
- Offer Profile
Research and training in the general area of Robotic Mechanical Systems.
The focus of our research is design and control of robotic mechanical systems at large as well as their mechanical components, such as drives and sensors.
Research
- A major activity here is the development of speed reducers meeting the strict requirements of robotic and mechatronic applications: zero backlash; zero friction; and unlimited stiffness. While meeting these demands is physically impossible, we are trying hard to do much better than gears. You will be able to see our prototypes of Speed-o-Cam, in two versions, planar and spherical. The former is intended to replace spur and helicoidal gears, while the latter bevel gears with straight and spiral teeth. We also have on display a virtual and a rapid prototype (courtesy of Ecole Centrale de Nantes' Dr. Damien Chablat, France) of Slide-o-Cam, intended to replace rack-and-pinion transmissions. On robot design, we stress robustness regarding their kinetostatic, elastostatic and elastodynamic performances. We are showcasing various projects, such as the Multimodular Manipulator System, or M3, composed of three modules, altogether forming a system with 11 controlled axes. We are also developing a four-degree-of-freedom parallel manipulator intended for motions proper of what is known as SCARA (Selective-Compliance Assembly Robot Arm) systems, most of which bear a serial architecture, which limits their load-carrying capacity, their positioning accuracy and their speed of operation. To counter these drawbacks, our parallel robot, the Schönflies-Motion Generator, offers the possibility of grounding all four motors and producing faster motions and more accurate positioning capabilities. We are also developing transmissions for wheeled robots with special features, allowing for accurate positioning, faster operations and unlimited rotation capabilities. I hope that you will find our work interesting!
Research Projects

Schönflies-Motion Generator (SMG)
-
A four degree-of-freedom
parallel-kinematics machine (PKM): three translations and one rotation about
an axis of fixed direction. The SMG bears features absent in the prior art:
The motion is transmitted to the end-effector by only two legs, the layout
being fully symmetrical in that all motors are assigned the same load. The
mechanical architecture of the SMG is patent-protected.
The McGill Schönflies-Motion Generator (McGill SMG) is a parallel robot capable of a special class of motions, those produced with serial robots termed SCARA (Selective-Compliance Assembly Robot Arm): three independent translations and one rotation about an axis of fixed direction. Such motions form a subgroup of the displacement group of rigid-body motions, termed the Schönflies subgroup.
Applications:
• Pick and place operations
• Palletizing
• Machining
• Medical manipulators
• Educational platforms
• Pharmaceutical setups

A Dual-Arm Isotropically Enhanced Robotic Environment for Trajectory Planning, Obstacle Avoidance and Force Control
-
The Dual-Arm Isotropically
Enhanced Robotic Environment is for:
• Trajectory Planning
• Obstacle Avoidance
• Force ControlA Collaborative Research and Development Project (with Concordia University and Bombardier Inc.)
• In this project, 2 redundant, 7-axis robots, REDIESTRO-1 & REDIESTRO-2, were designed to specifically address the problem of achieving reliable force control. The project involves the development of software and hardware required to use the two robots together in a dual-arm configuration.
• A significant effort was invested in enhancing our Robot Visualization System, that is used as a telemanipulation simulator.

Multi-Modular Manipulator
-
An 11-axis Multi-Modular
Manipulator (M3) designed as a cascade of three modules: The
Macro-Manipulator, the Cuatro Arm, and the Agile Wrist.
Possible applications:
To service and maintain aircraft and space structures
In error-tolerant tasks:
• cleaning
• brushingIn accuracy-demanding tasks:
• stripping
• deicing
• paintingPurposes of the prototype:
To demonstrate accurate positioning of the tool carried by the orientation submodule in the presence of vibrations of the base due to the flexibility of the gross manipulator.
Main Components of the System:
• Proximal Module (Gross Manipulator),
• Distal Module (Fine Manipulator):
-Positioning Submodule (Cuatro Arm).
-Orientation Submodule (Agile Wrist).

Dual-Wheeled Mobile Robots
-
Research on distributed robotics,
distributed information systems, sensor based robotics, and reconfigurable
systems.
Advantages:
• Two motors are mounted onto the platform
• Unlimited steering capability
• No wire entanglement problems
• Uniform tire-wear rate
• Two identical motors are used for driving
• Symmetry

CAD/CAE Software Packages
-
USyCams: a CAD/CAE software
for the interactive synthesis of cam mechanisms.
Features:
• especially suitable for indexing mechanisms;
• can handle planar, spherical, and spatial mechanisms;
• high quality rendering.
BEAVER: a CAD/CAE software package for the modelling of involute bevel gears. Features:
allows for on-line parameter changes;
• produces a database in a format readily transformable into G-code;
• based on the exact spherical involutes;
• high quality rendering.
SIXPAQ: a CAD/CAE software package for the interactive synthesis of six-bar dwell linkages. Features:
• any six-bar dwell planar linkage can be designed by simply choosing a reduced number of parameters;
• input-output plots and animation are available.

The State of the Art of Mechanical-Transmission Technology
-
United States Patent, No. US 6382938B2
A transmission mechanism, based on cam mechanisms, provides a viable alternative to conventional transmissions (e.g., gears, harmonic drives and direct drives).Motivation:
Speed-o-Cam
Gear transmissions entail drawbacks in robotics applications:
• backlash introduces unmodelled dynamics
• dry friction is unavoidable
• a gear is as strong as the weakest of its teeth
Harmonic drives solve above problems at the expense of:
• unacceptable high flexibility
• hysteretic effects that mar the dynamics of robots
• limited applicability: only coaxial shafts can be coupled
Conventional transmissions are unsuitable for mechatronic applications.
An alternative solution:
An innovative speed reducer intended to replace gears and harmonic drives.
United States Patent, No. US 6,382,0382
Advantages:
• Low friction
• Low backlash
• High stiffness
• Manufacturable with general-purpose CNC machine toolsThree versions:
• Planar, to couple parallel shafts
• Spherical, to couple intersecting shafts
• Convex planar, for higher machinability
Example of applications:
• Robotic actuators
• Mechatronic systems
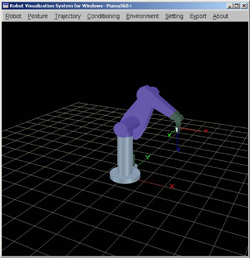
Robot Visualization System for Windows (RVS4W)
-
RVS4W is a cross-platform version
of its predecessor, the Robot Visualization System(RVS) written originally
by John Darcovich on Silicon Graphics' IRIX. The RVS4W user interface was
written from scratch, while keeping the user interface consistent and
user-friendly. The RVS kinematics engine was debugged and enhanced.
The package is a 3D visualization tool to be used as a design or a path-planning tool. RVS4W incorporates many new features, not in RVS, including routines to evaluate the characteristic length, the maximum reach, the optimum posture---for minimum condition number---and the robot conditioning (the reciprocal of the minimum Jacobian condition number).
RVS4W supports:
• Forward kinematics
• Inverse kinematics
• Joint limits
• Posture pre-storing
• Trajectory-tracking in joint space
• Trajectory-tracking in Cartesian space
• Maximum-reach, characteristic length and optimum-posture evaluation
• Robot-Jacobian evaluation at a given posture
• Condition-number evaluation at a given posture
• A snapshot of the scene to be saved in Encapsulated PostScript (EPS), Portable Document Format (PDF) or Scalable Vector Graphics (SVG) formats
• Display of reference frame, the moving frames and the EE frame
• Creation and visualization of work environments