|
Humanoids
The new generation of humanoid robots are expected to
co-exist together with humans sharing the same working space, assisting them
in various daily activities while exhibiting the same dexterity and body
movement capabilities as humans. The Humanoid Lab was established to promote
research efforts which target to develop the new generation of humanoid
systems that will allow the close interaction of these robots with the
humans within an advanced human-machine cooperation and information exchange
environment.
Key research activities in the Humanoids Lab include the development of
body-ware components and control techniques that will allow these newly
developed humanoids machines to interact with their environment and perform
tasks in a safe and energy efficient manner. |
|
|
|
The Lower Body of the
Child Humanoid robot ‘iCub’
Anthropomorphic design, natural and adaptive locomotion and human like
behavior and performance are some of the intrinsic features that have driven
the rapid growth of humanoid robots during the past decade. The body
development of such a humanoid platform that has the physical capacity of a
human being poses many challenges from the mechatronic point of view. These
must be addressed in a methodical and concurrent manner in order to
co-ordinate and integrate the various components that form the full and
complete mechatronic structure.
- The 'iCub' platform has as its aim the replication of the physical
and cognitive abilities of a 3½ year old baby. This "baby" robot will
act in a cognitive scenario, performing the tasks useful to learning,
interacting with the environment and humans.
- The small (104cm tall), compact size (<23kg and fitting within the
volume of a child) and high number (53) of degrees of freedom combined
with the OPEN approach for research in cognitive development form
fundamental differences from the many excellent humanoids already
developed.
Coming next
Work towards the development of the new generation of the 'iCub' robot is
already in progress. To enhance the iCub body we are currently investigating
different mechanical configurations of compliant actuator components. They
will be employed to upgrade and finally turn the 'iCub' robotic platform
into the first humanoid robot with a full active/passive compliant body. The
new 'iCub' will demonstrate superior robustness and high adaptability which
will permit a wider range of safe experimentation and interaction scenarios.
|
|
|
|
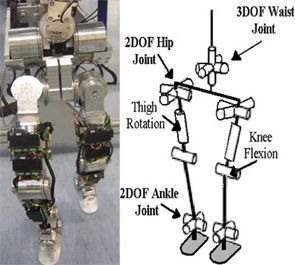
The assembly of the lower body
Within the Department of Advanced Robotics, the
mechanical design and realization of the lower body of the 'iCub' child
humanoid was evolved from the original design back in 2006 to its current
version which is shown in Figure 1 together with an overview of lower body
kinematics and location of the degrees of freedom. From the kinematic
perspective the lower body includes the lower torso (housing the waist
module) and the two leg assemblies. The height of the new 'iCub' lower body
from the foot to the waist is 671mm, with a maximum width and depth (at the
hips) of 176mm and 110mm respectively. The total lower body weight is 12.7kg
with each leg weighing approximately 4.35kg and the waist section including
the hip flexion motors weighing 4kg.
|
 |
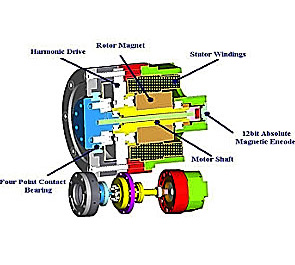
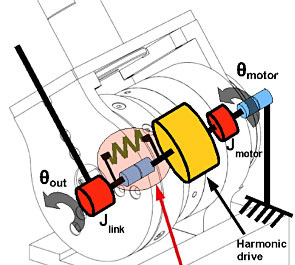
The actuation group
The actuation solution adopted for the new lower body is
the same with that adopted in the first prototype using a combination of a
harmonic drives(CSG series, 100:1 ratio for all joints) and a Kollmorgen RBE
series brushless frameless motor (BLM).
|
|
iCub Waist
The iCub's waist was realized using a mechanism where the
torque and power of the two actuators used for the upper body pitch and yaw
motions is transferred to these two motions using a cable based differential
mechanism
|
|
|
|
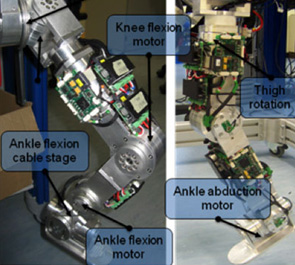
iCub Leg
The leg has a more modular structure allowing for easy
assembly and maintenance. In general the leg has an anthropomorphic
kinematic form with 6DOF consisting of; the hip, the thigh with the knee
joint, the calf with the ankle joint and the foot
|
|
|
|
|
|
|
|
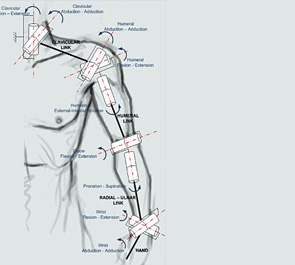
Biologically-inspired compliant robotic arm
One of the ultimate goals in humanoid robotics is
reproducing human‐like systems which follow accurate kinematic models and
can exhibit properties such as compliance. On one hand the research
community is trying to intrinsically include compliance in humanoid
structures, in order to assure safety even in a failure condition or to meet
energy consumption demands. On the other hand the majority of existing
robotic arms are made following a kinematic model that is a simple
approximation of the real kinematics of a human arm. The purpose of this
project is to embed both the features mentioned (compliance and accurate
kinematics) in an arm which will gain the benefits of a bio-inspired design.
A biologically-inspired kinematics can lead to several benefits in terms of:
workspace, dexterity, mobility, singularity avoidance if compared to a
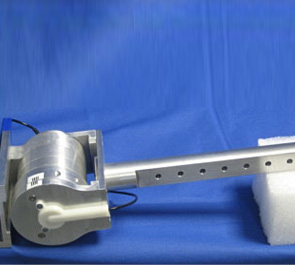
typical 7-dof arm. In this work the compliant actuation unit of Fig. 1 will
be used to embed compliance in the joints. Another field of interest which
can be included in this work is the development of safe-oriented control
techniques.
In the arm presented here it is expected that there will be benefits in
terms of:
- Safety
- Dexterity
- Workspace
- Mobility
- Singularity avoidance
|
|
|
|
Fig. 1 Compliant actuation module
|
|
Fig. 2 Collision safety tests
|
|
Fig 3. Bio-inspired kinematics
|
|
|
|
Dextrous Hand for the iCub
In order to maximise the dexterity of the iCub's hands
whilst achieving a compact design the current hands are under-actuated.
Although each hand has just 9 controllable actions they in fact both have 20
joints with multiple joints being powered by a single motor. However,
despite being perhaps the most compact dexterous hands developed they are
still a larger scale that the remainder of the iCub. Each hand is also
extremely expensive to manufacture due to the intricate machining required.
Project Aims
The aims of this project are:
- To produce a hand more appropriately scaled for inclusion on the
iCub robot.
- To increase the dexterity of the hand to more closely match a true
two year old child's hand.
- To identify a design and/or manufacturing technique to reduce the
financial cost of producing the hand.
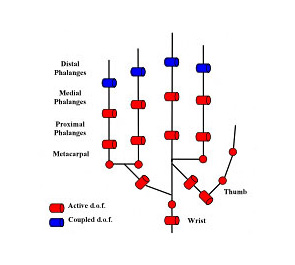
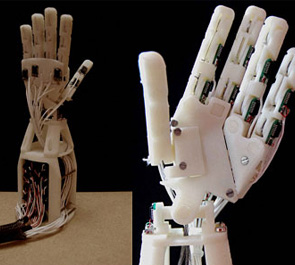
Hand Design
The hand developed consists of 22 degrees of motion of which 18 are
independently actuated and the remaining 4 (distal finger joints) being
coupled. The thumb and fingers have 4 degrees of freedom with the exception
being the middle finger which does not include lateral motion of the
metacarpal. Two additional degree of freedom are included in the wrist and a
further joint adds flexibility of the palm. The hand is cable/tendon driven
with actuators being located in the forearm.
The material used to form the hand needed to be lightweight and sufficiently
strong to enable small parts to be fabricated. Initially Aluminium was
chosen but high friction would mean bearings would be required and this
would increased complexity and therefore costs. Structural plastics have
superior friction performance and were investigated.
Complex components would require CNC machining or moulding which is
potentially expensive and so 3D printing was chosen. This allowed components
to be produced rapidly and for very little cost. The material used is ABS
which has both frictional and strength characteristics appropriate for the
task.
Prototype Finger
To assess the production technique and the suitability of the material a
single test finger was manufactured. A simple test rig was produced allowing
the finger joints to be repeatedly cycled through their range of motion.
After more than 1000 cycles of the finger it was inspected to identify any
areas of wear, none were found therefore increasing confidence in the
proposed materials and construction techniques. This allowed a full design
to be produced.
Sensors
Each of the directly actuated joints is fitted with an Austria Microsystems
programmable magnetic rotary encoder to measure joint positions. A diametric
magnet is placed at the centre of each joint and the encoder is then
positioned above this mounted to the proceeding finger link. As the joint
moves, so the magnet rotates beneath the sensors and a change in magnetic
field direction can be detected.
Palm
The palm is divided into three sections with the central palm attaching to
the wrist and the index and middle fingers. A second section of palm links
between the central palm and the ring and little fingers whilst a third
section mounts to the thumb. Forming the palm from three separate parts
means its shape can be changed by adjusting the relative angles between each
link. This allows the palm to adopt a flat position or to form a cup shape,
this ability is in line with a true hand and is used to aid grasping of some
objects.
Cost
One of the main requirements of the hand was that it be low cost. The 3D
printing technique means the manufacturing costs are considerably lower than
for the current iCub hand.
The cost of the hand breaks down as follows
- Motors €2000
- Sensors €250
- Mechanical components and miscellaneous parts <€1000.
- Overall cost of hand < €3500
|
|
|
|
|
|
|
|
|
|
|
|
Compliant Actuation
Until the last decade it was clear that the main
approach was the use of heavy, stiff position/velocity and torque actuation
units coupled with rigid non back-drivable transmission mechanisms. It has
become increasingly clear that this traditional stiff actuation approach has
significant performance limitations related to safety, efficiency and the
ability to interact with the environment. To address the latest a wide range
of experimental novel compliant actuation systems have been developed during
the past fifteen years.
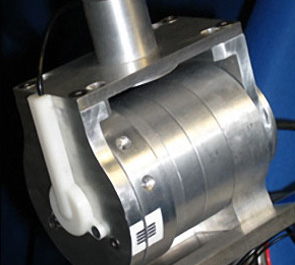
This project focuses on the development of a new compact soft actuation unit
intended to be used in multi degree of freedom and small scale robotic
systems such as the child humanoid robot "iCub" (www.robotcub.org) or the
Biologically inspired human-like arm developed at IIT . The miniaturization
of the newly developed high performance unit is achieved with a use of a new
rotary spring module based on a novel arrangement of linear springs.
This actuation platform exhibits the following characteristics:
- Series Elastic Actuator (SEA)
- High integration density
- Introduces fixed passive compliance
- Full joint state measurement
- Gearbox position
- Outer link position
- Joint torque
- Stiffness is tuned to a desired value (via active compliance
control)
- Use iCub compatible components
|
|
|
|
Figure 1 - The compliant module
|
|
Figure 2 - The Compliant Acuation Unit
|
|
Figure 3 - Kinematics of the Acutation Unit
|
|
|
|
Actuation and Power Systems
The increasing interest in developing robots for a
number of different applications requires an intensive innovation in the
actuation technologies and principles used in robot design.
The Actuation and Power System Lab aims at developing new actuation systems
while improving performance of the traditional technologies. The research
focuses on the development of adjustable compliant actuators based on
electric motors for improving energy efficiency e.g. legged robots and
safety e.g. manipulators. Pneumatic Muscle Actuators and hydraulic systems
using both oil and water are investigated for their high power/weight ratio,
an important feature for mobile platforms.
New systems for energy generation and storage, including fuel cells and
Stirling engines, are also explored.
|
|
|
|
Ttitel
Text
|
|
|
|
Title
Description
|
|
Title
Description
|
|
Title
Description
|
|
|
|
Ttitel
Text
|
|
|
|
Title
Description
|
|
Title
Description
|
|
Title
Description
|
|
|
|
Ttitel
Text
|
|
|
|
Title
Description
|
|
Title
Description
|
|
Title
Description
|
|
|
|
Ttitel
Text
|
|
|
|
Title
Description
|
|
Title
Description
|
|
Title
Description
|
|
|
|
Ttitel
Text
|
|
|
|
Title
Description
|
|
Title
Description
|
|
Title
Description
|
|
|
|
A
T
|
|
|
|
Ttitel
Text
|
|
|
|
Title
Description
|
|
Title
Description
|
|
Title
Description
|
|
|
|
A
T
|
|
|
|
Ttitel
Text
|
|
|
|
Title
Description
|
|
Title
Description
|
|
Title
Description
|