IDSIA

Videos
Loading the player ...
- Offer Profile
- The award-winning Robotics Lab of the Swiss AI Lab IDSIA was founded in 2007. It is a laboratory to apply artificial intelligence methods to various types of real robots: mobile robots, manipulating robots, and humanoid robots. The lab is located at the SUPSI site in Manno-Lugano, Switzerland.
Product Portfolio
LEARNING ROBOTS
- Learning Robots in partially observable environments
Some hardwired, pre-programmed robots such as TU Munich's humanoid walking biped and BU Munich's fast robot car perform impressive tasks. But they do not learn like humans do.
So how can we make them learn from experience? Unfortunately, traditional reinforcement learning algorithms are limited to simple reactive behavior and do not work well for realistic robots.
Robot learning in realistic environments requires novel algorithms for learning to identify important events in the stream of sensory inputs, and to temporarily memorize them in adaptive, dynamic, internal states until the memories can help to compute proper control actions.
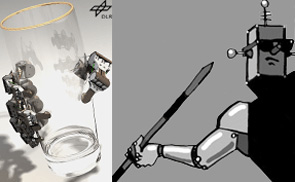
We believe that among the most promising approaches for learning to memorize are our recurrent neural networks , policy gradients, and the Optimal Ordered Problem Solver. An ambitious long-term goal is to implement a full-fledged Gödel machine for a real learning robot. Research topics of our CoTeSys group included: Artificial curiosity and creativity for the DLR artificial hands and the iCub baby robot, behavior evolution for AM's 180cm walking biped, visual attention & unsupervised learning & sequence learning for adaptive mobile robots and robot cars, safety for humans interacting with learning robots.
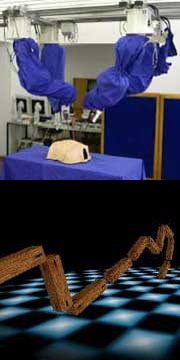
We are studying not only real robots but also virtual ones, living in 3- dimensional video game-like worlds with rather realistic simulated physics. We are also interested in non-wheeled learning robots, such as artificial snakes. Their navigation problems are harder than those of wheeled ones. On the other hand, they can deal with rough terrain.
- Learning Robots in partially observable environments
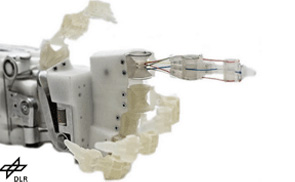
BIOMORPHIC VARIABLE STIFFNESS
- How can stiffness & elasticity enhance performance of
human and robotic arms? Our targeted modelling studies will combine detailed
biophysical models and machine learning to achieve optimal control of an
embodied, highdimensional, variable- impedance robotic system.
Many industrial robots are much stronger than humans, but also very inflexible. For example, humans can throw objects much further and catch them much more gracefully, temporarily storing energy in elastic tendons and muscles. Such flexible actuators, however, require more sophisticated control algorithms than those used by traditional robots. The goal of the STIFF consortium is to equip a highly biomimetic robot hand-arm system with the agility, robustness and versatility that are the hallmarks of the human motor system, by understanding and mimicking the variable stiffness paradigms that are so effectively employed by the human central nervous system. A key component of our study will be the anatomically accurate musculoskeletal modelling of the human arm and hand. The project will develop novel methodologies to comprehend how the human arm can adapt its impedance, e.g., by changing the co-contraction level or by adapting reflex gains. The impedances of arm and hand will be investigated using powerful robot manipulators capable of imposing force perturbations. While stiffness & elasticity are currently exploited in the context of artificial laboratory tasks, we will investigate stiffness-dependent behaviour in natural tasks such as throwing a ball or inserting a peg in a hole. Existing closed-loop system identification techniques will be extended by non-linear time-variant techniques to identify the behaviour during reaching and grasping tasks. Grasp force modulation and hand muscle activity correlations will be acquired through machine learning techniques and then transferred to the robotic system. Finally, optimization techniques gleaned and validated on the detailed biophysical model will be transferred to the variable impedance actuation of the novel biomorphic robot.

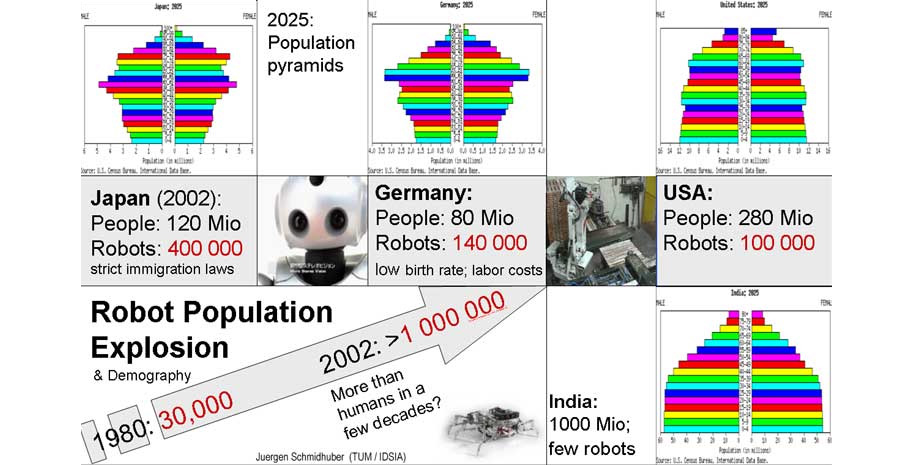
Robot population explosion
- For decades Prof. Schmidhuber's talks have featured
slides such as the one above.
According to Nature's millennium issue, the most influential invention of the 20th century was the one that triggered and sustained the human population explosion: the Haber-Bosch process. Billions of people would not even exist without it.
Currently we are living through a robot population explosion. It is most visible in a few countries where the human one has stopped. See Japan's and Germany's weird population pyramids above (projections for 2025): few young people; many old people. Eventually all nations will feature similar demographic statistics.
Then who is going to do all the work? Robots, of course. In 1980 there were just 30,000 robots; in 2002, already 1,000,000, almost half in Japan, one third in Europe, especially in Germany, the world's 2nd-largest market.
The robot population explosion might eventually overtake the human one, once cognitive robots no longer have to be hardwired but learn by themselves. That's what they are working on at TU Munich's lab for cognitive robotics. RESILIENT, SELF-MODELING ROBOTS
- In 2004, RoboCup world champion Alexander
Gloye-Förster (presently at IDSIA) and his team built the first resilient
machines using continuous self-modeling. Their robots can autonomously
recover from certain types of unexpected damage, through adaptive
self-models derived from actuation-sensation relationships, used to generate
forward locomotion. References are Gloye's PhD
Here are some relevant excerpts from the 2005 article by Gloye et al.: "The same techniques applied in the previous section to robots which are not accurate enough can now be applied to solve the problem of a damaged motor. [...] Our robots have four omnidirectional wheels, when one motor is damaged, the robot has enough redundancy to still drive omnidirectionally but the PID controller on the robot tries to control four motors. We could of course have different PID controllers in the robot, and when a motor fails, we could switch from a four wheel to a three wheel controller. However, if the motor just partially fails (it starts to deliver less power, if for example the motor has become very hot) it would be desirable to have a way of adapting the commands sent by the high-level control. Also, the robot electronics could be a black-box which we do not want or cannot modify. In our experiments, we took a robot with four motors and disconnected one of them. The vision system tracks the robot for some time and learns to predict its response function to commands, as discussed above. We then apply the on-line correction to the damaged robot with great success. As can be seen [...] the driving behavior of the damaged robot is similar to that of a fault-free robot. The robot is somewhat slower, but it can drive accurately again. As this simple experiment shows, it is then feasible to make these types of corrections during RoboCup games. If a motor completely fails, or loses power, the high-level control can let the robot drive for some time, relearn its driving behavior, and apply the online correction. The result is a robot that heals after a few seconds because the coach (the central computer) knows which commands to send ..." 
- scene from the 2004 final.

- One of Gloye-Förster's FU-Fighters that won the 2004 RoboCup in the fast league (where human adversaries with a joystick have no chance). The machine continually uses an artificial neural net to model current properties of its 4 wheel omnidirectional drive.
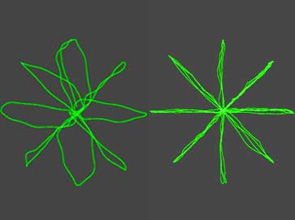
- left: a damaged RoboCup robot is no longer able to
execute a precise star-shaped driving pattern.
right:The same robot quickly adapts its neural model of the relation between motor commands and sensory inputs, and uses it successfully to plan and optimize its driving trajectories, in the spirit of a paper by J. Schmidhuber
TU Munich Cogbotlab
- Mission: to build robots that learn.
Tools: recurrent networks, Bayesian methods, reinforcement learning, evolution, optimal search, others.
Theory: optimal universal learners, universal Bayesian induction, Kolmogorov complexity, Gödel machines.
We are living through a robot population explosion. In 1980 there were just 30,000 robots; in 2002, already 1,000,000, almost half in Japan, one third in Europe, especially in Germany, the world's 2nd-largest market for robots.
But nearly all robots are prewired; they cannot learn from experience like humans do. And the few that adapt usually just react to their current sensory inputs without making use of relevant events further in the past. Is there an optimal way of learning non-reactive behaviors in general, unknown environments? Our recent theoretical insights affirm that the answer is yes. And our biologically plausible approaches use adaptive recurrent neural networks with internal states to control autonomous robots in realistic, partially observable environments.
According to Nature's millennium issue, the most influential invention of the 20th century was the one that triggered and sustained the human population explosion: the Haber- Bosch process. Billions of people would not even exist without it.
The robot population explosion is most visible in a few countries where the human one has stopped, and might eventually overtake it, once cognitive robots no longer have to be hardwired but learn by themselves. Why come to TUM?
- It is a leader in the fields of automation and robotics, with many unique and expensive robots, and strong connections to industry leaders such as Munich's BMW and Siemens. 14 Nobel laureates (the most recent one of 2005) are associated with Munich, 4 of them with TUM. The FOCUS survey (20 Sept 2004) ranked TUM first among Germany's universities, right ahead of Munich's LMU. On 10/13/2006 both TUM and LMU were selected as two of the three German "Elite Universities" by the "Excellence Initiative" funded by 1.9 billion Euros for the next 5 years. This was prime time news on all German channels.
Why come to Munich?
- It is one of the world's most livable places (ranked 2nd among the world's cities with over a million inhabitants, after Vienna, according to this survey), and gets consistently voted as Germany's most attractive city. Lots of culture & fun, 100,000 students, the world's largest festival (Oktoberfest), the world's oldest & largest technical museum, scenic Bavarian surroundings with lakes, rivers, hills, meadows, bikepaths, castles, and beer gardens, close to major ski areas etc. Schmidhuber has seen the world, and claims there is no more beautiful region than the pre-alpine land between Munich and the Alps. (He is biased though - he was born in Munich.)
Why come to Germany?
- Why come to Germany? It is a fine place for scientists and inventors, with a long tradition of fundamental breakthroughs that define today's world, including Western bookprint, the calculator, binary arithmetics & calculus,, watches & other small machines, math a la Gauss, the second industrial revolution based on the combustion engine & the car & the first practical dynamo & electric locomotion, the germ theory of disease, the modern research university, general relativity, quantum physics, population explosion, the transistor, the computer, controlled heavy flight, the helicopter, the jetplane, cruise missiles, uranium fission, X-rays, and innumerable others.
STATISTICAL ROBOTICS
-
Statistical robotics applies well-known techniques of statistics and probability theory (previously already widely used in computer vision) to problems of robotics. Typical methods include Kalman filters, EM, Bayesian networks, particle filters, etc. The robot's belief about its current state is a probability density function on the possible states; the belief is continually updated based on new sensory inputs and a prior probabilistic model of the effects of actions.
For example, robot car pioneer Ernst Dickmanns (1980s and 90s) used Kalman filters to deal with uncertain sensor readings of his autonomous vehicles.
Since 1990 or so, much of the work in the area of "probabilistic robotics" has focused on robot localization and map building, triggered by the pioneering work of Durrant-Whyte's group (Kalman filters / simultaneous localization and map building SLAM) as well as Smith et al.
THE ULTIMATE PROBABILISTIC APPROACH
The references are about localization (in older but very similar approaches to vision, an equivalent goal is object tracking). Our long-term goal, however, is to build robots that learn complex action sequences for solving given tasks in unknown environments (localization is but a part of this).
More and more machine learning researchers are currently becoming aware of the fact that there is a universal, Bayesian, theoretically optimal way of doing this, at least if we ignore computation time for the moment. It is based on Solomonoff's universal mixture M of computable probability distributions. If the probabilities of the world's responses to the robot's actions are indeed computable (which everyone assumes), then the robot may predict its future sensory inputs and rewards using M instead of the true but unknown distribution. And according to recent theorems of Hutter (then on Schmidhuber's SNF grant 20-61847), the robot can indeed act optimally by choosing those action sequences that maximize M-predicted reward. This may be dubbed the unbeatable, ultimate statistical approach to robotics - it demonstrates the limits of what's possible.
Cotesys
- CoTeSys stands for Cognitive Technical
Systems such as
autonomous vehicles, humanoid robots, and robot factories. Our CoTeSys
research topics include:
1. Artificial curiosity for the DLR artificial hands
2. Behavior evolution for AM's 180cm walking biped
3. Visual attention & unsupervised learning & sequence learning for adaptive mobile robots and robot cars
4. Safety for humans interacting with learning robots
CoTeSys combines the expertise of TUM, LMU, UniBW, DLR, MPI, in neuroscience, natural sciences, engineering, computer science, and the humanities. It is one of the few proposals accepted in an intense nation-wide competition in 2006.
Munich's Universities. CoTeSys partners TUM and LMU rank first among Germany's universities, according to recent surveys by FOCUS and SPIEGEL. 14 Nobel laureates (the most recent one of 2005 at MPI) are associated with Munich. On 10/13/2006 TUM and LMU were selected as two of the three German "Elite Universities" by the "Excellence Initiative" funded by 1.9 billion Euros for 5 years. This was prime time news on all German channels.
Munich (München) is one of the world's most livable places (ranked 2nd among the world's cities with over a million inhabitants, after Vienna, according to recent surveys). Lots of culture & fun, 100,000 students, the world's largest festival (Oktoberfest), the world's oldest & largest technical museum, the headquarters of BMW and Siemens, scenic Bavarian surroundings with lakes, rivers, hills, meadows, bikepaths, castles, and beer gardens, close to major ski areas etc. Many claim there is no more beautiful region than the pre-alpine land between Munich and the Alps.
Germany is a fine place for scientists and inventors, with a long tradition of fundamental breakthroughs that define today's world, including Western bookprint, the calculator, calculus & the bit, small machines such as watches, math a la Gauss, the second industrial revolution based on the combustion engine & the car & cheap electricity & modern chemistry, the germ theory of disease, the modern research university, general relativity, quantum physics, the population explosion, the transistor, the computer, controlled heavy flight, the helicopter, the jetplane, uranium fission, missiles, X-rays, and innumerable others. For most of the 20th century Germany boasted more Nobel prizes than any other nation (1901-1956; or until 1965 if we consider only the laureates' countries of birth; until 1975 if we consider only the sciences). It is still the world's largest exporter. It is also the world's second largest maker and user of robots, after Japan, and birthplace of the first robot cars. Many German teams became world champions in the RoboCup, the most visible robot competition. 
- CoTeSys combines the expertise of TUM, LMU, UniBW, DLR, MPI, in neuroscience, natural sciences, engineering, computer science, and the humanities. It is one of the few proposals accepted in an intense nation-wide competition in 2006.

- Self-aware cognitive technical system sees the ligh

- CoTeSys Autonomous Car. Back in the 1980s, UniBW built the world's first real robot cars, and in 1995 its vision-guided Mercedes robot already drove from Munich to Denmark and back, in traffic, at up to 180 km/h, automatically passing other cars

- Outline of the CoTeSys Cognitive Factory, designed to evaluate both fundamental and applied research in various CoTeSys areas.
Robot cars
- Prof. Schmidhuber's highlights of robot car history
Prehistory before 1980: simple self-driving vehicles
1977: a vehicle of Japan's Mechanical Engineering Lab follows roads for up to 50 m at up to 30 km/h
1980s: the legendary Ernst Dickmanns (right) and his group at Univ. Bundeswehr Munich (UniBW) build the world's first real robot cars, using saccadic vision, probabilistic approaches such as Kalman filters, and parallel computers
1987-1995: almost $1 billion for the pan-European Prometheus project, the largest robot car project ever (with UniBW and many others)
1990s: Kanade, Thorpe (CMU); neural nets learn to steer (Pomerleau)
1994: Autonomous vision-based VaMP robot of Dickmanns @ UniBW drives in Paris traffic, tracking up to 12 other cars simultaneously
1995: "no hands across America" (CMU). Throttle and brakes need human control though
1995: UniBW Munich's fast Mercedes robot does 1000 autonomous miles on the highway - in traffic - no GPS!
2005: DARPA "grand challenge" (limited to US teams): no traffic, dirt roads, driven by GPS: course predefined by 2935 GPS points (up to 4 GPS points per street curve). Obstacle types known in advance
2006: European Land Robot Trials (ELROB): demos of autonomous offroad vehicles
2007: New robot car demos and challenges by ELROB and DARPA
What will the future bring? In 2005 computers were roughly 1000 times faster per dollar than those of Dickmanns' era, and the next decade will bring another factor of 1000 or so. Such hardware advances are the main reason for progress in robot control - software advances seem less crucial as the basic algorithms for pattern recognition and probabilistic reasoning have not changed fundamentally in the past decade, except for epsilon improvements here and there. Somewhat surprisingly, however, many representatives of leading car companies such as BMW and DaimlerChrysler (the company with the world's largest private research budget: $6.7 billion as of 2005) are not all too enthusiastic about self-driving vehicles. Why not? Because they feel that completely autonomous cars do not necessarily fit the self-image of their customer base. Hence their present research focuses on more modest topics such as driver assistance. Even absent a large market for commercial self-driving cars, autonomous vehicles may still find significant military applications - compare the work of the US Army Research Lab (since the mid 1990s), General Dynamics Robotic Systems, and NIST (system architecture by J. Albus & team).