Navigation : EXPO21XX > AUTOMATION 21XX >
H05: Universities and Research in Robotics
> Middlesex University
Middlesex University

Videos
Loading the player ...
- Offer Profile
- The ASL at Middlesex University specialize in research into Autonomous Robotic Systems. We are actively involved in cutting edge research in the areas of Unmanned Aerial Vehicles (UAVs), Unmanned Ground Vehicles (UGVs) as well as pole climbing systems and are keen to develop productive links with international researchers in complimentary areas.
Product Portfolio
SQ-4 – Unmanned Aerial Vehicle (UAV)

SQ-4 Small Unmanned Aerial System
- This is a novel small unmanned aerial system(sub-400 g)
which fits into a soldiers backpack.
Vehicle Type: VTOL Speed: 5 m/s Length: 300 mm Endurance: 15 min Height: 75 mm Ceiling: 120 m Weight: 400 g (incl. 90 g LiPo Battery) Mission Radius: 1.5 km Payload Weight: 50 g (max) Launch: Hand/VTOL Wing Span: 300 mm Recovery: Hand/VTOL Rotor Diam: 7” Props Payload Sensors: Two micro video cameras MTOW: 400 g Guidance: GPS/Altitude Hold Material: Carbon Fibre/Nylon System: RC Fuel: N/A Power Type: LiPo
Grand Challenge

MoD Grand Challenge 2008
- Grand Challenge was searching for the best ideas in defence technology to help solve some of the evolving threats facing front line troops. It also aimed to provide an opening into the UK defence market for new suppliers and investors. The finale in August 2008, saw the best teams battle in tough conditions at the Army’s Urban Warfare Training Facility. Three weeks at Copehill Down, Europe’s largest Fighting in Built UpAreas (FIBUA) training village, tested the competitors and their equipment to the limits. Competitors were asked to correctly identify targets, detect threats and relay information back to command. With the added challenge of the harsh environmental conditions including the wet weather, competitors were faced with a realistic scenario with snipers and civilians hidden throughout the village as well as improvised explosives which they needed to correctly identify.




New HALO UAV
- Based on the MoD Grand Challenge entry we have spent the last few years developing and protecting the new HALO Co-Axial Tri-Rotor Unmanned Aerial Vehicle for applications in Defence, Security and the Civilian markets. This unique VTOL aircraft has six rotors and can develop a thrust of approximately 60 N. Due to its co-axial configuration and detachable arms, it is very compact and easy to transport, making it an ideal platform for short reconaissance missions and local ISTAR.

Kinetica Art Fair 2011
- The surreal, dream-like, almost ghostly movement of
the piece invokes feelings of surprise and disbelief which proceed initial
disappointment and confusion over what is apparently an inanimate object.
Our concept is designed to provoke fear in the user’s mind about the
possibility of an accident happening to a priceless object of desire.
The work includes an organic table form upon which a priceless antique oriental vase is placed. The user will approach the exhibit and unknowingly interact with it. The table will include proximity sensors which when triggered will cause the vase to react using movement. The direction, speed and destination of the vase will depend on the actions of the people surrounding the table as well as random influences.


Heineken Robot


Heineken Robot
- The Heineken Robot was developed at the Autonomous
Systems Lab in the Department of Product Design and Engineering at Middlesex
University. Originally developed to exhibit at the Kinetica Art Fair London
in February 2010, the Heineken Robot is an autonomous microprocessor
controlled mobile system for serving beer using Heineken’s 5L Draught Keg
system.
The Robot will run on any flat, clear surface of minimum dimensions: 1 m x 0.5 m. An array of Infrared sensors prevent the robot from falling off the table surface and bumping into obstacles. By placing your hand in front of and above the robot, an Ultrasonic sensor is activated, which stops it moving, you then place a half-pint beer glass under the keg tap, the robot then pours out your drink and moves on to its next customer! The robot has sensors which will let the user know when the system is running out of beer and when the batteries need to be recharged. The system has a running time of about 4 hrs between charges. The robot has been designed for ease of access to the batteries and to enable the user to changeover the keg in less than 60 seconds.
PC-101 Surveillance Robot

PC-101 Surveillance Robot
- The Metropolitan Police Service (MPS) Forensics
Department are often called out to crime scenes for evidence capture, which
involves taking pictures of the crime scene and associated areas. These
photographs are only taken from a human height and it would be beneficial if
they could be taken from an elevated perspective, as a greater amount of
evidence could be captured. The MPS contacted Middlesex University as they
have expertise in the field of robotics. A brief was agreed upon between
both MPS and Middlesex to develop a robotic platform which could climb up
existing street furniture and capture images from an elevated perspective.
The collaboration between the two parties had no financial agreements at this point in the development stage as MPS was only giving an insight to what type of equipment was required. The project was self-funded by the Senior Design Engineering student Mehmet Ali Erbil as part of a final year degree project submission.
RHUC Swan Breaks
RHUC Swan Breaks
- During 2007, members of the ASL designed, manufactured
and programmed six life-size robots for a 60 min stage production of ‘Swan
Breaks’ in collaboration with the Hip Hop dance company Robert Hylton Urban
Classicism (RHUC) which premiered at the Laban Theatre, London on 11 October
2007.
A Dance Story of love and betrayal between the natural world, humans and technology, Swan Breaks is an adaptation of ballet classic Swan Lake. Hylton is the modern day Siegfried, bored with the same attention-seeking women he searches for his perfect virtual beauty. Hooked with his lust for Odette, he is dragged into a downward spiral of addictive love, masterminded by Rothbart. Who is she, Odette or Odile, a man made fantasy. Is this computer love gone wrong with the potential for reality in personal relationships present and future?
SI Units (Revision) Cards
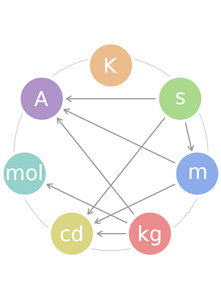
SI Units (Revision) Cards
- The study and use of SI Units is fundamental to all
subjects within the Engineering & Physical Sciences. The International
System of Units has it’s origins in the late 17th century, however, it is
now recognised worldwide as the standard by which all Science and
Engineering are based.
This revision tool, developed by members of the Autonomous Systems Lab at Middlesex University, allows the learner to practice the application, use and combination of 52 of the most frequently used SI Units. A useful pocket-sized reference to all seven SI Base Units, 22 Derived Units and 23 Other Units this product seeks to educate and demystify this complicated and heavily rule-based system. Designed for use by Engineering and Physical Sciences students at all educational levels from School, College to University degree and beyond.
Omni-Directional Robot

Omni-Directional Robot
- The research team within ASL are investigating the design and use of omni-directional wheels for holonomic robot movement. Of particular interest is high velocity and acceleration devices for applications in sporting activites and games.
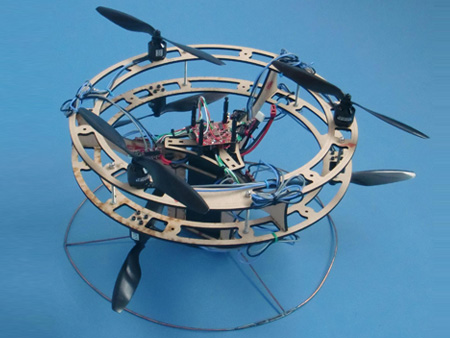
Shrediquette Tricopter - a multirotor MAV by W. Thielicke

- This micro air vehicle is a hobby project. Three MEMS gyroscopes and a two axis MEMS accelerometer are used as sensors. It performs very well in aerobatics ("acro mode"), but it can also hover on its own ("hover mode").