
- Offer Profile
- Robotics research began 1972 at Tokyo Institute of Technology when the present director Prof. Shigeo Hirose successfully presented, for the first time, the snake-like robot ACM-3 to the world. Since then, we have constructed and designed many types of robots such as the walking robots, wheeled and crawler robots, etc. We always emphasize the importance of originality and try to develop practical robots for real use. Each major project is explained below, with a short description and appropriate figures and photos.
Snake Robots
- "Why can snakes move ahead on without legs?" From this problem, we started research of snake biomechanisms, which resulted in the development of "Snake Robots". Snake Robots have many possible applications, even though the structures are simple.

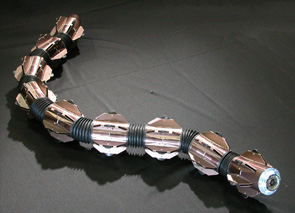
Active Code Mechanism No.3 "ACM III"
- (1972-1975). Photo. 1, shows Active Cord Mechanism model ACM III. On the evening of December 26, 1972, for the first time in the world we succeeded in producing artificial serpentine movement at a speed of approximately 40 cm/sec using the principles of a serpentine movement which is the same as actual snakes. The entire length of the device is 2 m, and it has 20 joints.

Self-contained Active Cord Mechanism-Revision3 "ACM-R3"
- (2001-) In 1995 Active Cord Mechanism - Revision 1 (ACM-R1), that is wireless controlled snake like robot, was developed. During about a half hour, this robot can promote with serpentine locomotion controlled of the velocity, the head-direction, and the swing of the wave. It is not only becomes twice faster than old type, but also higher mobility with serpentine locomotion at gently sloping.
Amphibious snake-like robot "ACM-R5"
- (2005-) Sea snakes live in water, and even terrestrial snakes sometimes show swimming on water surface. In fact, the mechanism of snakes’ propulsion is almost same both in water and on ground. An amphibious snake-like robot ACM-R5 takes advantage of this fact. It can operate both on ground and in water undulating its long body

Pneumatically-Driven Active Cord Mechanism "Slim Slime"
- (1999-) Slim Slime Robot is an ACM with three-dimensional workspace composed of serially-connected modules driven by pneumatic actuators. Slim Slime Robot has been developed aiming at its applications to operations dangerous to man: the in-pipe inspection at chemical or nuclear energy plants and the rescue of victims under collapsed houses by making use of its shape, and the mine detection by distributing its own weight and so on.

Articulated Body Mobile Robot "KORYU-II" (KR-II)
- (1989 ~)Large body robots are not maneuverableenough to negotiate turns in a cramped environment such as inside a nuclear reactor,on a fire location, or in ravine areas. On the other hand, small robots cannottransport the operational equipment that will be needed, nor even the energysources for their own operation. It is in this kind of situation that manifeststhe power of an articulated body, which can distribute loads and carry them,much like a train does.

Connected Crawler Vehicle for Inspection "Souryu I, II"
- (1997 ~) At the time of natural disasters like earthquakes, people who are trapped in broken buildings must be rescued immediately. But, it is very difficult and dangerous to creep into the debris to find sufferers. So it is desired to develop some machine that can maneuver in this environment in order to find these victims by TV camera and microphone.

Soft Gripper I, II, III
- (SG-I (1976), SG-II (1978), SG-III (1984)). The soft gripper is a snake-like mechanism that can flexibly grab an optionally shaped object. To flexibly grasp an object, it must be possible to create a uniform grasping force on all the gripper surfaces while wrapping around the object. This was accomplished in the action of the soft gripper in the following way.

Coupled Tendon-Driven Arm "CT Arm"
- (1990-1993) In order to conduct operations by reaching an arm into an environment complicated with machinery such as a nuclear reactor, etc., it is necessary to have an arm that can freely change shapes like the trunk of an elephant. However, this kind of multi-segmented manipulator must be equipped with an actuator that produces as large a movement as possible on the base segment, and this is difficult to be made light in weight.

Articulated Multi-Wheeled Mobile Robot "Genbu"
- Snake-like robot Genbu is characterized by multi bodies connected by passive joints and multi active wheels of large diameter. One of typical application of Genbu is Fire Fighting Robot as water discharger pulling fire hose. The robot is moved by hydraulic motor in the wheels using pump of fire engine. The hydraulic motor is also developing in our lab. Another application is the autonomous traveling rover for a probe of unapproachable disaster site or a planetary explorer.
Walking Robots
- Walking vehicles have the following unconventional features: 1) they can move on very rough terrain where wheeled and tracked vehicles cannot go; 2) they can select the footprint intelligently and move without continuous track; 3) they can use the legs as hands, as well as terrain adaptive outrigger, when performing handling operations.
TITAN IV
- (1985) TITAN IV was displayed at the Government Pavilion of the Science Exhibition at Tsukuba in 1985, and during the half year exhibition period it walked a total of approximately 40 kilometers continuing the round trip across a stage which had three different step levels as indicated in Photo. 4. In addition, afterwards it also realized static and dynamic fusion gaits in which gaits were automatically switched from a static state, a crawl gait, a dynamic state, and a trot gait, in which it walked using two diagonal legs alternately. TITAN IV walked at a velocity of 40 cm/sec.

Quadruped Walking Machine to Climb Up Slopes "TITAN VII"
- (1994- ). Japan has many mountainous areas, and the
construction of transportation facilities such as highways and railways is
carried out frequently. At present, workers have to climb up the slope to
engage in the task with their facing to the danger, shown in Photo 1.
To improve these circumstances, we have started to develop a mobile robot which can play a role as a mobile platform on the rugged and steep slope under construction. For the basic structure, we selected the walking style, because it can avoid obstacles and the leg can be also used as a powerful manipulator. And we adopted a quadruped, because four is the minimum number of legs to achieve a statically stable walk.

Quadruped Walking Robot for Steep Slope Operation "TITAN XI"
- (2002-)In mountainous Japan, mountains are frequently cut
and slopes are formed to construct railroad tracks and roads. These slopes
need reinforced concrete frames or rock-bolts or anchor-bolts to be
installed to prevent steep slope failure or landslides as shown in Photo.1
Drilling constructions are needed for these rock-bolts or anchor-bolts
construction and most of such processes have been performed manually.
However, these constructions are large-scale, expensive, time-consuming. It
is also dangerous, prone to falls and other accidents and there is a strong
demand for automation of some construction steps.
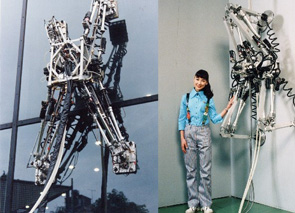
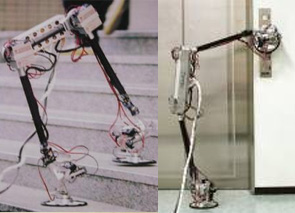
Quadruped Wall Climbing Robot "NINJA-I, -II"
- NINJA-I (1990-1993), NINJA-II (1994-). It is dangerous to inspect and perform all the operations on the exterior walls of high rise buildings and of the land bridges on high speed thoroughfares. It also requires a great deal of expense in order to install the needed scaffolding. NINJA is a wall climbing robot developed for the purpose of automating this kind of operation. Units No. 1 and 2 of both have a height of nearly 1.8 m , a left/right width of 0.5 meters, a thickness of 0.4 meters, and a main body weight of 45 kg.
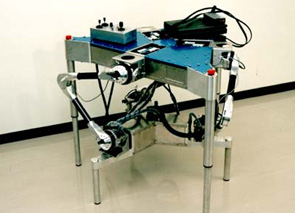
Leg-Wheel Hybrid Walking Vehicle "Roller-Walker"
- (1994-). At present, there are many studies about leg-wheel hybrid mobile robot because walking robot has high terrain adaptability on irregular ground but wheeled robot takes advantage of moving speed on smooth terrain. In the past, active wheels were often used for wheeled locomotion. However installation of active wheels restricted walking machine's ability very much. Because active wheels need actuators, brake mechanism and steering mechanism.
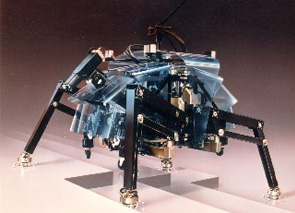
Parallel Link Walking Vehicle "ParaWalker-S1 , -II"
- (1992, Para Walker-S1) (1997~, Para Walker-II).
A practical walking robot should be a self-contained system with high terrain adaptability and high efficiency. But typical walking robots have 3 degrees of freedom per leg, leading to a large total number of DOF. Therefore, many actuators are required and such robots become heavy and need complicated control systems for controlling the many DOF.
As one solution to these problems, we developed Para Walker-II which has 6-DOF, the minimum of required to preserve the characteristics of walking robots.
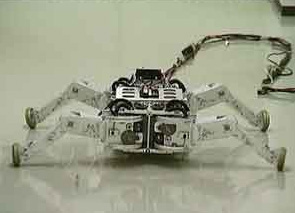
Walking and Task Performing Robot with Bipedal Configuration "YANBO III"
- (2000-) One of the Moving and Task Performing Robots, the legged-walking type, which has high terrain adaptability, is effective. But generally walking robots need so many degrees of freedom (DOF) that robots become heavy and its mechanism become more complicated. As one of the effective solutions to these problems, in this research, we are developing the Walking and Task Performing Robot with Bipedal Configuration, whose DOF has been reduced as much as possible keeping its required performance, and same mechanisms are used for walking and manipulation.
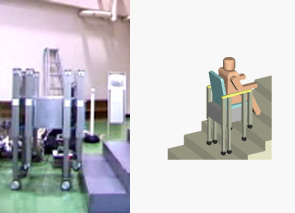
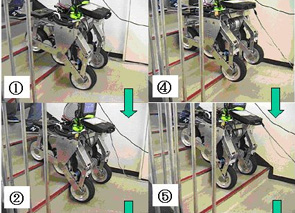
Stair-Climbing Robot "ZeroCarrier"
- Physically handicapped always use wheelchair to help
themselves move freely on ground by their mind. Not only the moving scope is
enlarged, some work also can be achieved. Even, it can be considered
effective on mental field. But, this kind of moving is almost on ground,
climbing stairs or moving against obstacle is still a difficult topic
nowadays. Therefore, to reduce the physical obstacle to elder and
handicapped such as stairs or bump wherever is expected. Facilities are
equipped in public (station, hospital, office, etc.) for the handicapped,
such as elevator and the machines, which assist wheelchairs to climb stairs.
As the high cost and low adaptability to environment, not all public spaces
could offer to equip such facilities.
Here, we try to develop a light, cheap, safe stair-climbing robot to assist wheelchair’s moving. Try to find a solution how the robot can go up and down the stairs and move over obstacle safely, while carrying the wheelchair in it.

Jumping Quadruped driven by pneumatic power "AirHopper"
- (2002~) There is quite a few legged robot that is
developed for rescue operation use nevertheless the main feature of walking
robot would be the high terrain adaptability in such a uneven terrain. The
walking robot that is researched until now cannot overcome the high
unevenness at the disaster areas. And the robot developed for rescue
operations must move much faster in wide area.
To satisfy such necessities, we will develop the jumping locomotion robot in this research. This jumping robot can move around the disaster areas where there are many high steps and obstacles that cannot overcome previous walking robot. This developed jumping robot has both high terrain adaptability and mobility.
Wheeled & Crawler Vehicle
- Locomotion is one of the key issues in the development of practical robotic systems. By using wheels and crawlers, locomotion can be greatly simplified without hampering mobility. The wheeled and crawler vehicles developed in our lab focus on field works and practical applications on unstructures terrain.

Terrain Adaptive Crawler Vehicles "HELIOS-I, II, TAQT Carrier"
- (1987, HELIOS-I) (1989, HELIOS-II) (1991 TAQT Carrier). Endless rotation movement such as in wheels and crawlers, etc. is suitable to make a vehicle that can move at high speed with good efficiency with a few degrees of freedom, but these robots are limited in their adaptability to the terrain. For example, when climbing stairs, in a vehicle with a high center of gravity, the center of gravity tilts toward the back and is unstable. With the improvement of providing a slider, a powerful actuator is required to pull the upper carrier along the incline surface. The pendulum model has good balance, but the center of gravity still drops.
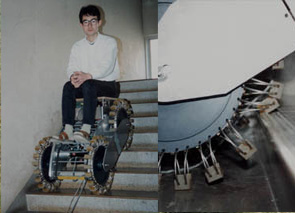
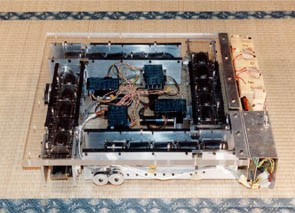
Stair-Climbing Wheelchair "HELIOS-III"
- (1990-). The development of an electric wheelchair for the elderly and the disabled that can go up and down stairs is desirable. We have developed a practical, active wheelchair which can reliably ascend and descend stairs. Photo. 1 indicates the first generation model. The problem of instability during the ascent and descent of stairs was solved by the RC (remote center) mechanism indicated in Fig. 1. When the inclination of the vehicle is detected by the posture sensor, the upper chair part moves so as to become horizontal, and at the same time the center of gravity of the vehicle is always maintained in the center of the vehicle. The drive system is a mechanism which pulls a timing belt along an arc shaped rail, and drives this with a motor provided in the upper part of the wheelchair. The RC mechanism is a practical mechanism with high rigidity, and later this was also used in the TAQT Carrier.
Terrain Adaptive Six-Wheeled Vehicle "HELIOS-V"
- (1997-2000) Currently, there is a great demand for the development of a platform for rough terrain vehicles that can ascend and descend artificial obstacles such as the stairs in a home, and travel over rough terrain at high speed with good efficiency. In the future, this platform will be applied to a powered wheelchair for the disabled and the elderly, a carrier vehicle to assist workers in carrying heavy loads, and a hazard maintenance robot. Here to fore, many kinds of off-road vehicles and machines for these requirements have been developed all over the world. However, these vehicles had some serious problems, as follows: (1) The vehicle speed is extremely slow on not only rough terrain, but also on flat ground. (2) The mobile mechanism is complex. (3) High output torque is needed to negotiate obstacles. In order to overcome these serious problems, we have been developing the "HELIOS-V", 6 wheeled off-road vehicle.

Terrain Adaptive Crawler Vehicle "HELIOS-VI"
- (2000-)The new Helios VI, the most recently designed
version, is a tracked vehicle that can easily climb stairs by the use of two
active arms. It has an asymmetric shape. One arm is basically used to put in
contact the crawlers with the first step and to assist the vehicle motion.
The other arm adjusts the payload position, changing the posture of the carrier. The acceleration and the translation motion of the carrier are controlled in order to maintain a constant posture of the chassis.
For steering, Helios VI requires low energy because the center of gravity is principally positioned in the front part of the vehicle (the chassis’ own the weight on the shaft of the driving pulley) therefore the turning resistance is significantly reduced.

Terrain Adaptive Crawler Vehicle "HELIOS-VII"
- (2002-) Helios VII, consists of two crawlers independently actuated by two motors respectively connected to the main body by actuators. Thus tracks can be rotated 360 degress relatively to the chassis. This feature can be utilized for stability control. The chassis acts as a base for an arm with four degrees of freedom.
TitlePipeline Mobile Robots "Thes-I, -II, -III"
- (1993-) Three types of pipe inspection robots, Thes-I, Thes-II, Thes-III, were developed for the gas pipes of 50mm and 150mm in diameters.
Holonomic Omni-Directional Vehicle "The VUTON"
- (1993). A transport vehicle for operation in factories, hospitals and warehouses, etc. must have omni-directional properties that can move and turn freely over narrow floor space in all directions. The "Vuton" is newly developed vehicle with the following features; i) it has the omni-directional property, ii) it also has holonomic property which enable instantaneous change of motion direction, iii) it has large payload capacity because of the wide contact area of the multiple driving wheels, iv) it does not damage the floor because of its properties of wide contact area and non slippage motion, v) it has flat and compact shape.

Holonomic Omni-Directional Vehicle "VmaxCarrier"
- (2000-) A transport vehicle for operation in factories,
hospitals and warehouses, etc. must have omni-directional properties that
can move and turn freely over narrow floor space in all directions. The
“VmaxCarrier” is newly developed vehicle with the following features; i) it
has the omni-directional property, ii) it also has holonomic property which
enables instantaneous change of the vehicle’s direction, iii) it has flat
and compact shape, iv) it is very light.
Colony Robots
- Colony robots have several possible applications, such as position identification, mapping, surveying and others. High terrain adaptivity, detachable mechanisms and redundancy for safety are amongthe advantages of the colony robots developed in our lab.
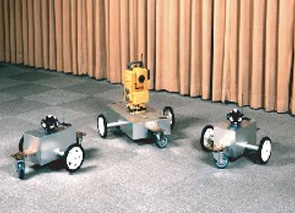
Cooperative Positioning System "CPS-I, CPS-II, CPS-III"
- For autonomous mobile robots, it is important to identify
the position where the robot located with high accuracy. Conventional two
methods, dead reckoning method, and landmark method have following defects:
1) dead reckoning method estimates the position of the robot by counting the
rotation of the wheels so that accumulation error of measurement is
unavoidable, 2) landmark method requires to place the landmarks beforehand.
Proposing method called "Cooperative Positioning System (CPS)" enables to identify the positions of moving robots with high accuracy even on rough and/or unknown terrain by positive use of multiple robots. Fig. 1 shows an example of CPS, which uses three moving robots. When robot 3 come to the position P3, robots 1 and 2 measure azimuth and elevation angles θ1, θ2, φ1, and φ2 relative to the robot 3 and identify its position. Then, robot 1, for example, moves forward as indicated by the dotted line and stops then robot 2 and 3 measure the relative angles to the robot 1 in the same way as previous measurement. This motion and measurement is repeated until they reach the destination.

Cooperative & Autonomous Robot "Gunryu"
- (1992~)The "Gunryu(GR)", meaning "a group of dragons" in
Japanese is a group robot, each segment of which has autonomy but at the
same time it can connect with the other segments to operate cooperatively.
The idea of a group robot with connecting ability is an old one. However,
there has been a problem until now. Unfortunately, connecting mechanism
tends to be very heavy that its weight largely limits the function of the
total system.
GR resolves this problem by introducing as arm, which is an indispensable gear for a robot. It serves as an active connecting mechanism as well as a manipulator for handling tasks.
Special Locomotion Robots
- Usual mobile robots have wheels, legs, etc. for their locomotion. Special robot's locomotions such as wall climbing were reallized with special mechanisms.
Swarm Type Wall Climbing Robot "Anchor Climber"
- (2004~)A large number of huge structures have been made, on the other hand, it is necessary to maintain and inspect them regularly to avoid from the danger of breaking by obsolescence and defects, etc. Structures have been maintained and insepcted by human workers with special skills. However, developments of wall climbing robots which can replace the human workers is pressing need from the view point of safety, cost, efficiency, etc. A high mobility and a large payload capability are important features for wall climbing robots. Unfortunately, conventional designs could only provide one or other but not both of these features at the same time. To solve this problem, we proposed swarm type wall climbing robot system, named Anchor Climber. This robot system is composed of two or more Child Units, which can stick firmly to the wall when in a stand-still state, and also can move freely and reliably on the wall with adequate adhering force not to fall from the wall during the moving state, and has a Parent Unit, which has control box, batteries, working devices, etc. Child Units and Parent Unit are connected with Connection Unit.
Casting Arm
- (2002-)On the irreguler ground in the disaster area, or steep slope in the mountains, it is very difficult for the wheel or track type vehicle to move around. Even the leg-type vehicle cannot get over so big obstacles. In such situations, we suggest the new method of movement by using surrounding objects such as trees, not moving on the ground. It throws the tether(wire) to surrounding objects and holds them, and moves by using the traction of the wire.
Medical Robots
- Research on smaller, simpler and more effective mechanisms can also be used to improve conventional medical applications.

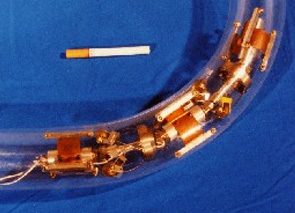
Active Endoscope "ELASTOR, Shape Memory Alloy Robot"
- (1980-1986). Because only the tips of the endoscopes currently being used can bend in two directions with conduit wires, the operation of inserting them into the stomach and colon is difficult, and requires a high degree of technique. For this reason, as one of the fields of utilization for serpentine robots, we have developed an active endoscope which can actively bend in order to conduct examinations for medical therapy and for inspecting the interior of complex machinery.

Steerable Endoscope for Laparoscopic Surgery "Endo-Periscope"
- Laparoscopic surgery is carried out by using long and
slender instruments that are inserted through small incisions in the
abdominal wall. Visual feedback is provided by an endoscope with a camera.
The incision point restricts the degrees of freedom (DOF) of the endoscope
from six to four. As a result, it is impossible to observe organs from
different sides while keeping the viewpoint in focus. This reduces the
surgeon’s ability to perceive depth.
In close co-operation with the Man-Machine Systems Group of the Delft University of Technology in the Netherlands, a new steerable endoscope for laparoscopy has been developed. The endoscope, called Endo-Periscope, is designed as a spatial parallelogram-mechanism with a miniature camera on the tip. The 6 DOF steerable tip can be used to observe organs from different sides. The handgrip contains an arrow that points always in the direction of the camera’s line-of-sight. This provides intuitive control of the tip, showing the surgeon how the camera is oriented in the abdominal cavity.
In-Service Inspection Robots
- In-Service inspections are of vital importance to nuclear power plants and other facilities. We have developed robots that are able to move and perform inspections automatically in such plants.
Nuclear Reactor In-Service Inspection Robot "GRIPEDE, MAGPEDE"
- (1980) In order to safely operate nuclear reactors, there must be periodic inspections (in-service inspections). Two kinds of robots to inspect the peripheral parts of the steam drums within the nuclear reactor were developed for this purpose.
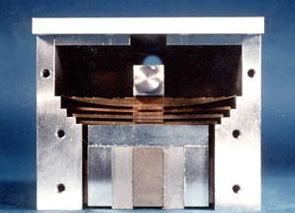
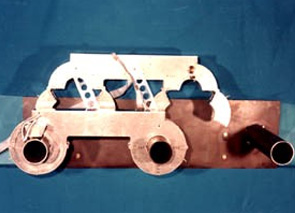
Internally Balanced Magnet "IB Magnet"
- (1981). In the past, several mechanisms were proposed to
peel off permanent magnets. The IB magnet proposed here is an entirely new
device, which can in principle peel off a permanent magnet with zero energy.
Wall Climbing Robot with Permanent Magnet Disk Wheels "Disk Rover"
- (1990-1992). This is a robot which uses permanent magnetic disk wheels to move around the steel walls of oil tanks and ships.
Planetary Exploration Robots
- Planetary exploration robots are under development in our laboratory, especially for surveying tasks in the moon and in Mars. Light-weight, expandable mechanisms and parent-children rovers are some of the main characteristics of such robots.

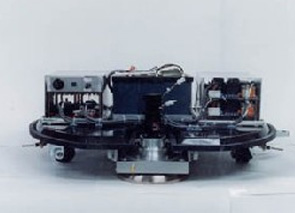
Expandable Three-Wheeled Rover "Tri-Star II"
- (1995-) At present, many companies are planning to launch unmanned robot rover vehicles for planetary exploration. We are developing Tri-Star II as a joint research project with NASDA, Japanese NASA. Tri-Star II has three wheels that are eccentrically supported by vertical rods and can perform several functions, such as, expansion from housed to expanded posture, Omni-directional steering motion, and avoids being trapped on sandy ground. These functions can be achieved by the cooperative drive of active wheels and latches, in order to fix and release the wheel rotation around vertical eccentric rod, and of the sliding motion of the inclined slide arm. The expansion is also aided with the synchronized up motion of the hoist. Tri-Star II’s wheels are composed of stainless steel leaf springs and are able to expand three times in volume.
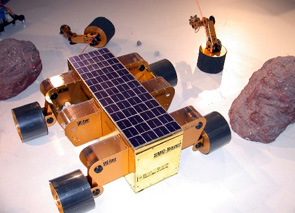
Parent-Child Type Planetary Rover "SMC Rover" and Arm-Equipped Single Wheel Rover "Uni-Rover"
- (1997-) As one of the main research subjects of COE/TITech Super Mechano-System project, we have been studying a heterogeneous planetary rover system composed of decentralized autonomous agents (child rovers) and a leader agent (parent unit).
Mine Detecion and Removal Robots
- There is a large numbers of landmines deployed all over the world, injurying and killing civilians every day. We are developing and researching instruments and systems for mine detection and removal with the support of Japan Science and Technology Corporation.

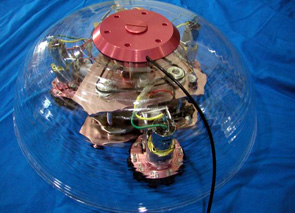
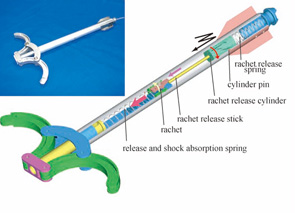
Mechanical Master-Slave Hand for Demining "Mine Hand III"
- Large numbers of landmines are buried in troubled countries such as Afghanistan and Cambodia. Therefore, there is a great demand for removal equipments and methods. Although some methods for removal of landmines have been proposed, the final operation is still done by human hands. By feeling and sight, deminers carefully dig the ground with their probes, take off the soil to reveal the landmines and finally destroy them through explosion. To make this task safer, we have developed a remote-operated mechanical “Mine Hand.” Mine Hand allows the deminer to operate the hand in low sitting posture while watching the task through rugged and transparent shield and thus perfectly protected against explosion. The hand is directly manipulated by rods to give the deminer a feel for the digging process. Strong pressure can be exerted on the “Mine Hand” by kick-down motions of the legs to the sliding pedals. “Mine Hand” is lightweight and wheeled, thus making it easy to transport to the demining site.

Arm Mounted Buggy Vehicle for Demining Operation "Gryphon-V"
- Scanning of mine fields by metal detectors and mine dogs are the most widely used methods in demining operation. Though heavy machines such as frail and tiller types are also commonly used, they cannot perfectly clear the mine field, thus manual demining operation is still required. Gryphon is developed to make this manual task safe and efficient. It consists of a buggy vehicle with a long reach weight-balanced arm mounted on it. The buggy vehicle can be manually driven from base to the mine field. In tele-operational mode, Gryphon moves along the borders of the mine field while reaching out with the arm into the field. Using stereovision, the unevenness of the terrain is first measured and then scanned by mine sensors. The position of the mines can be precisely recorded by GPS and marked by paint or small paddles. Electricity is provided by the power generator of the buggy vehicle and can be operational a full day without refueling. In 2007, we undertook several experiments in Cambodia and Croatia. In Croatia, for example, we could prove that the Gryphon-V with metal detector and its special signal map processing system detected mines better than human deminers. We are now researching how we can include grass cutting and tele-operated digging task to achieve the perfect humanitarian demining system.