Navigation : EXPO21XX > AUTOMATION 21XX >
H05: Universities and Research in Robotics
> Harvard University - HBL
Harvard University - HBL

Videos
Loading the player ...
- Offer Profile
- Our research focuses on the role of sensing and mechanical design in motor control, in both robots and humans. This work draws upon diverse disciplines, including biomechanics, systems analysis, and neurophysiology. The main approach is experimental, although analysis and simulation play important parts. In conjunction with industrial partners, we are developing applications of this research in biomedical instrumentation, teleoperated robots, and intelligent sensors.
Product Portfolio
Surgical Robotics

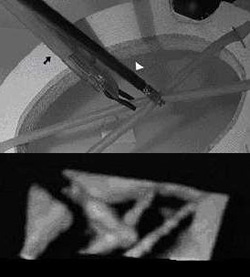
3D Ultrasound-Guided Robotic Motion Compensation for Beating Heart Intracardiac Surgery
- Traditionally, surgeons have coped with heart motion during cardiac surgery by stopping the heart and using the heart-lung machine to pump and oxygenate the blood. There is great interest in avoiding the use of the heart-lung machine because it has serious side effects. Furthermore, the outcome of a surgery on a stationary heart is challenging to predict. Beating-heart surgery prevents the morbidities associated with the heart-lung machine and potentially improves surgical outcomes by allowing the surgeon to evaluate the repair during the operation. However, this type of procedure is difficult for surgeons to perform because of heart motion. We have developed a 3D ultrasound-guided motion compensation system that tracks heart motion and allows the surgeon to operate on the fast moving structures of the beating heart without risk of damaging them.
Guiding Intracardiac Beating Heart Procedures With Real-Time Three-Dimensional Ultrasound
- To perform procedures inside a patient's heart (intracardiac surgery), cardiopulmonary bypass is necessary so the surgeon can work on a relaxed open heart. Although this technique is the current standard, new studies have identified numerous adverse effects of a cardiopulmonary bypass. Minimally invasive procedures could eliminate the need for a cardiopulmonary bypass, thereby allowing the surgeon to work directly inside the beating heart. Unfortunately, there currently is no suitable imaging modality to facilitate intracardiac beating heart surgery as traditional endoscopes are ineffective due to the opacity of blood. However, recent developments by Philips Medical Systems have yielded a new real-time three-dimensional ultrasound system which may enable beating heart intracardiac surgery.
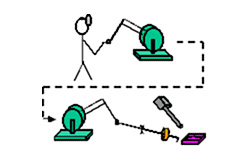
Force Feedback in Surgery: An Analysis of Blunt Dissection
- Force feedback is widely assumed to enhance performance in robotic surgery, but its benefits have not yet been systematically assessed. In this study we examine the effects of force feedback on a blunt dissection task. Subjects used a telerobotic system to expose an artery in a synthetic model while viewing the operative site with a video laparoscope. Performance was compared between force feedback gains of 75% and 150% and no force feedback. The absence of force feedback increased the average force magnitude applied to the tissue by at least 50%, and increased the peak force magnitude by at least a factor of 2. The number of errors that damage tissue increased by over a factor 3. The rate and precision of dissection were not significantly enhanced with force feedback. We hypothesize that force feedback is helpful in this blunt dissection task because the artery is stiffer than the surrounding tissue. This mechanical contrast serves to constrain the subjects’ hand from commanding inappropriate motions that generate large forces.
Surgical Modeling and Planning
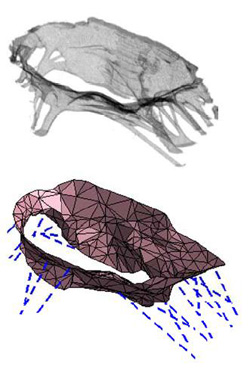
Mitral Valve Modeling:
- Surgical repair of the heart's mitral valve is hard. Repair is typically performed with the heart on bypass (i.e., emptied of blood and no longer beating.) With the heart in this state, it is difficult for the surgeon to predict how to modify the structures of the valve so that the valve will function properly when the heart is sewn up, refilled with blood and allowed to resume beating. A surgical planning system based on patient-specific medical images that allows surgeons to simulate and compare potential repair strategies could greatly improve surgical outcomes. In such a surgical simulator, the mathematical model of mechanics used to close the valve must be able to compute the closed state quickly and to handle the complex boundary conditions imposed by the chords that tether the valve leaflets. We have developed a system for generating a triangulated mesh of the valve surface from volumetric image data of the opened valve. We then rapidly compute the closed position of the mesh using a mass-spring model of dynamics.
Teleoperated Robotics
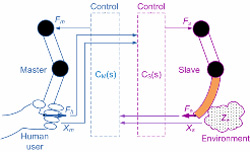
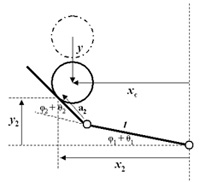
Effect of link and joint flexibility in a teleoperated robot
- A teleoperation system makes it possible for a user to interact with environments that are inaccessible to direct human contact, e.g., because of their constrained space or remoteness. Minimally invasive surgery and space exploration are two examples where telerobotic operation is advantageous. Haptic feedback can improve task performance during both space and surgical teleoperation. Current research on haptic teleoperation assumes ideal dynamics for the slave robot, i.e., a single mass (or a mass and a damper) model for it. Such an assumption is grossly violated in current space and surgical robots due to the presence of flexibility in the links and joints of the robots. Indeed, space robots are designed to be lightweight and compact for minimum liftoff cost and energy consumption during robot control, and therefore involve flexibility. Surgical robots have thin instruments for entering the patient's body through ports for minimal invasiveness. As the surgical instruments become thinner (e.g., < 3 mm in pediatric surgery), the effect of tool flexibility becomes more crippling. Moreover, due to space limitations, actuation of a distal dexterous wrist is performed from outside the patient and propagated to the wrist through flexible cables, which introduce joint flexibility. In this work, we systematically analyze transparency and stability limitations under robot link or joint flexibility and examine the added benefits offered by tip sensors during teleoperation with a flexible slave, and the cost-benefit tradeoffs of reducing or eliminating the effect of flexibility in haptic teleoperation.

World Modeling by Tele-Manipulation
- At present, teleoperation is the only way that robots can perform sophisticated manipulation tasks in unstructured environments. In this control mode, the human operator performs all required sensing and planning, and generates all motion commands based on feedback from the remote environment. In practical teleoperation systems (e.g. undersea operations, tele-surgery, etc ), the sensory feedback is often limited to video images without force feedback, which greatly restricts dexterity and productivity. We have been working to alleviate this situation by using information from the remote robot arm's sensors to assist in teleoperated manipulation tasks . We have derived algorithms that identify essential local geometric properties of objects in the remote environment including geometry, dimensions, and orientations.
Tissue Mechanics
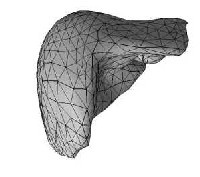
Characterizing the Nonlinear Mechanical Response of Liver to Surgical Manipulation
- Computer-aided medical technologies such as simulators for surgical training and planning require accurate representation of soft tissue behavior under large deformations. Limited datasets, and unrealistic models for soft tissues currently hinder the advancement of surgical simulation. This work presents data and modeling efforts to realize a constitutive model for liver whose parameters have a physical basis. The model can predict the behavior of liver independent of loading modality. Implementing such physically-based constitutive models into simulation systems provide realistic behavior, and ensure that errors made are not from the virtual environment.
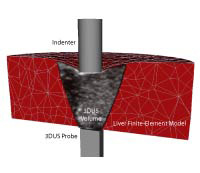
Image-Based Mechanical Characterization of Soft Tissue
- Conventional material testing methods, such as indentation testing, only provide a limited local insight into material response. This project aims to develop parameter identification techniques suitable for material parameter estimation, combining three-dimensional ultrasound imaging with conventional indentation testing methods. Estimates of complete deformation fields obtained through imaging are incorporated into an iterative finite-element modeling (FEM) scheme to identify tissue-specific parameters of a physically-based nonlinear poro-viscoelastic constitutive law.
Robotic Grasping and Shape Deposition Manufacturing
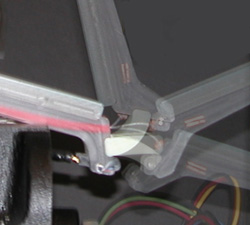
Robust Robotic Mechanisms and Sensors via Shape Deposition Manufacturing
- One of the greatest successes of biologically-inspired design has been the development of mechanically robust robots. One promising biomimetic facbrication technique is Shape Deposition Manufacturing (SDM), which alternates material deposition and machining to produce robot structures with compliant joints and embedded sensing and actuation elements. We explore the benefits of using Shape Deposition Manufacturing for constructing a simple two-fingered gripper and add to the tools available to robot designers by developing a range of sensing modalities compatible with the process. These include Hall-effect sensors for joint angle sensing, embedded strain gauges for 3 axis force measurements, optical reflectance sensors for tactile sensing, and piezoelectric polymers for contact detection. In addition to a simple construction process, the resulting parts are extremely robust, fully functional after high impact loads and other forces due to unintended contact.
Compliant Grasping for Unstructured Environments
- Compliance conveys several advantages for robotic grasping. In unstructured environments, sensing uncertainties are large and target object size and location may be poorly known. Finger compliance allows the gripper to conform to a wide range of objects while minimizing contact forces. Robot joint compliance or stiffness has often been considered in the context of active control, where active control uses sensors and actuators to achieve a desired force-deflection relationship. In contrast, passive compliance, implemented through springs in robot joints, offers additional benefits, particularly in impacts, where control loop delays may lead to poor control of contact forces. The reduced need for the sensing required to create active compliance can also lead to lower implementation costs.

"Soft" Grippers and Bugbots
- Collaborators from Stanford and UC Berkley have designed and produced a robot modeled after the cockroach, utilizing knowledge of the insect's locomotion characteristics and new manufacturing techniques. The interesting feature of the robot is a passive rubber spring joint connecting the legs to the body. This joint, mimicking the springy, resilin lined joints of the insect, aids in disturbance rejection, accomplished without sensory feedback. Our contribution to the project will be a mechanical gripper designed using similar, passive spring joints with variable stiffness, which will aid in the task of grasping an object in a unfamiliar environment, without the use of complex sensory technology.
Tactile Sensing and Display

Remote Palpation Instruments for Minimally Invasive Surgery
- We are developing remote palpation systems to convey tactile information from inside a patient's body to the surgeon's fingertips during minimally invasive procedures. These new instruments will contain tactile sensors that measure pressure distribution on the instruments as tissue is manipulated. The signals from these sensors will be sampled by a dedicated computer system, which will apply appropriate signal processing algorithms. Finally, the tactile information will be conveyed to the surgeon through tactile "display" devices that recreate the remote pressure distribution on the surgeon's fingertips. Creation of remote palpation technology will increase safety and reliability in present minimally invasive procedures, and bring the advantages of minimally invasive techniques to other, more complex procedures, which are not possible today.

A Tactile Shape Display Using RC Servomotors
- Tactile displays are used to convey small-scale force and shape information to the tip of the finger. In this paper, we present a 6x6 tactile shape display that uses commercial RC servomotors to actuate an array of mechanical pins. The display has a maximum pin deflection of 2 mm along with a resolution of 4 bits. Pin spacing is 2 mm with a pin diameter of 1 mm. The display can accurately represent frequencies up to 25 Hz for small amplitudes and is slew rate limited at 38 mm/sec for larger amplitudes.
Tactile Shape Displays
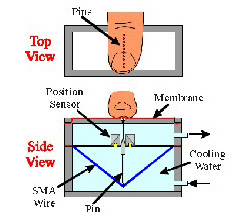
- The tactile display in our prototype system consists of a line of 10 individually actuated pins that are raised against the fingerpad. Shown below is a drawing of our design. A line configuration was chosen since the palpation instrument will be scanned across the tissue allowing motion to provide the other dimension. This also simplifies the design. SMA wires are used to drive the pins. As electric current heats the wire, it goes through a phase transformation and shortens, thus pushing the pin up. With this design, each pin can move 3 mm and produce over 1 N of force. A primary problem with SMA is the slow response times. We overcame this by using water cooling and position feedback for each pin from optical sensors. Figure 5 shows the response of the pin as a function of desired position frequency. The output displacement drops by 30% (-3 db point) at 40 Hz. This satisfies the design specification set by the finger speed experiments.
Vibrotactile Sensing and Display
- We have developed tactile sensors and display for measuring and conveying task-related vibrations in robotic manipulation, teleoperation and virtual environments. Vibration displays can be implemented with inexpensive, open loop devices that can be added to many existing manipulation systems to improve performance. Aside from developing vibration sensing and display devices, we have worked to delineate the kinds of tasks where high frequency vibratory feedback is important. In inspection and exploration tasks the detection of vibrations can be the fundamental goal of the task, while in some manipulation tasks vibrations can enhance performance by reducing reaction times or permitting minimization of forces. We have also developed a vibration sensing and display system for a high-capacity undersea teleoperated robot, and field tested it on an offshore oil platform.
Biological Motor Control

A Quantitative Investigation of the Effects of Hypnosis on Stroke Recovery
- Physical rehabilitation after stroke requires complex interactions between the mind, brain and body. My research focuses on characterizing these interactions through biomechanical analysis of movement during physical therapy, medical imaging of neurological changes in the motor control system and hypnosis as a means of altering the mental state of stroke patients. By combining quantitative methods with a holistic approach to rehabilitation I hope to gain insight into how mind-body interactions affect motor recovery after stroke.

Mechanical Impedance of the Human Hand
- We have worked to determine how humans modulate the mechanical impedance of their hands in response to task requirements. The results help explain sensing and motor control strategies in dextrous manipulation. Our approach involves experimental measurement of force-motion relationships of the hand and fingers during task execution. These studies have measured the impedance of the index finger in extension and abduction, and the impedance of the precision pinch grasp during lifting. We have also examined learning of impedance strategies and applications of these results to fast tasks like drumming.