Navigation : EXPO21XX > AUTOMATION 21XX >
H05: Universities and Research in Robotics
> University of Cassino
University of Cassino

Videos
Loading the player ...
- Offer Profile
- Mobile Multirobot Systems
Mobile Robots
Underwater Robotics
Inverse Kinematics and Redundant Manipulators
Identification and Control of Industrial Robots
Cooperative Manipulators
Interaction Control
Product Portfolio
Mobile Multi-robot Systems
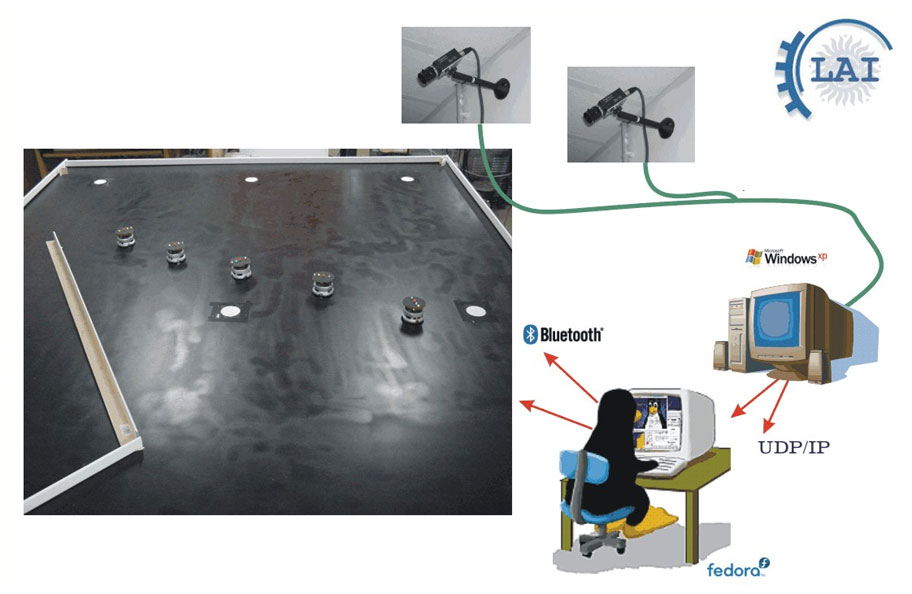
- The field of cooperation and coordination of multi-robot systems has been object of considerable research efforts in the last years. The basic idea is that multi-robot systems can perform tasks more efficiently than a single robot or can accomplish tasks not executable by a single one. Moreover, multi-robot systems have advantages like increasing tolerance to possible vehicle fault, providing flexibility to the task execution or taking advantage of distributed sensing and actuation. The use of a platoon of vehicles is of interest in many applications, such as exploration of an unknown environment, navigation and formation control, demining, object transportation, up to playing team games (e.g., soccer); these may involve grounded, aerial, underwater or surface vehicles. A behavior-based, namely the Null-Space-based Behavioral approach (NSB), aimed at guiding a mobile robots platoon has been developed. The approach, using a hierarchy based logic to combine multiple conflicting tasks, is able to fulfill or partially fulfill each task according to their position in the hierarchy. The NSB has been extensively studied and simulated for different kind of vehicles (i.e. mobile robots, underwater robots and surface vessels) while achieving several formation control missions. Moreoveo, it has been implemented to control a platoon of autonomous grounded vehicles made up of 7 Khepera II mobile robots (manufactured by K-Team).
Mobile Robots
- Experiments concerning the application of a real-time trajectory planning
algorithm to an unicycle-like mobile robot Magellan-pro (manufactured by
I-Robot) have been conducted. In the respect of the kinematic constraints
(limited velocity and acceleration), the desired path has to be kept as long
as possible. A fuzzy inference system handles path information in order to
give to the vehicle safe behaviors such as slowing down when approaching a
narrow band. Experiments concernig
odometry calibration based on the least-squares technique have been conduced both with a mobile robot Magellan-pro and a mobile robot Khepera II (manufactured by K-team).
Underwater Robotics
- Underwater robotics is a challenging task since it implies control of a non-linear system in an unstructured environment. In case of the presence of a manipulator, the system redundancy has to be taken into account. Kinematic control, dynamic control and interaction control of underwater robotic systems have been object of our research. A software package for simulation of Autonomous Underwater Vehicles (AUV) systems have been developed. Several experiments (in the ASL Lab) of AUV dynamic control and fault tolerance control have been carried out. Moreover, a navigation system for real-time path planning and obstacle avoidance of a real AUV has been devised.
Inverse Kinematics and Redundant Manipulators
- Robot control actions are naturally executed in the joint space while robot motions are specified in the task space. It is then necessary to solve an inverse kinematics problem; namely, given the end-effector trajectory, find the corresponding joint trajectories. A number of Inverse Kinematics algorithm have been studied and experimentally validated (in the PRISMA Lab) coping with redundant and non-redundant applications, kinematic joint limits, singularities, underwater applications, different orientation representations, a singularity-robust task-priority redundancy resolution for real-time kinematic control of robot manipulators has been proposed.
Identification and Control of Industrial Robots
- To improve the efficieny of the conventional controllers of industrial robots, i.e., the decentralized PD joint controllers, a number of theoretical and experimental studies (in COMAU Robotica Lab, in the PRISMA Lab and in the Katholieke Universiteit Leuven, Division PMA) have been realized in order to test advanced control schemes. Identification techniques for the estimation of the robot's dynamic and the payload parameters have been implemented for industrial robots.
Cooperative Manipulators
- Coordination of multiple manipulators' systems can provide enhanced capabilities over single arm designs. Theoretical investigations and experimental tests (in the PRISMA Lab) of kinematic control and operational space control have been conducted.
Interaction Control
- Interaction of the robot end-effector with the environment is of interest in real manipulation tasks. Theoretical and experimental work (in the PRISMA Lab) has been conducted leading to the formulation of the parallel control approach.
Mobile Ad-hoc NETworks (MANET)
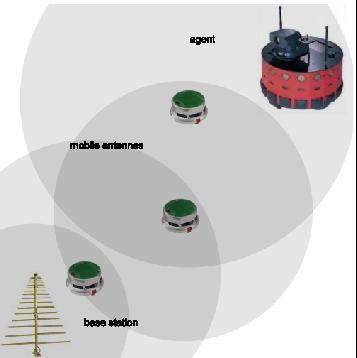
- The NSB has been recently extended to the control of a Mobile Ad-hoc NETwork (MANET), that is, the using of a platoon of mobile robots to carry a number of repeater antennas in order to guarantee a constant communication between a rescue operator (human or robot) and a fixed base station. These mobile antennas suitably moves to dynamically ensure a multihop communication link and this in spite of the presence of obstacles, signal fading area and managing failure situations (e.g., the fault of one or more mobile antennas).
Other Activities
- To solve the problem of voltage waveform regulation in power system, it is necessary to take into account that power system operating conditions continuously and unpredictably change, due to variations of generations and loads, and of the network topology. An efficient solution to this problem consists in designing the voltage regulator by adopting an adaptive control-based approach in which Kalman filtering techniques, different identification procedures and pole assignment control are studied and implemented for different power systems operating conditions.