- Offer Profile
- The Biomimetics and Dexterous Manipulation Laboratory, directed by Professor Mark Cutkosky, explores various aspects of robotics for manufacturing and for autonomous biomimetic systems, applying analysis, simulations, and experiments to the design and control of robotic hands, tactile sensors, and force-feedback devices for human-computer interaction. In manufacturing, work focuses on design tools for rapid prototyping. Other applications include small, biologically inspired robots with embedded sensors, actuators, and controllers.
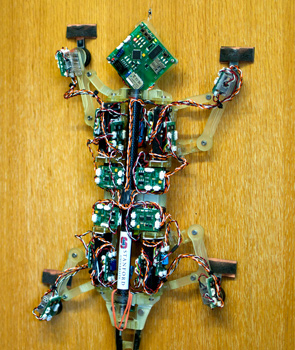
Stickybot
- Stickybot
is an embodiment of our hypotheses about the requirements for mobility
on vertical surfaces using dry adhesion. The main point is that we need
controllable adhesion. The essential ingredients are:
- hierarchical compliance for conforming at centimeter, millimeter and micrometer scales,
- anisotropic dry adhesive materials and structures so that we can control adhesion by controlling shear,
- distributed active force control that works with compliance and anisotropy
to achieve stability.
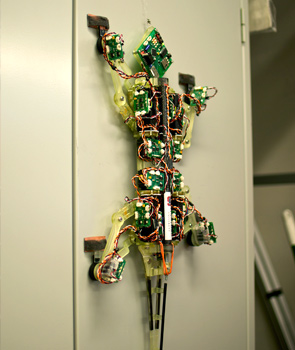
Stickybot III is the third iteration of the StickyBot platform. It has four legs, each with four degrees of freedom including actuation at the wrist to expand beyond vertical-only climbing of the first platform. Each motor has a local microprocessor-based servo controller. The feet are detachable, to allow us to interchange our various climbing technologies. Stickybot III can currently climb at 5 cm/sec. The robot has a snout-vent length of 36 cm, and the tail adds an additional 40 cm.
Goals- Reliable platform with low down-time.
- More freedom in motor actuation to allow new climbing research.
- Interchangeable feet.
- Actuation at the wrist to expand beyond vertical-only climbing.

Current Projects

Adhesive Climbing
- Climbing vertical surfaces with controllable, directional dry adhesives. Research includes the continued development of StickybotIII and new adhesives and manufacturing methods.

Mobile Manipulation
- Selectively compliant, under-actuated hands with tactile sensing. Research includes hand and grasp analysis and development of artificial skins with pressure, shear and dynamic tactile sensors.
MR compatible tools
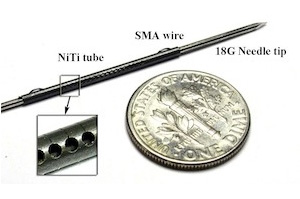
- Optical fibers are embedded in biopsy needles used for MRI interventions to provide realtime measurement of bending deflections and tip forces. Fibers transmit energy to shape memory alloy (NiTi) actuators for active steering.
Wearable Haptics:
- feedback for altering dynamic motions such as jogging or walking, to reduce the chance of injury or delay the progression of osteoarthritis. Projects include dynamic gait analysis and the development of wearable sensors and feedback devices.
Human-safe and human-centered robotics
- developing design tools and methods to mitigate impact damage during unintended human-robot interactions. Projects include collaboration with Prof. Oussama Khatib in the Computer Science Department on the Stanford Safety Robot, incorporation of capacitive skin sensors into robotic platforms for collision detection and post impact behaviors.
Tunable compliance and damping
- designing structures based on electroactive polymer actuators with electrically-tunable stiffness and damping properties for use in dynamic systems. Projects include control of damping through electrical boundary conditions and control of stiffness through design geometry and electrical activation as well as applications to the perching UAV.

Perching:
- Bio-inspired maneuvers, landing gear and attachment mechanisms enable a small unmanned air vehicle to land and perch on vertical and sloped surfaces
Pearching: UAVs that can land and perch on walls using adhesion technology derived from RiSE
- A flock of small, unmanned air vehicles flies quietly into a city, maneuvering among the buildings. They communicate as they search for places to land, not on streets or flat rooftops but on the sides of buildings and under the eaves, where they can cling, bat or insect-like, in safety and obscurity. Upon identifying landing sites, each flier turns toward a wall, executes an intentional stall and, as it begins to fall, attaches itself using feet equipped with miniature spines that engage small asperities on the surface. Using its propeller in combination with its limbs, the flier can creep along the wall and reorient for a better view. With opposed pairs of spines, the flier clings tenaciously to resist gusts of wind and ride out inclement weather. The fliers stay attached for hours or days, consuming little power and emitting no sound as they monitor the area. When finished, they launch themselves with a jump and become airborne again, ready for their next mission. (from Perching Whitepaper)

Perching UAV
- Sometimes the best place to land is on a wall...

Thrown glider landing and perching
- Foam core glider is thrown at a rough concrete wall. Ultrasonic sensor initiates pitch-up maneuver at ~5m distance. Landing occurs while velocity is partly forward and partly vertical, between 1-3 m/s. Success was achieved for 30/40 throws, albeit under fairly calm conditions. For engaging and gripping the surface, we use a nonlinear suspension and a special adaptation of spiny toes from Spinybot

Control
- We are basing our control on the Paparazzi open-source controller. Thus far we have achieved stable hovering with our small acrobatic plane. The next step is controlled lift-off after perching...
Haptics
- Various projects on tactile sensing for arms and hands, wearable haptic feedback devices and force sensing for MRI-compatible medical devices
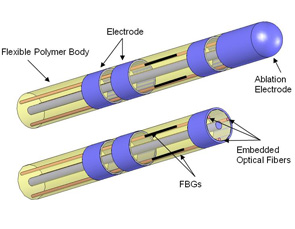
IFOS/NIH SBIR on Fiber Optic Tactile Sensing for Cardiology Applications
- Force and texture sensing for ablation catheters
using fiber optic sensors.
Background : Cardiac Arrhythmias
Cardiac arrhythmias are abnormal heart rhythms that can be develop throughout life. The heart rhythm can be abnormal either because it may be beating too slowly, too rapidly or becomes irregular. Arrhythmias are in the top 10 causes for hospital attendances.Caheter Ablation Therapy
Need for Contact Force/Tactile Sensing
Radiofrequency catheter ablation is a technique used to treat arrhythmia, an abnormal heart rhythm created by a disturbance in the heart's electrical system. Most catheter ablations utilize radiofrequency energy to heat the tip of a special catheter. Catheter ablation destroys or disrupts parts of the electrical pathways causing the arrhythmias. RF energy produces small, homogeneous, necrotic lesions approximately 5-7 mm in diameter and 3-5 mm in depth. Although catheter ablation has revolutionized treatment for arrhythmias and has become first-line therapy for some electro physiologists, the optimum protocol for energy delivery has not yet been determined recently [Greenberg, Haines]. Atrial fibrillation is a disorder found in about 2.2 million Americans. it was estimated that 30,000 to 35,000 catheter ablations for atrial fibrillation were performed in the U. S. in 2006.
It is well known that contact pressure (or force) of the ablation tip is one of the crucial factors which determine the lesion size [Haines, Muller]. This contact pressure is also critical to the formation of the lesion in cryoablation (cooled ablation) [Weiss#1]. If the contact pressure is too low, the ablation will take too long to burn the target tissues while there will be a perforation risk if the pressure is too high [Erick]. A large survey of 8745 patients who had undergone catheter ablation reported a complication rate of 6%, and 20% of the complications were cardiac tamponade which is caused by a perforation of the heart [NICE]. This rate takes the largest portion of the most significant complications. In case the ablation catheter perforates the heart, the blood may escape out of the heart. If enough blood becomes trapped in a rigid fibrous coat called pericardium which encloses the heart, the blood can compress the heart and prevent it from pumping normally. This is called “cardiac tamponade” [HRC]. Any intracardiac catheter has a risk of vascular perforation [Boston].
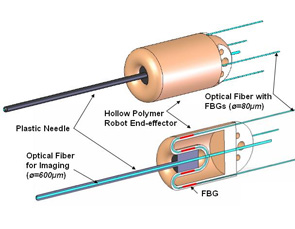
MRI-compatible haptics
- Force and deflection sensing for
MRI-compatible biopsy needles using fiber optic sensors
Background:The manipulation of minimally invasive devices
The manipulation of catheters, needles and other minimally invasive devices to reach tumors and other targets is the initial step of nearly all MRI-guided interventions. To date, most research on MRI targeting has focused on using MR to image the target, and to plan the trajectory of interventional devices.
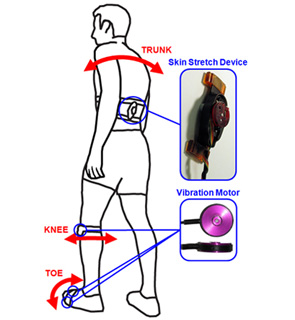
Haptics for Gait Retraining
- Project using haptics and other real-time feedback
modalities to inform and train subjects on new types of walking strategies
for medical applications.
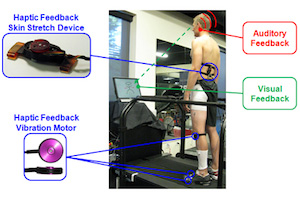
We are using haptic feedback, through vibration and skin stretch, along with visual and auditory feedback, to assist in training new walking strategies. The work is aimed at healthy subjects and osteoarthritis patients, in order to reduce joint loads and to prevent or treat osteoarthritis.
We use multimodal haptic feedback to train 4DOFs gaits. The 4DOFs are foot progression angle and knee angle (implemented with vibration motors), trunk angle (implemented with skin stretch device)

Skin Stretch
- In this project, we are investigating light-weight, low-power devices that augment vibration with stimulation of superficial slow-acting (SAII) mechanoreceptors. For unencumbering wireless displays, skin stretch is especially appealing as it does not require much power; motions and velocities can be low. It has been shown in previous research that mechanoreceptors respond quickly and accurately to skin strain changes and that humans are more sensitive to tangential forces than normal forces on the hairy skin of the forearms. However, in comparison to other haptic displays, devices that focus on skin stretch have received relatively little attention.
Portable Skin Stretch Device
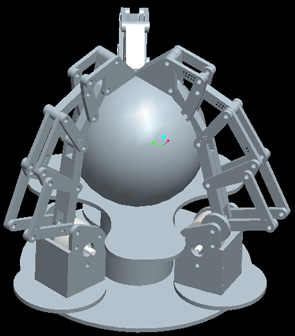
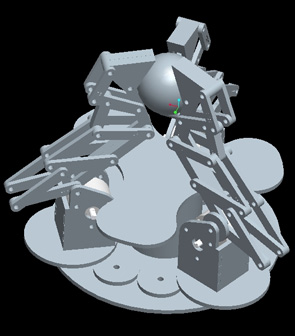
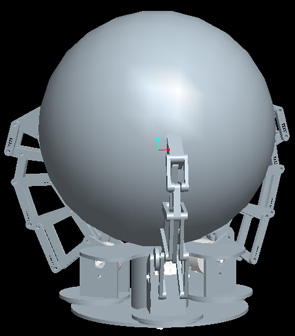
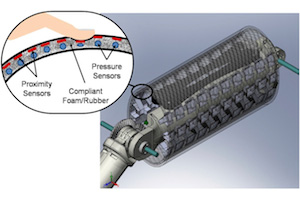
Seabed Rig: Underwater Robotics
- BDML is collaborating with Seabed Rig, a
Norwegian drilling company, on the development of an underwater
multi-purpose hand. This hand will be required to perform a variety of tasks
in an autonomous underwater drilling rig. The primary purpose is to afford
the sea-level personnel monitoring the rig the ability to deal with
unexpected situations; e.g. removing a bent/broken drill pipe, moving stray
hydraulic cables out of harm's way, or positioning objects during
repair/reattachment.
This unstructured task description demands a hand that is extremely adaptable in its ability to grasp varying objects. Additionally, the hand will be operated in a remote location for extended periods of time, requiring it to be exceptionally robust. These requirements have led us to focus on an underactuated design with three fingers. Underactuation decreases complexity and number of actuators to help achieve the goal of robustness while at the same time helping the hand passively adapt to a wide variety of objects.