IBG

Videos
Loading the player ...
- Offer Profile
- The Goeke Technology Group is
an innovative development partner for technologies concerning the automation
of production processes in the most various branches of the industry.
With more than 200 employees in Germany and the USA and a success, the Goeke Group designs customer-specific production systems up to their commissioning on-site.
The main focus lies on innovative robotics and automation systems for assembly or inspection tasks.
The applications developed by IBG can be found in nearly every industrial sector: Automotive, Pharmaceutical/Chemical Industry, Food, Aeronautics, Electronics, Energy, Consumer Goods, Furniture, Communications and many other sectors.
Product Portfolio
New
iPROCELL
- world first from IBG

iPROCELL
- Die
IBG / Goeke Technology Group stellt auf dem Gebiet der E-Mobilität ihre
neueste Innovation iProcell vor. Es handelt sich um eine flexible,
vollautomatische Montagezelle für Elektrofahrzeuge.
iProcell revolutioniert den Fahrzeugaufbau und gewährleistet mittels eines neuen Systems die vollständige Prozesskette – vom Entladen aus dem Container bis hin zur fertigen Montage.
Auf dem Messestand werden Fertigungsprozess und E-Fahrzeug in einer eindrucksvollen Live-Präsentation gezeigt.
Solutions
Automotive

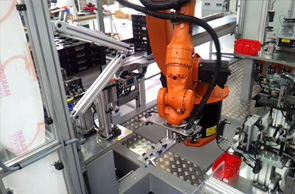
Wheel assembly
- Fully automatic wheel assembly in stepping mode and in
continuously moving production lines (patent pending)
Task:
Fully automatic screwing and assembling of complete wheels to the hub of the wheel on a continuously moving line.
Solution:
The degree of automation in the automotive industry is undoubtedly very high. The presumably simple assembly of the wheels to the vehicles’ body requires a maximum of precision and process security.
For this purpose IBG developed the world’s first fully automatic wheel assembly on a continuously moving line.
The robots’ grippers are equipped with two independent camera systems. They are able to detect the wheel type, the position, the rotational orientation and the working level, by using a 2D camera system and specially developed software from IBG.
After the gripping of the wheel, it is scanned with a 3D camera system to determine the spatial position and rotational orientation of the wheel hub.
With the correct values from the vision system, the synchronous bolting of the wheels takes place while the vehicle moves along the assembly line.
Advantage:
Improvement of ergonomics and increase of quality. Through the automated recording of torque and angle of rotation in each screwing process, a 100% check is carried out which enables the traceability of each assembling process.

Balancing machine
- Automatic balancing of vehicle drive shafts
Task:
Meeting the highest requirements of a "just-in-sequence production" in the automotive plant requires a maximum of plant availability as well as minimum cycle and changeover time of the automated production systems.
Solution:
Each of the four systems can pick up more than 280 different types of vehicle drive shafts (with lengths of 400 mm to 2000 mm) out of an overhead electrical conveyor rail, then automatically balance them and in the end forward them out of the cell. For this purpose, the imbalance of the drive shaft is first identified and precisely measured before a different station of the system customizes the counterbalance which is then automatically welded onto the correct areas of the drive shaft by an industrial robot. The industrial robot and the balancing machine are equipped with extremely compact (servo-powered) gripping systems that allow the processing of different drive shafts in a chaotic sequence within one minute, ensuring the fastest possible automatic changeover to the type of shaft our clients need.
Advantage:
Through flexibility and the use of high-tech components, a reliable automatic solution has been developed which allows diverse products to be fully tested within a very short period of time, guaranteeing our customers high levels of efficiency.

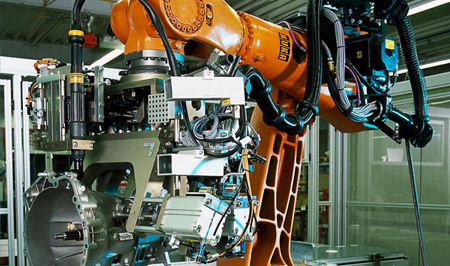
Frontend assembly
- Automatic front end assembly
Task:
Fully automatic screwing and assembly of the front end on a continuously moving line.
Solution:
A 6-axis robot has been equipped with a customized gripper that was specially designed to pick up the front end.
The robot uses this gripper to seize the front end before using the tightening spindles – that have also been attached to the gripper – to screw-fasten the front end to the body. The movements of the robot have been synchronized to match the assembly line conveyor technology.
In order to establish the exact position of the body before it is joined to the front end, the gripper has been equipped with a 3D sensor system that determines the dimensions of the body and forwards the correction values to the robot.
Additionally, sequence checks of the body and the front end are performed before the assembly.
Advantage:
Improved productivity by avoiding production downtimes and by ensuring high availability of the production system.

Circlip assembly
- The world’s first automatic circlip assembly system
(Patent pending)
In many ways, the task of developing an automation system for the assembly of snap rings provides a stiff technological challenge. Due to the different diameters of the snap rings and the continuously changing position of the hole pattern, it has been previously impossible to develop a reliable automatic assembly system. The system designed by IBG now allows the robot-controlled, precise and reliable assembly of snap rings with various geometries. Automatic production systems benefit from this system in a number of different ways:
- Identification of the hole pattern through a camera system
- Intelligent gripping through an adaptive gripper and servo-controlled expansion of the snap rings
- Controlled relaxing and removal of the snap rings with a position monitoring system
- Designed for interior and exterior snap rings

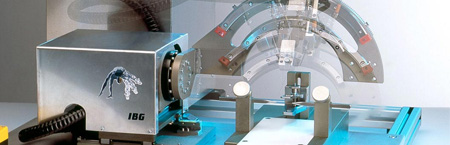
Crankshaft measurement
- Task:
Contactless crankshaft measurement in a single setting using a triangulation laser.
Solution:
Until recently, crankshaft measuring used to be a time consuming process due to the complexity of the measurement features (caused for example by the off centered rotation of the pin bearings with a particularly large amplitude). A further innovation step is the synchronization of the XY axis combination with the rotary motion of the pin bearings which now makes measuring of the main bearings, as well as the pin bearings, in one single setting possible.
Advantage:
The short cycle time of the total measurement now enables our customers to conduct a 100 percent quality control and classification of the crankshaft during the current production. Moreover, the new procedure allows the traceability of the measured values in order to automatically adjust the processing machines. All in all, this leads to cost savings while improving the quality at the same time.

Changing of crossheads
- Task:
Exchange of varnished crossheads against assembly crossheads by means of a turnstile.
Solution:
The crossheads are designed in different ways for the paint shop and the assembly. The automated change of these transport bottom parts is done outside of the actual manufacturing line. The vehicle is removed from the line and equipped with the new crosshead in two steps on a cross-shaped device, rotating around the vertical axis.
Advantage:
Whereas before a mechanical conversion was necessary when implementing a new type of crosshead, the new process is now implemented digitally: vehicle data as well as component data can be modified optionally. Significant saving of space in comparison to conventional systems.

Automatic assembly of electric locking brakes
- Task:
Automatic assembly of electric locking brakes on a transfer system.
Solution:
The individual parts to be assembled are manually positioned on a work-piece carrier. Besides various automatic screwing processes, e.g. a one-component sealing liquid is applied by a robot and checked for 100% completeness. All materials are scanned by a barcode which makes it possible to trace the product consistently.
Advantage:
The data handling enables a superior product quality and its documentation. By means of flexible automatic modules, different products can be run simultaneously in a mixed way in order to be able to manufacture mini-series economically with the quality of mass-production series.
Automatic gear joints
- Task:
The gear is an extremely complicated component that gets affixed to the motor block within the assembly of the aggregate. Only when motor and gear are joined as exactly as possible the optimal functioning of the gear can be guaranteed.
Solution:
All in all six cameras capture the position of the driving plate and the gear shaft in order to join the gear exactly according to the two and three dimensional measurements. Robots link engine and gear with one screw in accordance to the torques’ requirements - a novelty in the automobile industry.
Advantage:
Besides its high degree of automation the system also offers a more humanized and safer work place. The precision of automatic assembly results in a higher quality as well as a longer life span and lower noise levels in the inside of the vehicle.

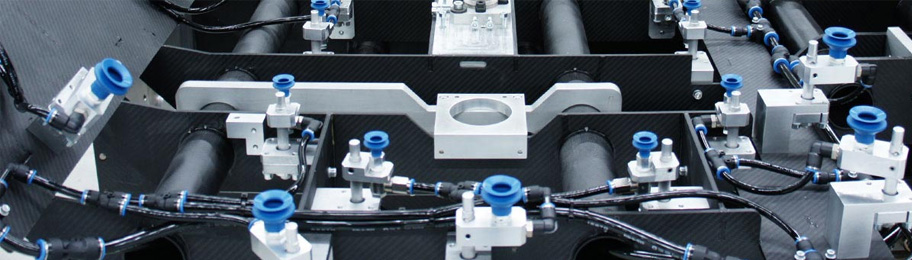
Automatic handling of aluminum plates
- IBG produces a system for handling of aluminum plates
with a size of approx. 4,000 x 2,500 mm. The inserting of unprocessed plates
into a laser cutting machine, the removal of the finished parts as well as
removal and reduction of the skeleton are fully automatic.
The unprocessed plates will be removed from a stack by a specifically developed suction pad and will be placed on the cutting table of the laser. During this process, it will be verified whether two plates have been accidentally taken at the same time.
After cutting, the finished parts will be removed from the laser table and placed on a finished part stack.
At the end of the process, a skeleton gripper removes the skeleton from a stack table and places it on a conveyor belt which will feed the skeleton to a guillotine shear for reduction.
Special grippers have been developed for the removal process and have been adapted to weight and form of the components.
The system is equipped with a traversing carriage on which the raw materials can be transported into the cell. Cut parts will be driven out from the robot cell by a finished part carriage. The change of the traversing carriages may take place while the system is running.

Automatic screw fitting of rail seats
- After reaching the first milestones, the automatic wheel
assembly and the automatic front end assembly on a continuously moving line,
IBG continues to expand its technology leadership in the field of final
vehicle assembly.
With the first automatic screw fitting of seat rails on a continuously moving line for Volkswagen, IBG creates a further technological novelty.
In this development study, a six-axis robot is used which is equipped with a gripper with six screwdriver systems. This gripper keeps the seat rails that have been mounted in the interior of the vehicle in a fixed position so that the seat rails can be bolted to the car body using electrical tightening spindles integrated into the robot gripper. The movement of the robot is synchronized with the conveyor technology of the vehicle.
In order to determine the exact position of the body before the screwing process, an additional sensor system is installed in the gripper which measures the body and transmits the correction data to the robot.
Furthermore, a sequence check of the vehicle is carried out before the assembly in order to establish the location and number of screws of the vehicle.

Automatic panoramic roof installation
- The integration of a panoramic roof / sunroof into the body requires a great amount of time, power and personnel costs. IBG has installed an automated installation and adjustment system which creates the basis for replacing the manual and no longer economically feasible sunroof integration. However, the scope of the entire manufacturing process for the panoramic roof / sunroof integration does not stop here. IBG was also faced with the challenge of developing a fully automatic assembly process for the roof sealing. The solution IBG has come up with consists of a newly developed sealing application head. This system offers the possibility to integrate the manual processes, i.e. " cleaning the adhesive area” and “sealing installation", into a fully automatic production process. With an innovative camera control, the application head is guided along the roof opening of the body during which it cleans the roof flange intended for the seal. Afterwards, the seal is applied all round by the application head. The cycle time for this manufacturing process is significantly reduced compared to manual assembly. With the combination of the sealing application head and the automatic panoramic roof / sunroof assembly, IBG has created a solution for a fully automatic roof integration concept.
Wind power

- Task:
Automation system for the screwing of hub bearings.
Solution:
Robot cell with camera and screwing system.
Advantage:
The time-consuming manual screw-fitting process is significantly shortened due to an intelligent robot control system. By monitoring torque and torque angle, constant screw-fitting values can be achieved. Medical technology / Pharma

Fully automatic investigational product storage system
- As a general contractor, IBG realizes the modernization
of an state of the art investigational product storage system during
operation. Thereby, the four existing fully automatic storage and retrieval
machines, buffer storages and process stations will be modernized and
extended with two more lanes. An absolute process reliability, a fully
automatic and computer controlled insertion and removal of the
investigational products which have a chaotic warehouse management as well
as the complete control of the warehouse management are understood as main
challenges which the new system being developed by IBG will have to meet.
A blister pack, in which the requested investigational product is located, will be removed from a shelf by an automatic storage machine and will be transferred to a work piece carrier transport. The work piece carrier transport supplies the blister to the automatic removal system. Afterwards, the requested product will be removed from a blister pack, scanned, uncapped automatically and weighed in milligrams by a robot. Only then will the product be provided to the lab assistant. Before the product will be placed at an empty space in the warehouse, it will be scanned again, its remaining weight measured and automatically closed with a new cap.
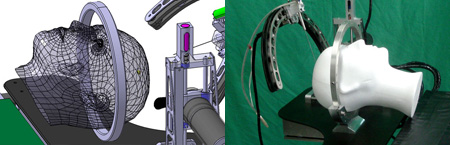
SASSU
- The so-called SASSU (Spherical Assistant for Stereotactic
Surgery) system consists essentially of a five-axis micromanipulator for the
positioning of probes in animal brains, and is particularly suited for tasks
in the electrophysiology sector. These include, for example, the study of
Parkinson's disease as well as a functional mapping of the brain by using
microelectrodes.
For the transaction of the tests, a needle-like probe is attached to the micromanipulator the target position of which is calculated by a specially developed control and planning software. In this software application the animals’ brain is completely mapped and can be shown in any 3-dimensional view. The brain region to be treated is then selected and marked by the user via a graphical interface.
According to these inputs, finally the probe will be introduced automatically into the brain of the animal with a positioning accuracy of 50 microns / 1mrad. To achieve the desired therapeutic effect, the user is now able to induce or block different kinds of brain currents depending on the type of disease and therapy form.
One of the main advantages of the SASSU system compared to manually adjustable devices can be found in the exact reproducibility of the experiments. Because different probes can be adapted quickly and easily, 100% identical tests with e.g. two probes successively or parallel can be conducted on one animal. Conversely, it is also possible to perform completely identical experiments with two different rats.

MAGAS
- MAGAS is the acronym for the German term “motorisch
angetriebenes Gelenkarmassistenzsystem“, a “motor-powered system to assist
articulated arms“, and is an assistant system for neurosurgery applications.
MAGAS has been designed to improve the conditions for surgical operations in this field of medicine. The motor allows automatic readjustments of the surgeon’s line of vision without him having to put down his surgical instruments. This reduces the need of manual work steps and simplifies the overall control of the system, creating an efficient workflow.
MARS
- Motor Assisted Robotic Stereotaxy System – MARS
The MARS system co-developed by IBG is a 6-axis stereotaxic robot frame designed for human use, which is fixed directly onto the surgical table.
The control unit and power supply are placed on a separate surgery trolley. The system is connected via USB interface to a computer from which it is controlled.
Many components are made of X-ray-transparent CFRP.
This also makes the device very stiff and light.
In close collaboration with the University of Lübeck, IBG developed this technology within the framework of a research and development project.
Process Integration

- Individual processes must be linked intelligently to
ensure an efficient internal material flow and to avoid unnecessary
downtimes and storage delays.
By using existing production facilities and integrating new components as well as new technologies such as an 6-axis industrial robot, the key focus is placed on the development of efficient and economical production techniques. Logistic
- Storage and retrieval equipment
Task:
Interlinking individual production steps and storing semi-finished products in a high-rise shelving system.
Solution:
An efficient internal flow of goods requires a stable, reliable and flexible interlinking of all production processes, from assembly right down to commissioning and temporary storage of the products in a high-rise shelving system.
In order to assist their clients in this task, IBG developed and constructed a customized storage and retrieval system for an automatically operating warehouse that involved the storage of injection-molded work pieces in dedicated containers before they are transported to an intermediate storage facility.
The system features a servo-powered shuttle that can move horizontally and vertically, delivering the small storage containers containing the product components to their destinations.
Advantage:
Individual production and logistics solutions from one source. Multimedia

- A high-quality media system with a large
screen isa must-have for modern meeting and conference
rooms.
With regard to cost efficiency and image quality a bigger screen does not provide a more optimal solution. A television with a screen size of 103 inches is within the price range of a luxury car and offers a Full-HD resolution of 1920 x 1080 pixels, which can seem rather blurred. IBG took care of this problem and developed a multimedia system which sets new accents in the electronics industry.
The data is transmitted through a multimedia system including a powerful media server with 3 Full-HD HDMI outputs, which streams the content in Full-HD resolution to each of the individual screens. Another innovation of the system lies in its motor-driven shaft. This allows the user to rotate the screens 90 degrees, in order to obtain 3 Full-HD screens. The servo-motor component can be controlled by an integrated PLC control system which is also available on mobile devices (including iPhone, iPad, Android). Technologies
Green Technology

- As a future oriented and innovative company, IBG pays
special attention to environmental awareness and sustainable business.
Given the fact of a future scarcity of raw material and increasing energy prices, Green Technology gives the possibility to reduce the consumption of energy with the aid of suitable technologies in order to increase the efficiency of the systems and decrease the energy costs.
So it is important to take into account the requirements for saving energy and for increasing the energy efficiency already at an early stage of the process. 
Lithium-ion batteries
- In today’s world of climate change and drastically rising
prices for fossil energies, the demand for energy-efficient and ecologically
sustainable energy sources is increasing constantly.
Lithium-ion batteries provide an emission-free and environmentally friendly solution.
In its capacity as a system provider for leading car manufacturers, IBG developed and built a stacking facility for separator, anode and cathode blades for the production of lithium-ion cells.
The IBG facility implements new ceramic technology for the construction of the cells. Sophisticated gripping systems for ultrathin electrodes and separators (<100µm) in conjunction with camera-controlled robot technology ensures that these innovative energy storage media can be produced at very high levels of quality.
A dedicated sensor system – specifically conceived and developed by IBG for this purpose – continuously monitors key quality parameters, ensuring the consistently high quality of the finished lithium-ion cells.
Because the market for those new high-performance accumulators is still emerging, the number of pieces will keep rising over the next few years, providing a large potential for a reliable automation system.
CFRP
- furthermore excellent damping qualities and exemplary
crash test results. With the same functions, CFRP is a third lighter than
aluminum and has half the weight of steel.
All in all, these facts show that CFRP is an excellent material for modern light weight constructions with the aim to increase the energy efficiency and to save resources to protect the environment.
As a result, IBG, as a partner of leading industrial companies, has been developing different automated production techniques regarding the series production of CFRP components in the automotive industry for several years. The extensive know-how about processes, tools and handling has been transferred to many other branches by IBG.
Due to their extensive experiences IBG offers their support even in very early stages of a project. From development, construction and prototyping to series production of complex CFRPstructures, the clients of IBG receive all engineering services from one source to support this future-oriented technology. 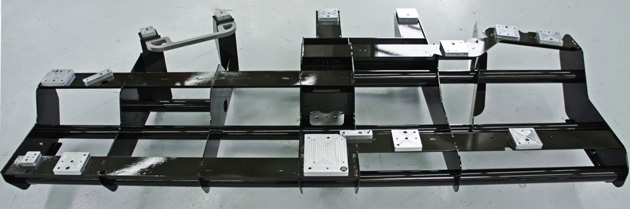
CFRP gripper system
- IBG develops
CFRP-based gripper system
The composite material CFRP (Carbon Fiber Reinforced Plastic) which is made out of carbon fiber and epoxy resin is irreplaceable in sectors like aeronautics, wind energy or motor racing. This is owed to its many positive qualities which are unique in this combination.
CFRP has a comparatively low density but at the same time a high stiffness and solidity and

Ultrasound Cutting Head
- Robot-guided ultrasound cutting head for cutting composite fiber mats for the production of CFRP components used in eletric vehicles.
Grippersystems


Pump gripper
- In order to be able to pick up pumps, this gripper has been equipped with a movable mating piece designed specifically for the pump head. A robot holds the pump and also installs a gasket.

Needle gripper
- IBG has developed a new needle gripper which is suited
perfectly for the handling of flexible fiber composite material due to its
compact and simple design.
Based on standard components, the needle gripper guarantees a high availability with low wear.

Loading and unloading of a CNC lathe
- Components of different shapes and dimensions can be
taken from a chaotically loaded container. For this task, the robot has been
equipped with a special vacuum suction system.
The robot moves the component to a camera which recognizes the rotational orientation of the stamp located on the front side of the head end.

Cell interlinking
- The task was to design an automated work piece feeding system utilizing a robot. The gripper at the robot has been specifically designed to grasp the parts. After the process, the robot changes the tool and uses a deburring tool for further processing of the parts.

Profile gripper
- In this project, IBG has realized a system, which makes use of a camera to handle various profiles. In addition to the gripper function, the gripper is also equipped with a vacuum gripper in order to separate the profiles.

Motor gripper
- This gripper is used for lifting a motor from the material supply system and for then transferring it to another workpiece carrier. The robot communicates with the automated transport vehicle (not developed by IBG) on which the carrier is located in order to ensure the optimum position for the gripper.

Rim gripper
- The gripper is suitable for a wheel diameter of 13“-22“ and a rim load of max. 30 kg. It is also equipped with a collision protection to prevent damages on the components. The rims will be supplied to a milling machine by the robot which will remove them after completion of the process.

Vacuum gripper
- The gripper is used to lift parts from a mold which have become hot due to pressing and to allow them to cool down on the way to the next process step. The manipulator is equipped with vacuum pads and guides which will keep the part in the right position.

Plate gripper
- This gripper is a specifically designed suction gripper which takes blank plates from a stack and places them on a laser cutting table. The plates that have to be processed are coated and can stick together. Therefore, the blank plates are lifted off from the material supply system in a motion similar to that of peeling fruit or vegetable. During this process, a check will be carried out to verify that only one plate has been taken.

Dual grip-head
- A robot, which is equipped with a dual grip-head, takes one motor with each gripper from a box. The position of the motor is recognized by a camera attached to the grip-head which allows for the precise adjustment of the pickup position. The robot moves with the motor in the gripper to the next station, where four bumpers are hold in position and attached to the motor.

Shaft gripper
- Equipped with a combined grip and welding unit, this
robot is able to feed shafts to a tray, from which a worker removes them.
In the system, drive shafts for cars are measured to determine their initial and residual imbalance. Afterwards, the balancing weights are welded on by the welding unit.

Cylinder head gripper
- The cylinder heads to be moved are mounted on
standardized adapter plates with defined gripping points. The gripper is
used to realize the automatic handling of the components.
The components in this example are removed from the feeder and set onto the tray of a turntable (180 ° rotation). In this position, the components are then fed to an automatic tunnel wash.

Sealing application head
- In a first step, the sealing application head is used to clean the area onto which the adhesive will be applied at a later stage. Next, the sealing is applied with the sealing feeder being located alongside the robot arm. The application head automatically finds the correct position in the roof opening.

Glass roof fitting
- With the help of a manually guided handling system, the panoramic roofs are removed from the containers and are then set down at a transfer station for further processing with the fitting device. A worker then uses the fitting device to take the cassette and move it, supported by an electric motor, along a rail system to the car body. Subsequently, the roof is aligned and bolted to the car body.

Automatic screw fitting of rail seats
- A six-axis robot is used which is equipped with a gripper with six screwdriver systems. This gripper keeps the seat rails that have been mounted in the interior of the vehicle in a fixed position so that the seat rails can be bolted to the car body using electrical tightening spindles integrated into the robot gripper. The movement of the robot is synchronized with the conveyor technology of the vehicle.

Wheel assembly
- The robots’ grippers are equipped with two independent camera systems. They are able to detect the wheel type, the position, the rotational orientation and the working level, by using a 2D camera system and specially developed software from IBG. After the gripping of the wheel, it is scanned with a 3D camera system to determine the spatial position and rotational orientation of the wheel hub.

Front end assembly
- The manual front end assembly is replaced by a fully automatic method. A gripper inserts the components by using a holding fixture. The gripper is also equipped with a screwdriver. In order to establish the exact position of the body before it is joined to the front end, the gripper has been equipped with a sensor system that determines the position of the bulkhead plates at the axles and forwards the correction values to the robot.

Gluing, riveting and welding
- A rotary indexing table is the basis of this system with which several joining processes are carried out. The first step, gluing, consists of the application of adhesive beads onto the components for which a movable glue applicator is used which is attached to a robot. A laser scanner then checks whether the beads have been applied properly. This ensures a consistently high quality of the gluing.

Riveting station
- Equipped with adaptive C frame riveting pliers, this robot is used for the riveting of two flat parts of any type of material at pre-defined positions. Efficiency, precision and support for a large number of variations are the decisive advantages of this fully automatic riveting station over the previously employed manual riveting process.

SafeGrip
- The gripper has been equipped with additional sensors for various functions. This makes it possible to almost simultaneously check whether the gripper has correctly taken a vial, whether the storage location in the blister is occupied and whether the barcode on the vial has been scanned.
Robot Technology
- One of the core competencies of IBG is the use of robots from all leading producers and the development of complex, individual user software and the installation with own personal.

Gripping systems
- The gripper is the interface to the workpiece and
therefore a key element for the entire process.
We develop joining and gripping strategies for a wide range of tasks, ensuring high levels of process capability for different material properties.
New materials such as carbon-fibre reinforced plastics (CFRP) are fast gaining ground, enabling companies to reach an energy-efficient and environmentally friendly, but at the same time economic production.

Robot guidance system
- Through especially developed 2D / 3D – camera technology IBG is able to measure a vehicle by vision technology which is fixed to the robot. Afterwards, the target position of the robot will be corrected automatically.

Software
- The complexity of the tasks to be solved again and again
requires the interaction of several intelligent systems.
Based on our long-standing experience in the fields of PC, robot and PLC programming we are able to cover all areas of software development.
We use state-of-the-art technologies in which our specialists get constantly further educated.
The creation of complex visualizations for assembly and production systems is also one of our strengths.

Building of switch cabinets
- Building switch cabinets inhouse allow us to ensure the
high quality standards we impose on ourselves in all the manufacturing areas
of an automation project.
Here we fulfill all valid international standards and guidelines and also implement them with our customer-specific release.
Before any delivery, all modes of operation are tested inhouse for perfect function in order to guarantee a smooth installation.
We make the preparation of state-of-the-art circuit diagrams and layout plans possible by using CAD systems such as WSCAD and EPlan.
Image processing

- As problems become more and more complex, more
innovative measuring systems are required and digital image processing
becomes ever more significant.
Application areas of image processing include:- 3D measuring technology
The contactless capturing and/or measuring of spatial geometries with optical methods - Quality assurance
Control of the exact adherence of geometric dimensions in the production process as well as checks for completeness of the assembly process.
- 3D measuring technology

Bin Picking
- Due to the high complexity between object detection and
grip point detection, IBG developed a safe and economical automation system
which feeds automatically to and takes back the screw blanks out of a CNC
machine. The blanks are made available without a uniform orientation in
steel containers and detected by an industrial vision system and are then
picked by a robot.
IBG provides all-in-one solutions from a single source for different geometries and for different types of material provisioning and ensures a high availability through the combination of intelligent imaging and suitable gripping technology.
Aviation
- IBG developed and manufactured for its client B/E
Aerospace an assembly line for the automatic production of oxygen generators
used in the industrial sector of aeronautics.
The assembly consists of two independently operating robot cells. In the first cell, subassemblies of the oxygen generators are preassembled with numerous variants in five independent assembly processes. The aim is to produce 500 complete systems in 1.5 shifts. An industrial robot is responsible for the complete work piece transport within the cell. The provision of components and semi-finished products is carried out by conveyor belts and trays and has been designed for a slack time of 500 pieces.
In the second cell, the oxygen generators are labeled by means of laser technology. For this purpose, the seam must be detected automatically at the periphery of the generators, so that the label does not extend beyond the seam. Afterwards, the removal of dust, an O-ring assembly as well as placing and securing various variants take place. After a weight check, the finished component will be stored in a customer provided trolley by an industrial robot. Assembly

Pressfit systems
- Pressfit systems and screw assembly systems allow the
joining of components and the reliable implementation of screw connections
even in confined spaces.
For this purpose, IBG uses pneumatic, hydraulic and PC-controlled servo-powered systems. These systems can also be equipped with redundant features, enabling them to monitor themselves.

Gluing and bonding
- Flexible gluing and bonding systems make the production
and assembly of the most various components possible.
Rail-controlled robots apply adhesive and sealing beads on the components and connect them afterwards.
During the application of the sealing bead the completeness of the bead is verified simultaneously with laser technology in order to guarantee the quality of the final product.

Transfer
- We develop multi-purpose transfer and feeding solutions
in standard design or in accordance with the task presented to us.
As in all our specified areas, our product range is always developed further with the aspect of innovation in mind.