|
WorkPartner - Rolking centauroid service robot for
everyday outdoor tasks
WorkPartner is a mobile service robot, which works
interactively with people. It is intended for everyday life tasks in outdoor
environment. Work is done by the aid of a human-like two hand manipulator.
The hybrid locomotion system allows motion with legs and/or wheels at the
same time. Tasks are learned and executed in close cooperation with the
human operator.
Mobility
The locomotion system allows motion with legs only, with legs and wheels
powered at the same time or with wheels only.
Perception System
Passive vision fused with different types of ranging radars.
Navigation
Navigation is fully automatic in locally mapping of ab unknown environment.
Learning capability
The robot learns to perform skilled tasks when working interactively with
the operator.
Adaptive motion control system
The hybrid locomotion system provides rough terrain negotiating capability
and wide speed range at the same time.
Manipulation capability
The two arm manipulator is able to do humanlike tasks by manipulating
and/or using tools.
|
Field and service robotics
- Mechatronics
- Perception systems
- Navigation systems
- Teleoperation and remote handling systems
- Legged machines
Robot societies
Energy & fuel cells
- Control of hybrid electric vehicles
- Automation of fuel cell based energy devices (SOFC, DMFC, PEM and AFC
technologies)
- Automation of small scaled CHP plants for distributed energy production
- Inspection and remote handling in fusion technology
- In-vessel laser based vieving system
- RF-tomography for in-vessel emergency inspection
Home & building automation
- Next generation automation systems
- Agent technology based automation systems
- Home automation
- HMI technologies and telepresence
- Remote diagnostic and maintenance support systems
- Teleoperation of mobile robots and Working Machines
- Cognitive HMI technology
Submarine applications
Space applications |
|
|
|
WorkPartner
In the park
|
 |
WorkPartner
Holding a box
|
|
WorkPartner
Climbing stairs
|
|
|
|
WorkPartner
Driving outside
|
|
WorkPartner
Final demonstration
|
|
WorkPartner
Picking up trash
|
|
|
|
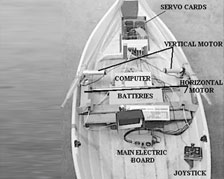
RoboBoat - The rowing robot
RoboBoat - The rowing robot Automation Technology
Laboratory has constructed the world’s (probable) first robot that rows a
boat like a human rower. Rowing as a locomotion process is very close to
walking. The oars correspond legs with distinction that the body does not
take support on them but on the supporting media (water in this case).
There are many interesting topics to be studied with the rowing robot. For
example, there is evidence that oars as propelling devices are more energy
efficient than a propeller when the speed is moderate under the displacement
velocity. Power output of an average human rower is only 100-150 W and with
a standard small rowing boat a speed around 2 m/s (3,5-4 kn) can be
obtained. The same speed to power ratio is hard to obtain with any small
outboard motors.
Roboticed rowing offers interesting possibilities to recover old rowing boat
cultures, like multi-oar Viking boats or big fishing boats, by assembling
several rowing robots on a same boat.
The test vehicle, shown in the picture, is a 4,0 m small standard rowing
boat. Weight without rowing mechanics, motors, batteries and control
hardware is about 70 kg. The total weight with all equipment is 210 kg. The
payload is still more than one person and the boat moves then with quite a
small propulsion force like 30-50N on calm water level below the
displacement velocity, which is about 1.9 m/s (3,7 kn). The propulsion
system of the rowing boat consists of two degree of freedom oars.
|
|
|
|
|
|
|
|
|
|
|
|
ARSKA - Autonomous robot for surveillance key
applications
Another important project in the past was the Esprit
II Panorama project Advanced perception and navigation system for Autonomous
Applications completed in 1993. In this project a generic perception and
navigation system for autonomous mobile robots moving in unstructured
outdoor type of environments was developed as an extensive European
co-operative work. The laboratory participated in this project as an active
partner. As concrete results today the laboratory has extensive knowledge on
perception and navigation technology and an advanced test vehicle ARSKA. It
has been further developed and is used as test bed when studying navigation
and perception systems, teleoperation and machine motion control methods of
autonomous mobile vehicles.
ARSKA is the laboratory's testbed for autonomous and teleoperated vehicle
research. The testbed is based on a robust four-wheel driven Honda ATV (All
Terrain Vehicle), which is instrumented for computer control. |
|
|
|
|
|
|
|
|
|
|
|
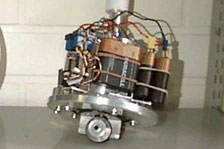
Rollo - Mobile
ball-shaped robot
Recent research in the field of mobile robots has also
produced a new innovative rolling ball robot. It has many interesting
features and challenges in motion control, environment perception and
navigation problems. Applications are being sought for in the field of
service robotics, in space exploration or in amusement industry. The ball
robot is a mobile robot based on a ball structure. It has many nice
features, for example it can be made easily liquid and gas proof, it
recovers easily from collisions, the cover can be made mechanically durable
and the robot can not turn over or fall down. The ball robot has also a
couple of interesting applications, one of them is an Internet based virtual
laboratory excercise and the other one a home robot acting as a mobile
communicator.
The locomotion and motion control systems are fully constructed inside a
ball. The control system on board is built on a micro-controller (Siemens).
Sensoring include encoders for the motors, attitude sensors and a rate gyro
for measuring heading changes. The robot is tele-controlled via radio-link
from PC. Dynamical properties, motion control and mechanics have been
studied with the prototype robot and simulator. Three different versions for
the IDU (Inside Drive Unit), both shown in the picture, have been built thus
far. The version shown on the right is mostly used today. This version was
mechanically designed and manufactured by our subcontractor Rover Company
Ltd (St Petersburg).
Patent number 960103, inventors; Torsten Schönberg, Aarne Halme |
|
|
|
Rollo - Generation 1
first trial (not working)
|
|
Rollo - Generation 2
the second prototype, which worked well
|
|
Rollo - Generation 3
the third prototype, which allowed transparable and
inexpensive cover.
|
|
|
|
Mobile multi-robot
societies
The research in mobile multi-robot societies was
started in 1992. Since then it has turned out to be a very attractive new
research field with rapidly growing international interest. The idea is
simply taken from Nature. A robot society is a colony of members or
"agents", usually small and simple, which can execute tasks together in a
co-operative way (imitating e.g. the way how social insects work). Several
small-sized test robots have been built in the laboratory. The first one was
HUTMAN, a minirobot used for studying a "model society".
|
|
|
|
MultiSLAM - Simultaneous localization and mapping in
distributed multi-robot systems
The objective of the research is to implement and improve
on simultaneous localisation and mapping methods in a heterogeneous
multi-robot system. Key research themes are dynamic environment, fusing
information from different sensor modalities, cooperative localisation and
mapping between heterogeneous robots and robust data-association. These
features are important in successful deployment of an autonomous multi-robot
system in a partially unknown and dynamic environment. The methods will be
tested on real multi-robot systems, some of which are currently under
development.
|
|
MULTI - Next generation multi-robot architecture
This research project is devoted to study, develop, and
experimentally test control architectures for future multi-robot systems.
Current architectures are more or less application-specific solutions that
are hardly generic in any sense. In the near future, the number of real
world multi-robot systems will increase rapidly and thus there is a clear
need for a basic framework for control architecture design. Both theoretical
and experimental methods will be used to demonstrate that the developed
structures and algorithms are indeed generic by their nature.
The basic tasks for the majority of the present multi-robot systems include
mapping and exploration of the mission environment. In this project, the
mapping task will be based on the development of suitable distributed SLAM
(Simultaneous Localization and Mapping) algorithms. The early development of
the algorithms will be performed in a simulator specially programmed for the
project but later on the preliminary results will be applied into two
separatereal world multi-robot systems. These systems, one being an
underwater system and the other an indoor system, will act as the final
development and testing tools. The test systems will be used to verify the
developed methods and algorithms for the future multi-robot systems
operating in various configurations in dynamic and unknown environments.
|
|
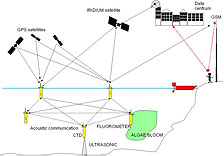
SWARM - Autonomous underwater multi-probe system for
coastal area / shallow water monitoring
The scientific objective of SWARM is to design, implement
and test a novel highly redundant underwater monitoring system for shallow
water ares. The system consists of multiple, homogenous, small size,
reasonably priced, robust and easy to use underwater robotic probes that can
perform two-week missions autonomously. The probes control their buoyancy
but move otherwise freely with the water flows. They communicate with each
other and with the control station (acoustic modem / radio / GSM /
satellite), and localize themselves. In addition to measuring the standard
variables (pressure, temperature, conductivity) the system observes certain
algal groups. Forecasts of algal blooms, their appearance areas and
dispersion patterns is extremely difficult. There exists no proper
monitoring system capable of continuously and widely enough covering the
critical areas. In this project a platform that can measure biological and
physical variability at the scale relevant for single event (meter -
kilometer and second-day scale) will be developed and tested in the Baltic
Sea.
|