ROBOTNOR

Videos
Loading the player ...
- Offer Profile
- ROBOTNOR - Centre for Advanced Robotics in Trondheim, Norway, is funded by NTNU and SINTEF. We specialize in development of next generation robotics technologies and concepts, promoting education and industrial innovation.
Product Portfolio
SPACE ROBOTICS

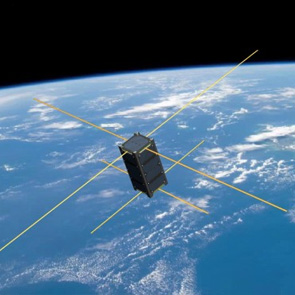
NCUBE SATELLITE
- nCube-2 was launched 27 October, 2005. It was a cubesat,
a 10 cm cube weighing less than 1kg. It contained an attitude control system
using magnetic coils as actuators and magnetometer and sun sensor as
measurements. The mission was to receive and transmit AIS signals from ships
and reindeer. The spacecraft reached orbit, but communication was not
achieved.
nCube-1 (renamed Rudolf due to the reindeer tracking task) was launched from Baikonur cosmodrome in Khasakstan on July 26th 2006, but the launch vehicle, a Dnepr crashed during launch.
NUTS - NTNU TEST SATELLITE
- The NUTS satellite is a 2 unit CubeSat designed by students at NTNU. The plan is to design, build and launch the satellite by late 2014. Students from several departments at NTNU participate in the project. The main payload is an infrared camera that will take pictures of an atmospheric phenomena called gravity waves. To achieve this, the orientation of the satellite must be controlled and the camera must be pointed towards the Earth at specified time slots. The system responsible for determining and controlling the attitude consists of a gyro, a magnetometer and sun sensors as well as coils as actuators.

SATELLITES FOR ATTITUDE CONTROL
- AUVSAT is a pair of spherical robots actuated by three orthogonal reaction wheels for performing attitude control experiments. The vehicles emulate the motion of formation flying spacecrafts, but are designed to work underwater using neutral buoyancy to emulate the conditions in orbit.
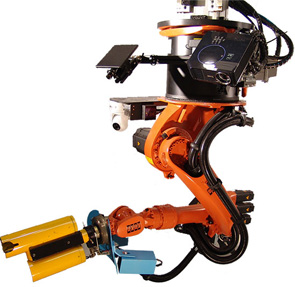
INDUSTRIAL ROBOTS
- Industrial robots are the relentless workforce of the industries. They pick, place, paint, and weld a wide variety of objects. They are automatically controlled, reprogrammable multipurpose manipulators. The backbone of their actions is the sensors and software driving them. The software represents implementation of advanced algorithms and mathematical models developed to increase accuracy, reliability and efficiency of the manipulators. Knowledge of its environment and modular tool handling gives industrial robots the capability of handling a wide variety of tasks. As the application areas of industrial robots are increasing, the human-machine interface is changing. The robots are usually manipulators with a few degrees of freedom and exchangeable tools, though a wide variety of designs exist.

NEXT GENERATION ROBOTICS
- Launched in 2009, this project aims to develop the next generation robotic technology for Norwegian industry. The project spans five years and has a budget of 36. mill NOK. The project is led by SINTEF ICT Applied Cybernetics and has 8 partners: SINTEF , NTNU, Statoil, Hydro, Tronrud Engineering, Glen Dimplex Nordic, SbSeating (HÅG) and RobotNorge. Project manager is Dr. Svein P. Berge, SINTEF ICT.

UR5 FROM UNIVERSAL ROBOTS
- The UR5 manipulator arm from Universal Robots is a safe, silent and affordable robot with an easy-to-use interface. ROBOTNOR has several UR5 robots which can perform tasks by themselves or by cooperating to solve a task together. The UR5 weighs only 18.4 kg and has a payload capacity of 5 kg. One of the main benefits of the UR5 is that it does not require safety guarding. The robotic arm is in compliance with the ISO standard for collaborative robots and it is very silent, even during operation. The robot can be controlled either with a tablet-like operating panel or from a computer over an Ethernet connection.
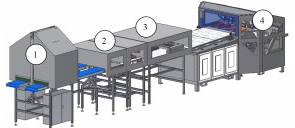
PINEBONE REMOVAL IN SALMON
- Current systems for automatic processing of salmon are not able to remove all bones from freshly slaughtered salmon. The fillet is damaged or the bones broken if the bones are pulled out without “maturing” the fish for several days. This means a reduction of both shelf life and quality of the final product.
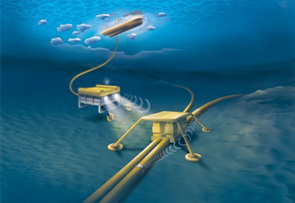
OFFSHORE ROBOTICS
- SINTEF ICT has cooperated with the Norwegian oil & gas
company Statoil since 2005 on offshore robotics for remote inspection and
maintenance of process equipment. A lab facility has been built in
Trondheim, Norway, in cooperation with NTNU in order to demonstrate concept
solutions for such operations.
We have developed solutions which can be used as a basis for fully operational offshore robotics systems. Moreover, several challenges have been identified and systemized. These need to met before a successful deployment of such systems can be made possible.
The technology developed include tooling for robot intervention, 3D model-based approaches to remote control of operations, autonomous object localization and intervention, online teleoperation, and collision control. 
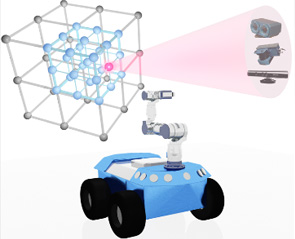
3D CAMERA TO GIVE ROBOTS BETTER VIEW
- The TACO (Three-dimensional Adaptive Camera with Object Detection and Foveation) EU project aims at enhancing the abilities of service robots by improving the sensing system with real 3D foveation properties and to increase their ability to interact with their natural environment in a more natural and human-like way.
UNDERWATER ROBOTIC MANUPULATION WITH ADAPTIVE COMMUNICATION LINKS
- PhD project start-up: August 2013
Supervisors: Kristin Y. Pettersen (ITK), Hefeng Dong (IET), Ingrid Schjølberg (AMOS)
More information about the project will be added soon.

UNDERWATER ROBOTICS LAB
- NTNU has recently established the Applied Underwater Robotics Laboratory (AUR lab). The lab is being used for applied research on subsea robotics.
SNAKE ROBOTS
- IIn a few years, snake robots will assist in search and rescue missions after earthquakes and carry out maintenance operations inside process pipes. ROBOTNOR has conducted research on snake robots for several years and is getting closer to realizing the potential of these mechanisms.

MAMBA- OUR NEW MODULAR SNAKE ROBOT
- Mamba is packed with novel functionality that will allow us to demonstrate new applications of snake robots. The robot has several types of modules that can be arranged in arbitrary configurations based on the intended application of the robot. All modules are watertight, which will allow any configuration of the robot to operate under water.

WHEEKO - A SNAKE ROBOT WITH PASSIVE WHEELS
- Wheeko is an experimental platform which we developed to study snake robot locomotion across flat surfaces. The robot consists of 10 identical joint modules, each having two motorized degrees of freedom (pitch and yaw). The modules are covered by passive wheels to give the robot anisotropic ground friction properties, which enable the robot to slither forward over flat surfaces.

ANNA KONDA - THE FIRe fighting snaKE ROBOT
- Reserach on snake robots at ROBOTNOR began with the development of Anna Konda. The robot was developed based on the vision of a self-propelled fire hose that can crawl into a burning building and extinguish a fire on its own without putting human fire fighters at risk.

KULKO - A SNAKE ROBOT WITH TACTILE SENSORS
- Kulko is an experimental platform for investigating snake robot locomotion in environments with obstacles. Locomotion in such environments requires that the snake robot can sense its environment in some way. Moreover, enabling a snake robot to glide forward in a cluttered environment requires that the body of the robot is sufficiently smooth, i.e. free of obstructive features.

AIKO - A SNAKE ROBOT WITH DC MOTORS
- Aiko is one of our first snake robots and was developed in order to produce a portable system for experimenting with snake robot locomotion. The robot consists of several identical joint modules with two motorized degrees of freedom each.
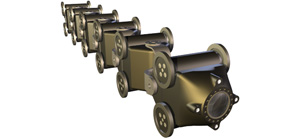
PIKO - THE PIPE INSPECTION ROBOT
- What does the inside of a pipe look like after 30 years of service? Expertise in advanced robot systems allow scientists at ROBOTNOR to construct a new type of robot for inspection of complex pipe systems.
WHEELED ROBOTS
- Wheeled robots are excellent tools for simple tasks such as moving objects from one place to another, or more difficult tasks such as increasing the range of a robotic arm. Wheeled robots are generally simple and cheap mechanisms. Furthermore, they have a high weight capacity, which can be used to bring heavy equipment or batteries that extend the operative time of the robot. Wheeled robots have numerous applications, such as providing a live video feed to an operator or measuring the noise levels of equipment in a remote location.

KUKA YOUBOT
- ROBOTNOR has acquired two KUKA youBots that are used for research and experimentation (one in our facilities in Trondheim and one in Oslo). The KUKA youBot is best described as a desktop mobile manipulator, consisting of an omnidirectional mobile base with a five degrees of freedom manipulator attached to it. The omni wheels allow the youBot base to move freely in all directions.

SEEKUR - MOBILE MANIÜULATOR
- Mobile manipulators are comprised of one or more robotic arms attached to a mobile robot base. Relevant application areas include health-care robotics, manufacturing, robotic assistants, and security. Researchers from ROBOTNOR are working with mobile manipulators within areas such as path-planning, force-control, robot vision, and localization.

TRILLE - A PIONEER ROBOT
- Trille is a modified version of a Pioneer P3-DX from Adept MobileRobots. The robot is equipped with a serving tray which can be heightened and lowered to adapt to the specific needs of a task. The robot is also equipped with ultrasonic sensors and a laser range finder that allow it to detect and avoid obstacles.

MODULAR LOCALIZATION SYSTEM FOR INDOOR IMOBILE ROBOTS
- In order for a mobile robot to move autonomously and intelligently through its environment, it is dependent on localization technologies. Localization means the process of finding out where you are in the world, for instance by looking at a map or checking your GPS (it’s not always that easy for a robot). Industrial systems of today depend on specific technologies like ultrasound, radio (Wi-Fi or GPS), or optical recognition. Each technology trades either price or complexity for accuracy.
SEAMLESS - MOBILE MANIPULATOR NAVIGATION IN COMPLEX SCENES
- Mobile robot manipulators (mobile robots with one or more attached manipulator arms) will be prevalent in addressing many future industrial and social needs such as contributing to the caring for an aging population, performing autonomous inspection, maintenance and repair operations in onshore and offshore industrial facilities, operating the factories of the future, as well as monitoring environmental pollution and removing contamination.
NANOROBOTICS
- Nanorobotics is an emerging and wide-spanning field.
It can either be defined as a system where the dimensions of the parts
approach the scale of a nanometer, or where the positional resolution
approaches the scale of a nanometer.
A typical concept of a nanorobot is a controllable device at the size of bacteria, which can be used in the human body for medical purposes. This does not exist yet, but research might eventually lead us there.
A key enabling technology for building and verifying the operation of such microscopic devices is the scanning probe microscope, as such an instrument can be used for atomic resolution imaging and manipulation. Scanning probe microscopy techniques have already been used to move single atoms and build e.g. functional transistors consisting of 7 atoms measuring 4 nm in length.
Fabrication and imaging of structures consisting of a number of atoms that can actually be counted represent research challenges that span several scientific disciplines. Control engineering contributions are driven by the high performance requirements for motion control, and also encompass the development of better instrumentation for measurement and actuation. 
THE LIGHTHOUSE ROBOTICS PROJECT
- The lighthouse project was initiated by the IME faculty at NTNU in 2013. The purpose of the project is to strengthen and further develop cutting edge research in robotics carried out by departments at the faculty.
PROSTHETIC SYSTEMS
- The loss of a limb is a great limitation on the freedom of a person. Prosthetic systems attempt to return some of the functionality that was lost by mimicking natural human movement in a robotic system. The challenge lies in controlling the many degrees of freedom of the human limb. With advanced software and sensor technology, a prosthetic limb can switch between a variety of modes and eventually control multiple degrees of freedom at the same time. Fine motor control is necessary to be able to hold a glass without destroying it. Most prosthetic systems are controlled by EMG, measuring the electrical muscle signals. As the human body is a complex system, the interaction and response from sensors will be different when the limb is in different positions. To counteract this issue, advanced prosthetic systems can measure the configuration of the system and react accordingly. With the aid of prosthetic systems, life can be resumed when limbs are lost.

UPPER LIMB PROSTHETIC SYSTEMS
- During the last decade, several multi-articulating hands have become available to prosthesis users. Even though these modern hands have an impressive design and a long list of grip patterns to select from, the control methods are not yet able to offer an intuitive interface to the user.
OTHER RESEARCH PROJECTS
VISION SYSTEMS
- Vision sensors are necessary for the robots to understand and interact with their surroundings. Depending on the task to be solved – object recognition, context understanding, navigation, quality control, safety monitoring – different sensors are necessary to enable safe robust analysis and performance.
NEW GRIPPER SOLUTIONS FOR NON - RIGID OBJECTS
- There has been a lack of suitable grippers that can handle non-rigid objects such as fresh meat (meat portions) from land animals and fish (fish fillets or portions). Such non-rigid objects often vary in shape, size and texture and cannot be handled with conventional robot grippers as two-jaw grippers or similar, developed for handling rigid material.

BIPED WALKING ROBOTS
- Biped locomotion is a highly efficient method of locomotion, which allows robots to move over difficult terrain by mimicking human motion. The general basis of this system is a robot with degrees of freedom that mimics either humans or other bipeds.

UNMANED AERIAL VEHICLES
- European countries have vast coasts and economic zones which go far into the Atlantic and Arctic oceans and which are challenging to monitor and manage. Moreover, the drive towards more remote locations and harsher environments demands new approaches and technologies.

MARINE VEHICLES
- As technology advances and demands for subsea resources increase, it is expected that deep-water and subsea marine vehicles will play an increasingly important role. Both above and below the ocean’s surface, autonomy will become ever more important.