Navigation : EXPO21XX > AUTOMATION 21XX >
H05: Universities and Research in Robotics
> University of Michigan
University of Michigan

Videos
Loading the player ...
- Offer Profile
- The Mobile Robotics Laboratory develops and prototypes experimental mobile robot systems including innovative mobile robots, obstacle avoidance systems, positioning systems, and robotic aids for the disabled.
Product Portfolio
Innovative Mobile Robots

MDOF Robot
- UM's Multi-Degree-of- Freedom (MDOF) vehicle is fully omni-directional (can travel in all directions and rotate at the same time).
- Unique, patented compliant- linkage absorbs momentary controller errors to avoid wheel slippage.
- Recovery from actuator failure:
- Vehicle can be moved and controlled remotely even after a motor, power amplifier, or other critical component fails.

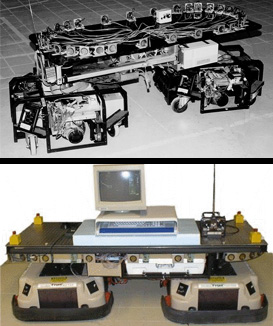
CLAPPER
- UM developed a new method for odometry error correction that was implemented on UM's MDOF vehicle, now named "Compliant Linkage Autonomous Platform with Position Error Correction" (CLAPPER).
- CLAPPER uses its redundant encoders to constantly measure the relative position and orientation of its two "trucks."
- Each truck can detect and correct odometry errors in the other truck.

OmniMate
-
- In 1995 the Oak Ridge National Lab (ORNL) - required a highly accurate mobile robot for their "Mobile Mapper" project.
- ORNL found that no commercially available robot met the requirements, while UM's CLAPPER came close.
- HelpMate Robotics Inc. and UM built the first commercial CLAPPER, called OmniMate.

OmniTread
- The OmniTread serpentine robot is designed to
traverse extremely difficult terrain, such as the rubble of a collapsed
building.
The OmniTread can also drive over sand and rocks. It can pass through small holes and climb over tall obstacles.
Innovations:- Use of pneumatic bellows for joint actuation. Bellows are powerful, naturally compliant, and take up minimal space.
- Maximal coverage of all sides of all segments with extra wide moving tracks.
- Unique pneumatic control method allows simultaneous proportional control of stiffness and joint angles.
- The "drive shaft spine" is powered by a single electric motor in the center segment. The spine runs through the center of all segments and provides torque to all tracks.
Segway RMP
- We received from the DARPA MARS program a Segway Robotics Mobility Platform (RMP)
-
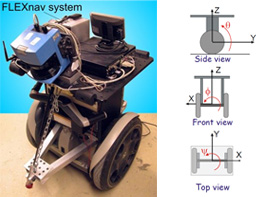
We equipped the Segway RMP with our precision FLEXnav proprioceptive*
position estimation (PPE) system.
*) "Proprioceptive" means "without external references" - We equipped the Segway with obstacle avoidance capabilities.
Obstacle Avoidance

CARMEL
- CARMEL is the oldest mobile robot at UM; since 1987.
Test bed for developing VFH obstacle avoidance method.- VFH is widely used.
- VFH compensates for inaccuracies of ultrasonic sensors.
- We believe VFH to be the fastest obstacle avoidance method demonstrated to date.
EERUF
- Problem with multiple sonars: One sensor picks up echo from other sensors; registers false reading.
- • Most systems wait for long time before firing next sonar Þ slow travel speeds.
- • UM developed patented Error Eliminating Rapid Ultrasonic Firing (EERUF).
- • With EERUF sonars can fire fast, producing data for obstacle avoidance at travel speed of 4 feet/sec.
OmniNav
-
- OmniNav is a new method that provides obstacle avoidance for non-point, omnidirectional mobile robots.
- • Problem is more difficult than obstacle avoidance for point-like robots.
- • UM is currently investigating the feasibility of a method based on multiple VFH "act-on" points.
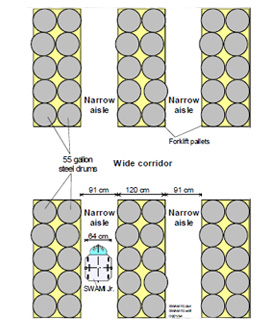
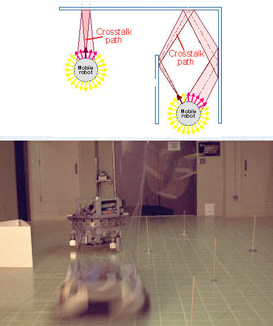
AisleNav
- • UM developed a new approach to navigating a mobile robot through narrow aisles.
-
• Key requirement: entry, exit, and travel within
the aisles be 100% collision-free
- • Requirement hard to meet with sonars, because of specular reflections and crosstalk causing false range readings.
- • UM's solution based on:
- • optimized location of sensors
- • only accurate radial range used readings for servoing.
- • inaccurate range readings used only for "yes/no" decisions.
Tacitical Mobile Robots
-
In 1998 we ported our VFH/EERUF obstacle avoidance
technology to so-called Tactical Mobile Robots (TMRs).
- In this DARPA-funded project we developed highly reliable obstacle avoidance methods for mobile robots operating in hostile environments.
Micro-controller Interface Board
- In the course of the TMR project it became apparent that a small-footprint hardware implementation of the EERUF method would be of great benefit to small mobile robots.
- • Consequently we implemented EERUF and other functions on a board the size of a floppy disk.
- Because of strong interest from other mobile robotics researchers, we have made the MCIB commercially available.

Obstacle Avoidance Testbed
- Comprises a computer-controlled motor-driven 4 meter linear motion table and a stationary pan/tilt table.
- Objects (=obstacles) can be hurled toward an obstacle avoidance sensor (e.g., sonar) mounted on the pan/tilt table (or vice versa).
- Allows for accurate reproduction of dynamic obstacle detection conditions, under fully controlled, dynamic conditions.
- Unique testbed, likely only one of its kind in the U.S.
Mobile Robot Positioning

UMBmark
- UM developed benchmark test for odometric accuracy of
mobile robots, called "UMBmark."
- UM tested six different vehicle configurations with UMBmark:
- TRC LabMate, differential drive.
- Cybermotion K2A synchro drive.
- CLAPPER MDOF vehicle.
- Remotec Andros, tracked vehicle.
- Andros with encoder trailer.
- Smart Encoder Trailer (simulation).
- UM tested six different vehicle configurations with UMBmark:
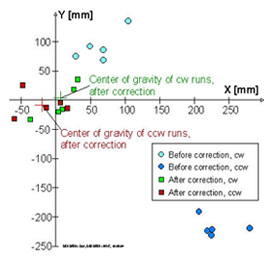
Calibration
- UM developed novel method for calibration of mobile
robots
- Method based on UMBmark.
- Applicable to differential drive vehicles (e.g., LabMate).
- Reduces systematic errors by one order of magnitude.
- Method can be applied fully automatically.
- Method tested and confirmed by other researchers.
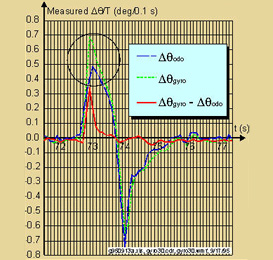
Gyrodometry
- Other problem: bumps or cracks on the ground can cause large errors in odometry.
- UM is developing new methods to reduce such "non-systematic" errors.
- Recent UM development: "Gyrodometry." Uses data from gyroscope to detect and correct non-systematic errors.

Navigation Book
- In 1994 ORNL requested a report on mobile robot positioning methods.
- In response, UM surveyed the literature, talked to companies, and produced the most comprehensive survey of its kind, the "Where am I" report.
-
Because of its general importance, the UM report was:
- published in book form,
- published on CD-ROM,
- and posted, in its entirety, on the Internet.

Gyro calibration
- UM developed method for accurate calibration of
fiber-optic gyroscopes.- Provides 10 times greater accuracy than manufacturer's original gyro.
- TOP:
Gyro calibration: Typical gyro output errors with the manufacturer's original calibration - BOTTOM:
Errors are reduced by more than one order of magnitude after applying UM's new calibration method.
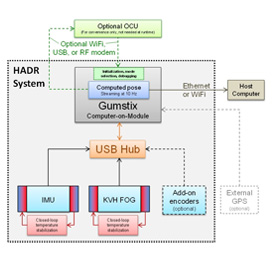
High-accuracy Dead-reckoning System
- Key features of HADRS
- Works on any wheeled or tracked ground vehicle.
- Works on any terrain, including rugged, steeply inclined terrain.
- Requires only a power connection and wheel/track encoder data from the host vehicle. Optionally, system can use encoder data from our retrofittable add-on encoders, making it independent of host vehicle encoders.
- Works without GPS, computer vision, beacons, or any other external references but can accommodated and integrate optional external GPS.
- Is indifferent to environment: indoors, outdoors, urban, or rural.
- Is small-sized and fits into 1/3 Packbot payload bay (rev.2, under development, is even smaller: 6.23x2.87x3.25 inches).
- Is designed for minimal power consumption.
- Outputs JAUS compatible, time-stamped X, Y, Z, and heading data stream at 10 Hz.
- Outputs data via Ethernet, WiFi, RF, or long-range RF data modem.
- Is unaffected by extreme operating temperatures or sudden changes in operating temperatures.

Leader-Follower Navigation
- Purpose:
- Enable a mobile robot to follow a walking human leader without GPS and without line-of-sight.
- Principle of operation:
- Leader wears our Personal Dead-reckoning (PDR) system.
- Follower has dead-reckoning capability (typically: IMU & Odometry).
- The two dead-reckoning systems communicate via RF modems.
- Our Leader-Follower method synchronized both dead-reckoning systems.
- Expected Performance:
- Follower tracks leader for unlimited duration in any environment.
- Follower may lag behind leader by 2-60 seconds. No line-of-sight needed.
- Purpose:

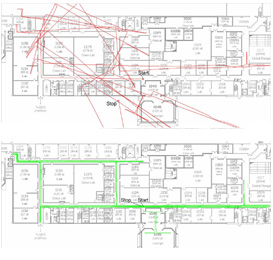
Precision Indoor Tracking of Tele-operated UGVs
- Purpose:
- To facilitate tele-operation of UGVs by providing tele-operator a GPS-like visual trajectory when UGV is driven inside buildings.
- Principle of operation:
- Uses low-cost gyro together with UGV�s built-in odometry.
- Uses our patent-pending Heuristics Drift Elimination (HDE) method to eliminate effects of all gyro errors, including gyro drift.
- Does not require GPS, RF beacons, or fiducials.
- Performance:
- Zero heading errors in runs of unlimited duration!*
- Average position errors <1% of distance traveled!*
- Purpose:
NASA Mars Rover 2009
- NASA-funded project aimed at developing a high-accuracy dead-reckoning system for the Mars Rover 2009 mission.
- We built "Fluffy," a fully functional 1/2-scale clone of the NASA Fido-class Mars Rovers.
- We implemented our Fuzzy Logic Expert Rule-based navigation (FLEXnav) method on Fluffy.
- We optimized the FLEXnav system for the unique wheel slippage conditions on sandy soil.
- Main Innovation:
Wheel slippage detection and correction by slippage monitoring
Heuristic Drift Reduction
- Many vehicle tracking systems use GPS as the primary sensor and a gyro plus odometry as a secondary sensor. The latter helps compute the vehicle�s position during GPS outages.
- The problem with this approach is that low-cost gyros have high drift rates, which result in large heading errors after just a few seconds or minutes.
- Heuristic Drift Reduction (HDR) estimates the momentary bias drift of the gyro based on tested and proven heuristics, and then subtracts that estimated drift from the gyro's output.
- The result is a dramatic reduction of the effective drift, which results in up to two orders of magnitude lower heading errors!
- HDR requires no hardware at all. It is a small software segment that can be added to any existing program code.
- HDR works with any gyro or IMU; it is most effective with low-cost/high-drift gyros.
Pedestrian Tracking

Indoor Pedestrian Tracking
- Principle of operation: Foot-mounted IMU
Features- Records and transmits the position of a walking or crawling person.
- Eliminates effect of accelerometer drift with every step.
- Uses patent-pending Heuristic Drift Elimination (HDE) algorithm to eliminate effects of MEMS gyrossensitivity to linear acceleration and drift.
- Works with walking/jogging/crawling/skipping forward/backward/sideways/any direction.
- Average heading errors near zero in walks of unlimited duration!
- Average position errors <1% of distance traveled in walks > 30 min
- Average elevation (Z-axis) errors: < 1 m.

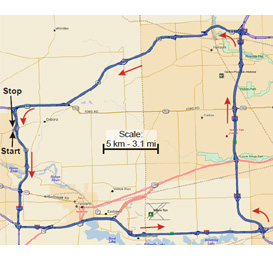
Outdoor Pedestrian Trackin
- Principle of operation: Foot-mounted IMU
Features- Records and transmits the position of a walking person.
- Does not require GPS.
- Does not require beacons or any other external reference.
- Eliminates effect of accelerometer drift with every step.
- Does not require user-specific calibration*.
- Records and (wirelessly) streams position data in real time.
- Average position error during the 2-mile ascent: ~0.5% of distance traveled.
- Largest position error during the 2-mile ascent: < 40 meters.
Indoor Segway Tracking
- Heuristics-enhanced Odometry (HEO) eliminates odometry
heading errors when used indoors, in structured environments.
Features:- Does not require any sensors other than wheel encoders for odometry.
- Does not require beacons or any other external reference.
- Works in real time, requires only 20-30 lines of C code.
- Provides near-zero heading errors in drives of unlimited duration and distance*.
- Provides position error <1% of distance traveled*.
Robotics Aids for the Disabled

NavChair
- UM developed "NavChair" for severely disabled users.
- Some users cannot control their wheelchair accurately with a joystick, because of tremor or other limitations.
-
Obstacle avoidance on NavChair overcomes these problems:
- User gives general direction of travel with joystick; NavChair follows this direction.
- When obstacle is encountered, NavChair steers around it while trying to maintain user-specified direction as closely as possible.
- UM developed "NavChair" for severely disabled users.
NavBelt
- Similar to NavChair approach, UM developed "NavBelt" for the blind.
-
Uses UM's obstacle avoidance:
- • instead of issuing steering signals to the robot controller, NavBelt generates acoustic cues conveyed to the user via headphones.
-
NavBelt's limitations:
- Required hundreds of hours of training before users could respond to the acoustic cues in time, even at slow walking speeds.

GuideCane
- Promising solution to guidance of the blind: UM's "GuideCane" with ultrasonic sensor-based obstacle avoidance
-
Steers around obstacles
- steering action is immediately felt by the user, who then follows the altered path prescribed by the steered sensor head.
- Main advantages of the GuideCane:
- Fully automatic obstacle avoidance
- Completely intuitive operation, requires no training at all.
- Maintains position information by combining odometry, compass, and gyroscope data.