Navigation : EXPO21XX > ROBOTICS 21XX >
H21: Humanoid and Androids Research
> University of Washington
University of Washington

Videos
Loading the player ...
- Offer Profile
- Our mission is to develop
science, technology, and human resources at the interface between robotics
and biological movement systems.
Our goal is to produce useful, innovative research and technology as well as trained researchers fluent in both technological and biological systems.
Product Portfolio
Surgical Technology
- Surgical Technology is the application of advanced
technology to minimally invasive surgery (MIS) training and procedures. The
research is focused on following trusts: surgical robotics, objective
assessment of surgical performance, simulation, and the biomechanics of soft
tissue that are related MIS procedures.
The research is conducted as part of a long term collaboration between the Biorobtics Lab and the Center of Video Endoscopic Surgery (CVES) at the University of Washington co-chaired by Mika Sinanan MD., Ph.D. 
Raven: A Surgical Robot System for Open and Minimally Invasive Surgery
- The Raven Surgical Robot is a 7-DOF cable-actuated
surgical manipulator designed for use in either MIS or open surgery. The
surgical robotic system is teleoperated using a single bi-directional UDP
socket via a remote master device. The Raven was designed using a spherical
mechanism to ensure a stationary port location for MIS, and force/torque
data collected by the BlueDRAGON system allowed us to optimize the design
based on surgical need. Our use of a low-cost, portable control station
(which consists of two Phantom Omnis, a USB foot pedal, a computer for data
transmission, and a computer for Skype/iChat) easily allows us to perform
teleoperation experiments around the globe.
The Raven has been used in two significant field experiments (HAPs/MRT and NEEMO XII), one animal experiment, and several teleoperation experiments (including PlugFest 2009).
Global Simulation Training in Healthcare
- The Biorobotics Lab has partnered with clinicians in the
School of Medicine and experts in the Department of Global Health to create
systems to train medical skills in the developing world. Our first project
is a low-cost simulator of the cricothyrotomy procedure. It leverages our
experience in measuring technical surgical skills and collecting clinician
performacne data. We are validating our current simulator and developing
simulators for new procedures.
Controls and System Identification
- An ongoing research project at the UW BioRobotics
laboratory is to investigate the automation of soft tissue compression for
robot-assisted surgery. The difficulty involves interacting with a variety
of tissues with unknown properties without the use of contact and position
sensors on the robot due to sterilization and size constraints. A solution
is to use an Adaptive Model Predictive Control approach to estimate the
tissue interaction force, allowing high level commands for execution of
predefined tool trajectories for compression of soft tissue. The controller
would take the dynamics of the manipulator (the surgical robot) and soft
tissue into account to achieve acceptable performance when in contact with
various tissues.
Previous Projects
- Surgical Technology is the application of advanced
technology to minimally invasive surgery (MIS) training and procedures. The
research is focused on following trusts: surgical robotics, objective
assessment of surgical performance, simulation, and the biomechanics of soft
tissue that are related MIS procedures.
The research is conducted as part of a long term collaboration between the Biorobtics Lab and the Center of Video Endoscopic Surgery (CVES) at the University of Washington co-chaired by Mika Sinanan MD., Ph.D. 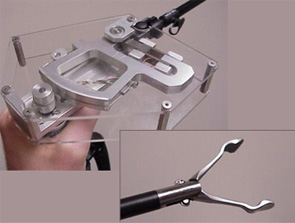
Motorized Endoscopic Grasper (MEG)
- The MEG is a 1 degree-of-freedom device incorporates
force and position sensors and actuated by a DC motor for measuring
Biomechanical characteristics of soft tissues in-vivo and in- vitro
Accurate biomechanical characteristics of tissues is essential for developing realistic virtual reality surgical simulators using haptic devices. Surgical simulation technology has progressed rapidly but without a large database of soft tissue mechanical properties with which to incorporate. In addition, the majority of the research that has been done on measuring mechanical properties of abdominal soft tissues was performed in vitro, on animals and cadavers. As simulation technologies continue to be capable of modeling more complex behavior, a tissue property database needs to be developed to fill this gap. This problem has been addressed in recent work with a variety of tools and techniques.[1-4]
Methods & Tools

RedDRAGON
- The RedDRAGON is a system for measuring the kinematics
and the dynamics of two endoscopic tools along with the visual view of the
surgical scene during the course of a surgical procedure. The system can be
used in three different modalities: animal model, physical model simulator,
virtual reality simulator.
The Red Dragon is a system that tracks the motion of two minimally invasive tools along with all the force and toques applied on the tools by the surgeon as he or she interacts with the simulated or animal models. The Red Dragon unique mechanism allows crossing the various training modalities while providing a standard interface. It follows the trainee as he or she progresses from a simulation environment to the reality (animal model) while providing quantitative information for objectively assessing the trainee’s technical skills. The Red Dragon unique spherical mechanism with its remote center of rotation enables its unique capability to cross the versions domains of MIS training.
Haptic Interfaces
- Haptic devices provide force feedback to humans interacting with virtual or remote environments. Such devices convey a kinesthetic sense of presence to the operator. The key characteristic that distinguishes a haptic interface from passive devices is a bi-directional flow of information.
Projects
- Haptic devices provide force feedback to humans interacting with virtual or remote environments. Such devices convey a kinesthetic sense of presence to the operator. The key characteristic that distinguishes a haptic interface from passive devices is a bi-directional flow of information.
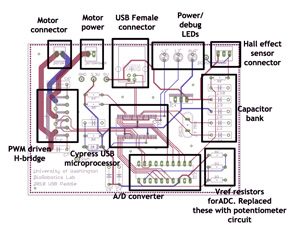
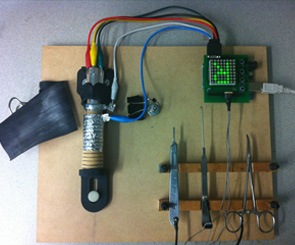
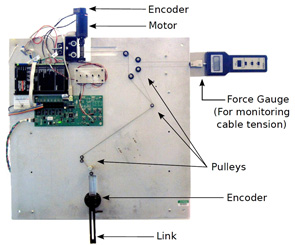
USB interface to the Haptic Paddle
- The Haptic Paddle is a low cost educational haptic device
developed in the late 1990s at Stanford University by Mark Cutkosky, Jesse
Dorogusker, Christopher Richard, and Allison Okamura as a simple
force-feedback display which was both inexpensive and durable. It was later
improved upon by Johns Hopkins University, and has finally made its way to
the University of Washington. The goal of our work here at the UW was to
transform the electronics from an old analog design using the "legacy"
printer port, to a more mordern digital design, centered around a
microprocessor with USB capability. We believe this modernized haptic paddle
can be an invaluable tool for instruction in robotics, haptics, control
systems, and embedded design courses.
Haptics Data Archive
- The purpose of this archive is to share datasets related
to human and machine touch and manipulation. The goal is to encourage
researchers to mine datasets for new results. To find out about uploading a
data set, click "Upload Data" in the menu bar above. The archive is hosted
by the Biorobotics Lab at the The University of Washington.
Devices
- Haptic devices provide force feedback to humans interacting with virtual or remote environments. Such devices convey a kinesthetic sense of presence to the operator. The key characteristic that distinguishes a haptic interface from passive devices is a bi-directional flow of information.
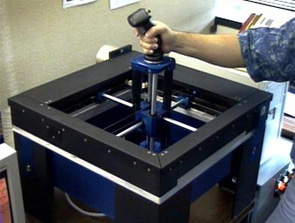
Linear Haptic Display (LHD)
- A 3 degree-of-freedom haptic device, built for maximum workspace, force output, and structural stiffness. It features a patented steel cable transmission system which enables high forces and high rigidity in the three orthogonal axis of translation motion.

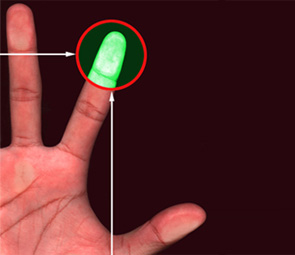
Fingertip Haptic Display (FHD)
- A 2 degree-of-freedom haptic device whose mechanical design is optimized for the workspace of the human finger. This device is being used to study human perception of curved surfaces and surface discontinuities.

Pen Based Force Display (PBFD)
- A direct-drive, parallel, actuation redundant, three degree-of-freedom haptic device designed to provide force feedback information generated by either a master-slave system or a virtual simulation. The operator interacts with it using either the fingertip or a freely held pen-like tool.