which is supplied by the HED4, to adjust the steering wheel of the Spirit of Berlin accordingly.
Two modes for running eyeDriver are supported: Freedrive and Routeselection.
In Freedrive-Mode, the gaze-direction is linked with the steering wheel. The more the driver looks to the left or right, the more the steeringwheel is moved to that direction. That way, the driver will always steer the car towards his current focus, making it easy to follow other objects like cars or pedestrians without using any other body part than the eyes.
The Routeselection-Mode is designed as a user interface for the autonomous car Spirit of Berlin, giving the passenger at certain waypoints (like crossing for example) the option to choose the next route. The car will drive along the chosen route by its self until the next waypoint is reached.

Technology: iDriver
- While being engaged in the development and design of
Made in Germany, the soon to be released brand new autonomous car, the
researchers from AutoNOMOS laboratories were approached by the software
engineers from Appirion UG. Combining their expertise, they developed the
highly anticipated iDriver, the first ever application which lets you
remotely control a vehicle. The media buzz created can be followed here.
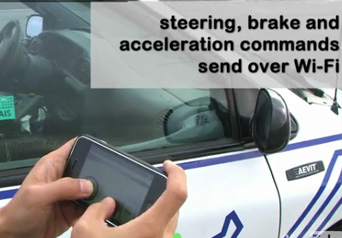
Currently, iDriver is running on the widely known iPhone 3GS, a top of the line smartphone with an easy to use touch interface, built in GPS and acceleration sensors. The application is able to control the main components of Spirit of Berlin, the team´s autonomous vehicle, which enables the user to drive the car "James Bond style" with its mobile phone while being in, outside or on top of the car. At the same time the phone is transmitting the control input towards the onboard computer, a live video feed from the car´s built in camera is received to enhance the driving sensation.
Being able to demonstrate that a real life remote controlled car is a feasible and exciting way to control a vehicle opens a wide field of possible playgrounds to be developed. The following video shows all the action happening at the Tempelhof Airport testing grounds. Enjoy!
Technology: Made in Germany
- The Urban Grand Challenge provided a lot of insight on
the current research status of unmanned vehicles and the development of
future autonomous cars. Technology is rapidly converging so that autonomous
cars will become a reality in a few more years. Most high-end vehicles now
have a myriad of microprocessors connected through a CAN or optical bus. The
important actuators in such vehicles can be controlled using computers
(brake-by-wire, steer-by-wire, etc.) while errors can be diagnosed by
reading data stored in the controller’s memory. Cars have evolved to become
robots, yet a human is still steering at the wheel.
The research at the Freie Universität Berlin will continue in 2010 with a brand new car (a VW Passat, transient name: FU-X "Made in Germany") to meet the challenges of unmanned driving side by side with human road users. The goal will be to develop a robust middleware system for unmanned vehicles so that they can navigate autonomously in daily road traffic. Additionally, economic potential for unmanned vehicles will be studied to develop autonomous solutions for special business cases.
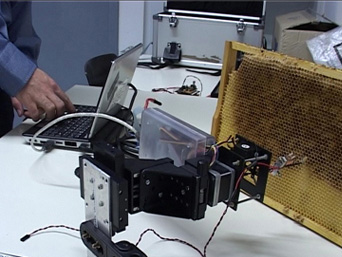
RoboBee
- We are currently developing a robotic bee to imitate the dances of european honey bees (Apis mellifera).
The Bee Dance
- Karl von Frisch (1946) discovered that a highly stereotyped -still variable- motion pattern that honeybees perform on the comb surface conveys to a human observer the circular coordinates of relatively well-defined locations. The term ‘waggle dance’ denotes a form of this pattern which conveys information on targets located fairly far from the hive (von Frisch, 1967)
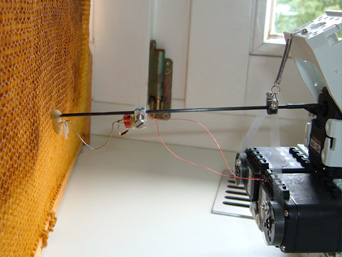
The Robot - Hardware framework
- We have developed 2 prototype designs of a robotical honeybee, based on a
parallel motion mechanism.
- Prototype 1
- Prototype 2
The parallel motion mechanism lifts the bee dummy from the comb surface at the extremal regions of the motion area - the dummy describes an arc. We have now customized a Roland plotter (i.e. a classical serial motion mechanism) to overcome this property.
Vision and hive illumination
-
Since static trajectories caused many collisions in our experiments we use cameras to detect obstacles in the projected path of the robotical bee. To simplify the recognition we illuminate the comb from behind using red light LEDs. The obstacle recognition is done using two small CMOS cameras. We had to build a new hive with one-sided combs, in which the bees are prevented to go to the rear side.
The Robot: Prototype 1
The Robot: Prototype 2
FUmanoids - The soccer playing humanoid robots of Freie Universität Berlin
- Founded in 2006 in the Artificial Intelligence group
at Freie Universität Berlin, the FUmanoids have participated in the RoboCup
competitions starting with RoboCup 2007 (Atlanta, USA) where they won third
price. In 2008 the 2nd place of RoboCup German Open was reached and in 2009
a new set of robots helped win the 2nd place of RoboCup 2009 in Graz,
Austria.
The FUmanoids team is a student project supervised by Prof. Raúl Rojas, open for bachelor, master, diploma and PhD students to work on topics of artificial intelligence and robotics, electronics and mechanics.
Robots
Humanoid robots have many potential applications, which make this area very attractive for researchers. However many of the yet developed humanoids suffer from over-designed and too complicated hardware and software which is still far from the human model.
The FUmanoid team was started in 2006 in the Artificial Intelligence group at Freie Universität Berlin, which has had a successful and long history in RoboCup with the FU-Fighters team. The team has shown an excellent performance in its first year of activity by winning the 3rd place of the world RoboCup humanoid league in kid-size class, presenting the lightest and the least expensive football playing robots in their class. This is achieved by advancing several solutions in the areas of hardware and software.
The FUmanoid project is a step towards research and development of robots which offer more real human-interaction, can perform tasks in our environment and will be able to play important roles in our daily life.
Hardware Design
While our first robots’ mechanical structure was an improved Bioloid construction kit, which is available for research and competition, in 2009 we chose a self-made mechanical construction of our robots. [...]
The actuator family used in every FUmanoid robot is the Dynamixel servo produced by Robotis Inc, Korea. “Dynamixel AX-12” and “Dynamixel RX-28” were used in 2008, in our current model “Dynamixel RX-64″ were placed into the legs for more stability and faster walking speed. The motion mechanism was increased by one and consists of 21 degrees of freedom distributed in 7 per leg, 3 per arm and one degree of freedom as a pan system holding the camera, there is no servo for tilt movement. 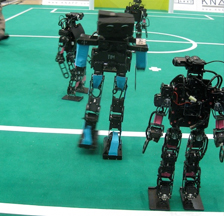
RoboCup Graz 2009
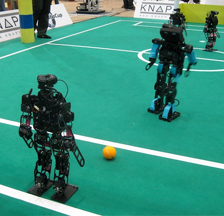
Tim against Tsinghua Hephaestus

Scoring against WF Wolves
Robocup China 2008

Lange Nacht der Wissenschaften 2008
German Open 2008

Iran Open 2008

Robocup Atlanta 2007
First Picture