Robotis

Videos
Loading the player ...
- Offer Profile
- Our main products include but not limited to the actuators/ servos, educational robotic kids which promote creativity among children, robot driven software, and training curriculum.
Product Portfolio
OLLO
- Robotics is a playful hands-on activity which sparks creative thinking for younger generation. Let’s Learn & Play with All Robots!
Education

Starter
-
- Introduction tom Robot Kit
- Building moving robots
- 12-Week Curriculum

Explorer
-
- Learning the basic principle for building robots
- Learning scientific theories while playing with robots
- Including 2 Geared motors and 1 controller
- 12-Week Curriculum

Inventor Expansion Set
-
- Learning the basic programming for robots
- Including 2 Servo motors, 2 Touch sensors, 2 IR sensors
- Programming Software, USB Downloader
- 12-Week Curriculum

Inventor
-
- Learning the basic programming for robots
- Including 2 Geared motors, 2 Servo motors, 2 Touch sensors, 2 IR sensors, 1 controller
- Programming Software, USB Downloader
- 24-Week Curriculum
Entertainment

Ollo Figure
-
- Build various character robots

Ollo Action
-
- Including geared motor
- Building moving robots

Ollo Bug
-
- Including controller and wireless remote controller
- Building various types of bugs
- linetracing, Wireless controlling game etc. are available
BIOLOID
- With Bioloid, you can create any types of robots
inspired by all living creatures.
Bio + All + Droid = BIOLOID
Bioloid is an educational robot kit which you can learn the basic of structures and principles of robot joints and expand its application to the creative engineering, inverse kinematic, and kinetics. It is also for hobbyists who enjoy building customized robots, and is the most frequently used robot kit for whom participate in various robot competitions. 
STEM
-
Main Controller CM-530 DYNAMIXEL
(servomotor)AX-12W : 2EA
AX-12A : 4EASensor IR-Array, IR Sensor S/W RoboPlus Power 6x "AA" or "LR6" Remote Control RC-100A
ZIG-110A set (optional)
BT-110A set (optional)Manual Workbook
(16 sample robots)Usage Éducation (School) Competition

Premium
-
Main Controller CM-530 DYNAMIXEL
(servomotor)AX-12A : 18EA Sensor GYRO, DMS, IR S/W RoboPlus Power LIPO 11.1V, SMPS 12V 5A Remote Control RC-100A
ZIG-110A set (optional)
BT-110A set (optional)Manual Quick Start (3 robots)
e-manual (26 robots)Usage Education(School/Univ.)
Competition/Entertainment

GP
-
Main Controller CM-530 DYNAMIXEL
(servomotor)AX-12A : 6EA
(Upper Body),
2EA(Gripper),
AX-18A :10EA
(Lower Body)Sensor GYRO, DMS S/W RoboPlus Power LIPO 11.1V,
SMPS 12V 5ARemote Control RC-100A
ZIG-110A set (optional)
BT-110A set (optional)Manual Quick Start
(1 robot+Gripper)
e-manualUsage Competition(School/Univ.)
Entertainment

Beginner
- The users can build and operate 14 types of robots so
that they can learn more about robot programming.
- CM-5 (Main controller) x 1pc
- DYNAMIXEL AX-12A
(Robot Exclusive Actuator) x 4 pcs - AX-S1 (Robot Sensor Module) x 1pc
- SMPS for external power (12V, 5A) x 1pc
- Rechargeable Batteries (9.6V, Ni-MH AAtype×8)
- CD with Software
- Assembly Manual (Quickstart)

Comprehensive
- The users can build 26 types of robots, from a simple
crossing gate robot to spider and humanoid robots and program the examples
so that they can learn more about robot programming. (It includes the
contents of Bioloid Beginner Kit)
- CM-5 (Main controller) x 1pc
- Robot Exclusive Servo
Dynamixel(AX-12A) x 18 pcs - AX-S1 (Robot Sensor Module) x 1pc
- SMPS for external power (12V, 5A) x 1pc
- Rechargeable Batteries (9.6V, Ni-MH AAtype×8)
- Full Set of Frame
- CD with Software
- Assembly Manual (Quickstart)
Dynamixel
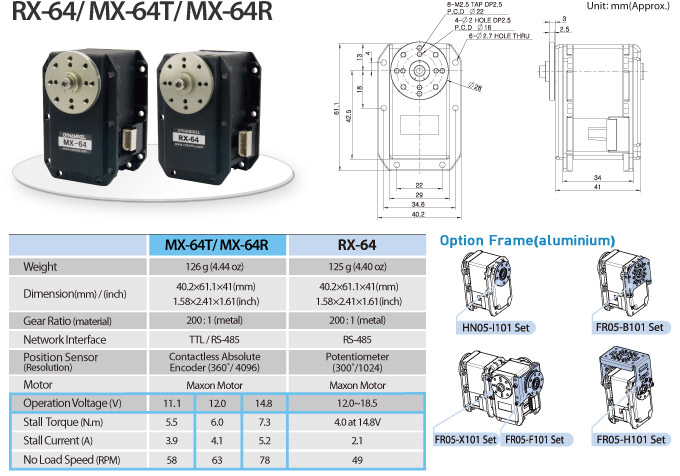
RX-64/ MX-64T/ MX-64R
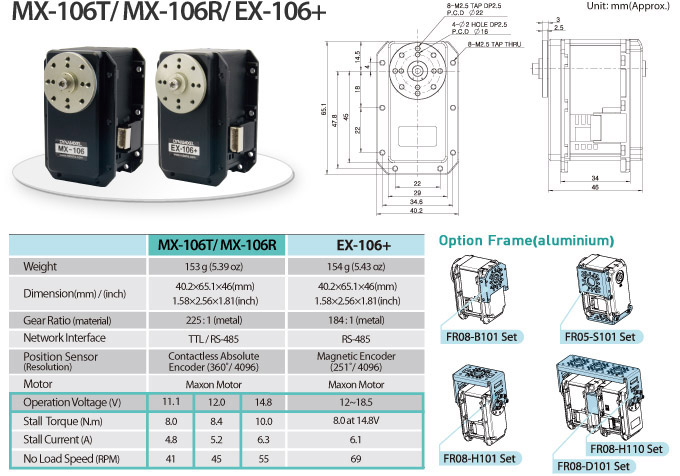
MX-106T/ MX-106R/ EX-106+
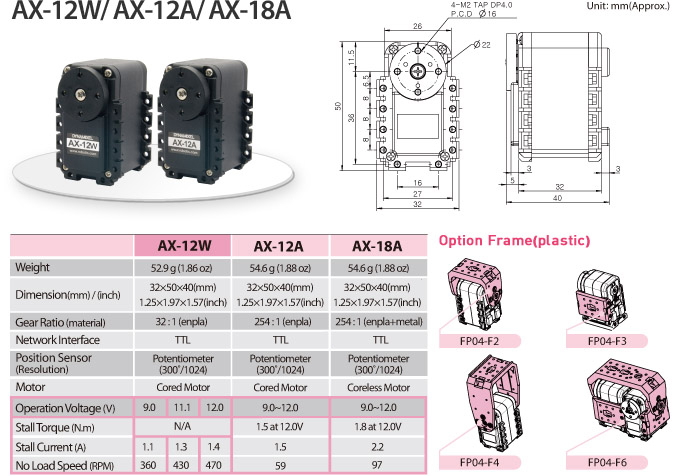
AX-12W/ AX12-A/ AX-18A
Dynamixel PRO
- High Power, High Precision. Full Modular Solution. Sophisticated Control Algorithms. Novel Gear Reduction System

Dynamixel PRO
-
- 1,000 pulse incremental encoder before gear reduction
- 4,096 step absolute encoder after gear reduction
- Electrical current sensing based control
- Internal temperature sensing
- Position-based command
- Torque-based command
- Speed-based command
- Cycloid type detachable reduction gear (Straight, Right Angle, Belt)
- Various communication physical layer (RS-485, CAN, TTL, Ethercat)
- Various optional frames
DARwin-OP
- Open Platform
Humanoid Project
DARwIn-OP (Dynamic Anthropomorphic Robot with Intelligence–Open Platform) is an affordable, miniature-humanoid-robot platform with advanced computational power, sophisticated sensors, high payload capacity, and dynamic motion ability to enable many exciting research and education activities. 
High Performance and Advanced Features
-
- Default walking speed: 24.0 cm/sec (9.44 in/sec) 0.25 sec/step - user modifiable gait
- Default standing up time from ground: 2.8 sec (from facing down) and 3.9 sec (from facing up) - user modifiable speed
- Built-in PC: 1.6 GHz Intel Atom Z530
on-board 4GB flash SSD - Management controller (CM-730): ARM CortexM3 STM32F103RE 72MHz
- 20 actuator modules
(6 DOF leg x2+ 3 DOF arm x2 + 2 DOF neck) - Actuators with durable metallic gears (DYNAMIXEL MX-28)
- Self-maintenance kit (easy to follow steps and instructions)
- Standby mode for low power consumption
- 3Mbps high-speed Dynamixel bus for joint control
- 3-axis gyro, 3-axis accelerometer,
button x3, detection microphone x2
Mobile Solution

R+ m.Task & R+ m.Design