
- Offer Profile
- SAUVIM (Semi-Autonomous Underwater Vehicle for Intervention Missions) began in 1997 at the University of Hawaii at Manoa. In 2001, the project, became divided among three entities to promote collaboration via technology transfer between academia (the Autonomous Systems Laboratory, University of Hawaii at Manoa), local industry (Marine Autonomous Systems Engineering - MASE, a Hawaii small business), and a government research entity (Naval Undersea Warfare Center in Newport - NUWC)
OVERVIEW
- Many underwater intervention tasks are today performed
using manned submersibles or Remotely Operated Vehicles in tele-operation
mode. Autonomous Underwater Vehicles are mostly employed in survey
applications. In fact, the low bandwidth and significant time delay inherent
in acoustic subsea communications represent a considerable obstacle to
remotely operate a manipulation system, making it impossible for remote
controllers to react to problems in a timely manner. As a result, only few
AUVs are equipped with manipulators for underwater intervention.
SAUVIM (Semi Autonomous Underwater Vehicle for Intervention Mission) has been developed in order to address this challenging task. Today, it is one of the first underwater vehicles (if not the only one) capable of autonomous manipulation.
With no physical link and with no human occupants, SAUVIM will permit intervention in dangerous areas, such as deep ocean, in missions to retrieve hazardous objects, or in classified areas.
The key element in underwater intervention performed with SAUVIM is autonomous manipulation. This is a challenging technology milestone, which refers to the capability of a robot system that performs intervention tasks requiring physical contacts with unstructured environments without continuous human supervision.
TECHNOLGY: The vehicle
- SAUVIM is built around an open-framed structure
enclosed by a flooded composite fairing. With six aluminium pressure vessels
for housing the electronics, it has been studied in order to facilitate
high-depth upgrades.
Its movement is controlled by eight thrusters located around the center of mass. The four vertical move the vehicle in the Z-axis (heave); the two, internally mounted, horizontal thrusters move the vehicle in the Y-axis (sway); and the two, externally-mounted, horizontal thrusters move the vehicle in the X-axis (surge).
The lower frame houses only the NI-MH battery pack, while the upper frame hosts all the essential electronics, visual hardware, navigation and mission sensors in six cylindrical pressure vessels. 
The vehicle

The vehicle
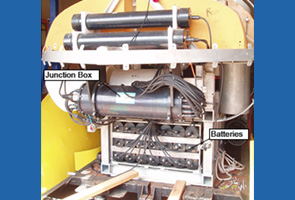
The Power Source
- SAUVIM runs on battery power, using several NI-MH banks.
TECHNOLGY: Control Architecture
-
The
architecture plan for the SAUVIM platform has been developed with a heavy
emphasis to autonomy and global information sharing.
SAUVIM uses a precise role separation between high-level (or mission control) and low-level (or vehicle control). This separation has been implemented with a dedicated software environment for autonomous systems. The mission control system is a software-emulated CPU that runs a custom programming language (SPL, Sauvim Programming Language) specially created in order to simplify high-level operation and algebraic manipulations at the same time.Since it is a software-emulated CPU, it can be compiled within the main vehicle computer while still maintaining the virtual separation between the mission control and the vehicle control [front-seat]. The hardware resides within an abstraction layer, and the entire language can be easily re-adapted to a different hardware layer, given a precise and standard specification for the interface procedures.
The computing architecture for the navigation controller is hosted on a VME-based system, with VxWorks operating system. Other distributed modules (such as the sensor server) run on PC104 systems.
-
The
architecture plan for the SAUVIM platform has been developed with a heavy
emphasis to autonomy and global information sharing.
xBus: Underwater Data Network
-
SAUVIM
uses a client-server approach for delivering information from and to each
distributed module.
Each subsystem embeds a custom TCP-IP client-server communication system (xBus). Within this architecture, every server can deliver the requested information on-demand to any number of clients, and this configuration allows a different utilization of the bandwidth, since every data is broadcasted only on demand.
Other then allowing data echang betweent different modules (navigation server, DIDSON, Manipulator, etc.), xBus could be employed in multi-AUV systems.
-
SAUVIM
uses a client-server approach for delivering information from and to each
distributed module.
Sensing the underwater world
- Autonomous manipulation systems, unlike teleoperated
manipulation robots must be capable of acting and reacting to the
environment with the extensive use of sensor data processing. Therefore, the
sensory system is one of the most critical part of an intervention AUV.
To achieve these intervention capabilities, SAUVIM is equipped with a state of the art set of underwater sensors, finalized to sense different categories of important information (position, orientation, speed, depth, bottom profile, acoustic images, target identification and position with optical cameras, acoustic trackers and more).
This equipment considerably enhances the potential value of the operation that SAUVIM may perform, from the revolutionary underwater acoustic image-mapping (a Google Earth for underwater) to the most challenging intervention tasks. 
Position Sensors
- SAUVIM collects navigation data from different sensors
source:
- DGPS data. The position from the DGPS sensor is absolute, with an accuracy of about a meter.
- DVL data. The DVL provides accurate velocity with respect to the bottom. However, these velocities must be integrated using mainly the heading information.
- Depth Sensor. The Depth Sensor measures the water pressure information at the given depth, with an accuracy depending by its range (~1 cm in the actual implementation).
- PHINS. PHINS is an Inertial Navigation System which provides true-heading, attitude, speed and position. PHINS includes a high-level inertial heart based on Fiber-Optic Gyroscopes coupled to an embedded digital signal processor that runs a Kalman filter specially developed for marine applications. PHINS’ Kalman filter holds GPS hybridation for surface alignment purpose.
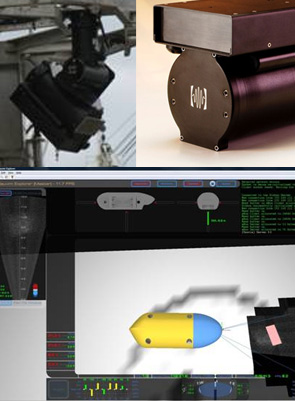
DIDSON Acoustic imagery
- One of the most important objectives in the SAUVIM
missions is the capability of identifying the environment and the target in
many different settings.
We are addressing this issue with the use of the DIDSON sonar (from Soundmetrics), mostly employed for medium range exploration and target identification and localization.Target Identification
Another important feature of SAUVIM is the capability of performing identification and localization of known submerged objects for guiding the vehicle to approach such target. It consists in recognizing known submerged objects, in computing their absolute position and in using this information in the SAUVIM navigation control loop so the vehicle can autonomously moves to the detected target

IMAGENEX Sonar
- SAUVIM uses the IMAGENEX 881 high-performance sector
scanner for underwater remote sensing.
The sonar is also used in conjunction with the DIDSON, for preparing the height field background where to map the imagery of the DIDSON
Target Localization
- One of the most difficult aspects of an intervention
mission is the identification and localization of the target.
The localization subsystem, that is the main support for the capabilities of the autonomous manipulation of SAUVIM, is performed by using and fusing different technologies (acoustical and optical) in order to guarantee a suitable, range dependent, level of reliability, precision and accuracy. The SAUVIM AUV switches through three main sensing methods in order to acquire reliable data:
In long range (over 25m), 375KHz image sonars are used for initial object searching. The accuracy in this range is necessary only to direct the vehicle toward the target zone.
In mid-range (2-25m), DIDSON sonar is used for object recognition and the vehicle positioning. This is the phase where the vehicle has to position itself in order to have the target confined within the manipulation workspace.
Finally, when the target is within the manipulator workspace, short range and high accuracy sensor are used in order to perform the actual intervention task. This goal is achieved with the combined use of underwater video cameras and an ultrasonic motion tracker, used to retrieve the real-time 6 DOF position of the target during the manipulation tasks.
The device utilizes high frequency sound waves to track a target array of ultrasonic receivers. The use of 4 transmitters at the stationary positions with 4 receivers on the target can be used to determine the 6 DOF generalized position (rotation and translation) of the object.

Target Detection using Video Processing
- Another feature available in SAUVIM is target
localization using video processing.
This goal is achieved using a video camera located on the wrist of the manipulator and a dedicated video processing system.
In our actual implementation, the system is capable of processing about 10 frames per second, which is sufficiently high in order to lock and follow the target, in case of a relative movement of the target with respect to the vehicle
xSense: Ultrasonic Motion Tracker
- SAUVIM uses a new sensor device for target localization:
an ultrasonic motion tracker used to retrieve the real-time 6 DOF position
of the target during a generic manipulation tasks.
The realized device utilizes high frequency sound waves to track a probe containing an array of ultrasonic receivers. The use of 4 transmitters at the stationary positions with 4 receivers on the probe can be used to determine the 6 DOF generalized position (rotation and translation) of the object.
Hydroacoustic Position Reference systems (HPRs) are set to provide positioning information mostly for navigation purpose, with an accuracy targeted to the requirements of the navigation task. HPR systems include Ultra- or Super- Short Base Line (USBL or SSBL), Long Base Line (LBL) and Short Base Line (SBL). While the information provided by the above system is generally excellent for navigation purpose, it is usually insufficient to measure the position of a target for a robotic intervention task. In fact, the most distinguishing features required in an underwater robotic intervention are:- Accuracy. Generally a robotic task may require a high degree of conformity of a measured quantity to its actual value, often in the order of millimeter.
- Information. A robotic task requires the knowledge of the full 6 DOF generalized position (rotation and translation) of the target with respect to the main frame (HPR systems often provide only Cartesian position).
- Size. The measuring probe must have small size in order to avoid
interaction issues with the target.
This underwater tracking technology can be also used in different situation as for example in precision vehicle docking/undocking procedures. The xSense device for SAUVIM, designed by Giacomo Marani, may achieve an accuracy that exceed most underwater tasks specifification, as shown in the following distribution of 1000 measurements around their mean values.