Navigation : EXPO21XX > AUTOMATION 21XX >
H05: Universities and Research in Robotics
> University of Tennessee
University of Tennessee

Videos
Loading the player ...
- Offer Profile
- Our work is computational, in that we develop new algorithms and software architectures that have provable properties. We focus on basic research that leads to fundamental new concepts that can be demonstrated on real robot or sensor network hardware.
Product Portfolio
Research Projects
- Our work is computational, in that we develop new
algorithms and software architectures that have provable properties. We
focus on basic research that leads to fundamental new concepts that can be
demonstrated on real robot or sensor network hardware.
Particular questions that we study include:- How can globally coherent solutions be generated through the dynamic interaction of distributed intelligent entities that have only local information?
- How can heterogeneous entities share capabilities to accomplish collaborative tasks?
- How can distributed intelligent systems learn, and thus improve their performance over time, or recognize and manage faults or anomalous situations?
Distributed Modeling and Anomaly Detection in Mobile and Sensor Networks
- In this project, we are developing algorithms for distributed sensor data modeling and anomaly detection in systems of sensor networks and autonomous mobile robots using machine learning techniques. Data modeling in distributed systems is critically important for determining the "normal" operation mode of the system. Being able to model the expected sensor signatures for typical operations greatly simplifies the human designer's job in the practical application of new sensor and mobile robot systems; by enabling the system to autonomously characterize the expected sensor data streams, the system can learn the important features of its environment to monitor. This, in turn, allows the system to perform autonomous anomaly detection to recognize when unexpected sensor signals are detected. This type of distributed sensor modeling and anomaly detection can be used in a wide variety of sensor network and mobile robot applications, such as detecting the presence of intruders, detecting sensor failures, detecting anomalous human motion patterns, detecting unexpected chemical signatures, and so forth. The advantage of this approach is that the human designer does not have to characterize the anomalous signatures in advance. Instead, the system of sensor nodes and mobile robots can learn this characterization autonomously, for quick application to new domains. Our work focuses on the research aspect of these issues. The techniques being developed employ distributed statistical machine learning approaches for sensor data modeling and anomaly detection. The algorithms are being designed, developed, evaluated, and validated experimentally in laboratory application scenarios, such as intruder detection, or environmental coverage and exploration.
Adaptive Causal Models for Fault Diagnosis and Recovery in Multi-Robot Teams (LeaF)
- We developing learning techniques for automatically
adapting causal models for fault diagnosis and recovery in complex
multi-robot teams. We believe that a causal model approach is effective for
anticipating and recovering from many types of robot team errors. We have
implemented one of the first full applications of causal models to a complex
multi-robot team. However, because of the significant number of possible
failure modes in a complex multi-robot application, and the difficulty in
anticipating all possible failures in advance, our empirical results show
that one cannot guarantee the generation of a complete a priori causal model
that identifies and specifies all faults that may occur in the system.
Instead, an adaptive method is needed to enable the robot team to use its experience to update and extend its causal model to enable the team, over time, to better recover from faults when they occur. We are developing a case-based learning approach, called LeaF (for Learning-based Fault diagnosis), that enables robot team members to adapt their causal models, enabling them to learn from faults encountered during their mission, and to improve their ability to diagnose and recover from these faults over time. As part of this project, we are also developing metrics for measuring fault tolerance in multi-robot teams.
Constructivist Learning using ASyMTRe in Multi-Robot Teams
- Constructivist learning is the process of actively learning new skills based on previous experience. This research project extends the state of the art for constructivist learning in multi-robot teams by developing new, computationally efficient techniques that allow robot team members to continually improve their skills over time. Current approaches to constructivist learning in robotics find correlations between existing low-level robot actions and a desired behavior. However, because these existing approaches begin with such a low level of action abstraction, they are extremely computationally intensive. Our new constructivist learning approach begins at a higher level of abstraction -- the sensori-motor schema -- which should enable much more computationally efficient learning. Our approach builds upon our prior work, called ASyMTRe, that forms multi-robot coalitions by automatically combining sensori-motor schema building blocks to solve the task at hand. This work adds an important learning component allowing robot team members to continually improve their skills by "chunking" existing low-level schema building blocks into efficient higher-level task solutions. This new approach will provide important new lifelong learning capabilities to multi-robot teams, thus significantly facilitating their use in real-world applications, such as search and rescue, security, mining, hazardous waste cleanup, industrial and household maintenance, automated manufacturing, and construction. We also intend to show that the proposed techniques are applicable to other types of robotic systems, including humanoid and service robots, and thus have a broader impact on the robotics field as a whole.
Coalescent Multi-Robot Teaming through Automated Task Solution Synthesis (ASyMTRe)
- This project deals with the development of a
methodology for automatically synthesizing task solutions for heterogeneous
multi-robot teams. In contrast to prior approaches that require a manual
pre-definition of how the robot team will accomplish its task (while perhaps
automating who performs which task), our approach automates both the how and
the who to generate task solution approaches that were not explicitly
defined by the designer a priori. Our approach, which we call ASyMTRe, is
inspired by the theory of information invariants. ASyMTRe is based on
mapping environmental, perceptual, and motor control schemas to the required
flow of information through the multi-robot system, automatically
reconfiguring the connections of schemas within and across robots to
synthesize valid and efficient multi-robot behaviors for accomplishing the
team objectives.
We have developed a centralized anytime ASyMTRe configuration algorithm, proving that the configuration algorithm is correct, and formally addressing issues of completeness and optimality. Additionally, we have developed a distributed version of ASyMTRe, called ASyMTRe-D, which uses multi-robot communication to enable distributed teaming. We have validated the centralized approach by applying the ASyMTRe methodology to two different teaming scenarios: multi-robot transportation, and multi-robot box pushing. We are validating the distributed ASyMTRe-D implementation in the multi-robot transportation task, and are showing how this version is a tradeoff between solution quality and robustness compared to the centralized approach. The advantages of this new approach to coalescent teaming are that it: (1) enables the robot team to synthesize new task solutions that use fundamentally different combinations of robot behaviors for different team compositions, and (2) provides a general mechanism for sharing sensory information across networked robots, so that more capable robots can assist less capable robots in accomplishing their objectives. Autonomous Assistive Navigation in Heterogeneous Robot Teams
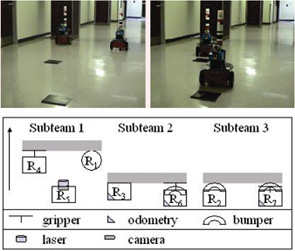
- This research is aimed at the development of autonomous behaviors for tightly-coupled cooperation in heterogeneous robot teams, specifically for the task of navigation assistance. These cooperative behaviors enable capable, sensor-rich "leader" robots to assist in the navigation of sensor-limited (``simple'') robots that have no onboard capabilities for obstacle avoidance or localization, and only minimal capabilities for kin recognition. Because of the navigation limitations of the resource-bounded robots, they are unable to autonomously disperse themselves or move to planned sensor deployment positions independently. To address this challenge, we have developed cooperative behaviors for heterogeneous robots that enable the successful deployment of sensor-limited robots by assistance from more capable leader robots. These heterogeneous cooperative behaviors are quite complex, and involve the combination of several behavior components, including vision-based marker detection, autonomous teleoperation, color marker following in robot chains, laser-based localization, map-based path planning, and ad hoc mobile networking. We have validated our approach in extensive testing on the physical robots. To our knowledge, this is the most complex heterogeneous robot team cooperative task ever attempted on physical robots. We consider it a significant success to have achieved such a high degree of system effectiveness, given the complexity of the overall heterogeneous system.
Distributed Mobile Acoustic Sensor Networks
- This research is focused on the development and deployment of distributed mobile acoustic sensor networks. The approach assumes the indoor environment has been previously mapped and that the sensor nodes know their position in the map. The targets are localized in the sensor network based upon local maxima of the acoustic volume. The current target localization information is reported to an Interceptor robot, which utilizes a dual wavefront path planner to move from its current location to a location that is within visibility range of a target. This approach has been rigorously tested on physical robots. To our knowledge, this is the first implementation of a multi-robot system that combines the use of an acoustic sensor net for target detection with an Interceptor robot that can efficiently reach the moving position of the detected target in indoor environments.
Heterogeneous Swarm Robotics for Search Applications
- The goal of this DARPA project was to demonstrate large numbers (100+) of physical heterogeneous robots cooperating to solve indoor search applications. This project was a joint effort between Science Applications International Corporation (SAIC), The University of Tennessee, Telcordia Technologies, and the University of Southern California. This project has developed and utilized a number of novel collaborative control algorithms to enable this robot team to explore an unknown building (one floor), find objects of interest, and "protect" the objects of interest over a 24-hour period, autonomously returning for battery recharging when necessary. All robot actions are highly autonomous and are monitored by a human operator using a sophisticated user interface at the building entrance.
Distributed Behavior Catalog and Assessment
- The goal of this DARPA project is to analyze the
theoretical and practical capabilities and limitations of existing
swarm-based approaches for robotic search applications. In this context,
search applications include the widest variety of approaches for both indoor
and outdoor search, as well as practical and idealized search environments.
Searches can involve exploring for many objects or for one object,
determining where objects are located or where they are not located,
determining the probabilities of accuracy in search, and so forth. The aim
is to develop an extensive understanding of the algorithms and techniques
that have been developed, and to document and catalog the approaches,
resources required, assumptions, and techniques for evaluation that are
pertinent to each approach. The focus is on the specific details of the
various approaches that make them useful (or perhaps impractical) for
robotic application in military domains. Issues such as the assumptions of
sensor capabilities and their impact on the behaviors will be analyzed.
Communications requirements will be determined, along with algorithm
sensitivity to the degradation of communications availability. An
understanding of the practical tradeoff space will be developed, including
the impacts of various points of failure.
This project began with an exhaustive literature search of existing techniques for swarm approaches to search applications. The key issues defining the tradeoff space of these algorithms and their applicability to practical military applications have been defined. This tradeoff space was initially be defined based upon a coarse analysis of the existing swarm techniques. Then, a detailed analysis of the approaches was developed, resulting in an extensive catalog of swarm technologies and their capabilities, assumptions, requirements, and limitations. The theoretical analysis and cataloging of techniques from this project will be used to determine which practical military applications for search (such as plume tracking or demining) can be solved with existing technology, and which applications require further research and development in swarm robotics.