Virginia Tech

Videos
Loading the player ...
- Offer Profile
- "Robot Evolution by
Intelligent Design"
The Robotics & Mechanisms Laboratory at Virginia Tech is a facility for graduate and undergraduate robotics research and education with an emphasis on studying novel mobile robot locomotion strategies.
Our research interests are in the area of Robot Locomotion and Manipulation, Kinematics and Mechanisms, and Autonomous Systems.
Product Portfolio
Robots

SAFFiR: Shipboard Autonomous Fire-Fighting Robot
- SAFFiR is a bio-inspired bipedal robot designed for finding and extinguishing fires aboard naval ships. SAFFiR is powered by custom linear serial elastic actuators that incorporate custom titanium springs. It will utilize an advanced sensor suite to navigate the difficult environment caused by smoke, heat, and water vapor. SAFFiR is designed to use many available fire suppression methods including hoses, fire extinguishers, and PEAT canisters. It will be protected by high-temperature thermal shielding, and is designed to traverse a ship environment including difficulties such as stepping over sills and walking in sea state conditions. This project is sponsored by the Office of Naval Research (ONR)

CHARLI: Cognitive Humanoid Autonomous Robot with Learning Intelligence
- CHARLI is the United States' first full-size autonomous humanoid robot. It's mechanical design has allowed experimentation into the effects of different mechanical configurations, mostly in the legs, on the performance of bipedal walking and balancing. CHARLI is capable of walking in all directions as well as turning, kicking, and performing gestures and simple upper body manipulation tasks. A variety of hands and grippers have been experimented with for various objects or goals.

DARwIn: Dynamic Anthropomorphic Robot with Intelligence
- DARwIn (Dynamic Anthropomorphic Robot with Intelligence) is a family of fully autonomous humanoid robots capable of bipedal walking and performing human like motions. Developed at the Robotics & Mechanisms Laboratory (RoMeLa) at Virginia Tech, DARwIn is a research platform for studying robot locomotion and autonomous behaviors, and also the base platform for Virginia Tech’s entry to the RoboCup competition.

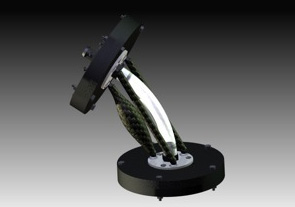
HyDRAS: Hyper-redundant Discrete Robotic Articulated Serpentine
- Unique snake-like robot that utilizes a new way of locomotion to climb pole or scaffolding structures.

STriDER: Self-excited Tripedal Dynamic Experimental Robot
- STriDER (Self-excited Tripedal Dynamic Experimental Robot) is a novel three-legged walking machine that exploits the concept of actuated passive dynamic locomotion to dynamically walk with high energy efficiency and minimal control. Unlike other passive dynamic walking machines, this unique tripedal locomotion robot is inherently stable with its tripod stance, can change directions, and is relatively easy to implement, making it practical to be used for real life applications.

MiniHUBO: Miniature Humanoid Robot
- MiniHUBO (Miniature Humanoid Robot) is an small affordable adaptable robot platform. MiniHUBO is a miniaturized version of the HUBO developed by the Korea Advanced Institute of Science and Technology (KAIST). The goal of MiniHUBO is to develop an affordable and open-ended research platform to expand knowledge in the human robotics field. MiniHUBO is designed to be simple to fabricate and assemble. MiniHUBO is Designed with a flexible control unit capable of easily integrating sensors to increase capability.

RAPHaEL: Robotic Air Powered Hand with Elastic Ligaments
- RAPHaEL (Robotic Air Powered Hand with Elastic Ligaments) is a dexterous robotic hand powered by compressed air with a novel actuator in the shape of an accordion like corrugated tubing. Each finger of the hand is actuated by three actuator segments connected to a single compressed air line. All three segments of the finger moves as compressed air enters the actuator triggered by a solenoid, and the finger returns to its original position by elastic members attached to the finger when the air is cut off. The force, position, and compliance of the finger is controlled by a electronic air pressure regulator through feedback from the bending position sensors and force sensors at the tip of each fingers. This mechanism significantly simplifies the design, control, and implementation of a dexterous hand and dramatically lowers the cost enabling it to be a cost effective practical solution for use in prosthesis.

DARwIn OP: Open Platform Humanoid Robot for Research and Education
- DARwIn-OP: An Open Platform, Miniature Humanoid Robot Platform for Research, Education and Outreach. The objective of this annual workshop is to; introduce DARwIn-OP to the humanoid robotics community to broaden the DARwIn-OP project and form a user community; train the users for use in research, education, and outreach activities; disseminate results of the usage of DARwIn-OP in the classroom; and to obtain feedback from the users for future improvements.
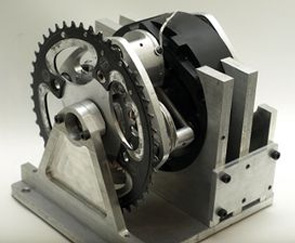
CIVT: Cam-based Infinitely Variable Transmission
- The Cam-based Function Generating Transmission is a novel mechanism that takes two inputs, an angular rotational input and a ‘gear ratio’ selection, and outputs an angular rotation with a variable speed ratio. This transmission has unique characteristics such as generating specific functional speed ratio outputs including dwells, for a constant velocity input.

IMPASS: Intelligent Mobility Platform with Active Spoke System
- IMPASS (Intelligent Mobility Platform with Active Spoke System) is a wheel-leg hybrid locomotion robot with high mobility for unstructured terrain. Utilizing rimless wheels with individually actuated spokes, it can follow the contour of uneven surfaces like tracks and step over large obstacles like legged vehicles while retaining the simplicity of wheels. Since it lacks the complexity of legs and has a large effective (wheel) diameter, this highly adaptive system can move over extreme terrain with ease while maintaining respectable travel speeds, and thus has great potential for search-and-rescue missions, scientific exploration, and anti-terror response applications.
WSL: Whole Skin Locomotion
- The Whole Skin Locomotion is a novel locomotion mechanism for mobile robots inspired by the motility mechanisms of single celled organisms that use cytoplasmic streaming to generate pseudopods for locomotion. The embodiment of WSL works by way of an elongated toroid which turns itself inside out in a single continuous motion, effectively generating the overall motion of the cytoplasmic streaming ectoplasmic tube in amoebae.

MARS: Multi Appendage Robotic System
- MARS (Multi-Appendage Robotic System) is a hexapedal robotic platform capable of omni-directional walking and of performing manipulation tasks. Patterned after the LEMUR IIb (Legged Excursion Mechanical Utility Rover), the latest in a series of hexapedal robots developed at NASA JPL, it is developed for autonomous inspection and maintenance tasks on the exterior of space structures and vehicles in zero gravity environments. MARS is also a general research platform to study mobility over difficult environments such as costal terrain and uneven surfaces.
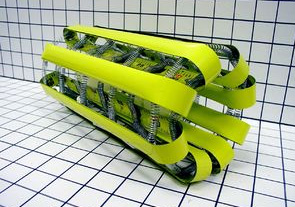
CIRCA: Climbing Inspection Robot with Compressed Air
- CIRCA (Climbing Inspection Robot with Compressed Air) is a unique climbing robot that utilizes McKibben air muscles to climb scaffolding structures for inspection tasks. By connecting multiple CIRCA modules together in different configurations, different methods of locomotion can be achieved. For example, a 'doughnut' configuration would be useful for climbing a pole, and a helical configuration would be useful for ground locomotion.

DAVID: Demonstrative Automobile for the Visually Impaired Driver
- DAVID (Demonstrative Automobile for the Visually Impaired Driver) is the world's very first, and only vehicle than can be driven by the blind, developed in response to an initiative proposed by the National Federation of the Blind (Blind Driver Challenge). Through the development and integration of novel non-visual driver interfaces on an existing vehicle platform, the goal is to provide the blind with a degree of independence that they have never before experienced.
Research

DARwIn's Brain-A.I. for a Soccer Playing Humanoid Robot
- The goal of this project is to provide embodied
Artificial Intelligence to a multi-agent team of humanoid robot DARwIns such
that they can compete in the International RoboCup competition. RoboCup is a
landmark project in the robotics and A.I. communities, presenting a standard
problem of developing a team of fully autonomous humanoid robot soccer
players that can beat the human world soccer champions by the year 2050.
This project is focused on building a robotic control architecture capable
of performing vision processing, real-time sensor fusion, high-level
behavioral management, cooperative teamwork, and bi-pedal gait generation
for dynamically stable walking.
Researcher: Jesse Hurdus
DARwIn: Stabilized Omni-directional Walking Engine for Miniature Humanoid Robots
- The goal in this research is to implement omnidirectional
and stabilized locomotion. Omnidirectional locomotion is the ability to move
in any direction regardless of the orientation of the robot. This is a huge
advantage in dynamic environments and restricted spaces such as robot
soccer. We will use the body to track the on-line ZMP reference to stabilize
walking. All the high-level programming will be written in MATLAB and the
lower-level interface to the hardware will be implemented by C++. Webots
will be used for simulation purposes in this research.
Researcher: Seungmoon Song

PIRE: Humanoids-University Accessible Infrastructures to Advance Capabilities
- In partnership with researchers from Drexel, UPenn,
Swarthmore, Bryn Mawr College, and international partner Korea Advanced
Institute of Science and Technology (KAIST) this project will bring leading
roboticists from the US and Korea together to advance state-of-the-art
humanoid robotics. The project will result in infrastructures that will
produce far-reaching broader impacts and will enable humanoids to work and
socially interact with people. Virtual-Hubo, Mini-Hubo, and a remotely
operable Hubo test rig are being developed. The budget for this five-year
project is $2.5M.
Researchers: Jeakweon Han, Karl Muecke

DARwIn: An Analytical Motion Filter for Humanoid Robots
- The Analytical Motion Filter (AMF) takes reference motion
of humanoid, and stabilizes an otherwise unstable motion while preserving as
much of the reference motion as possible. The analytical solutions will
provide insight to the stability of the robotic system that would otherwise
be difficult to identify in a numeric optimization scheme. The specific
objectives are to: stabilize reference motions while retaining as many of
the characteristics as possible; verify the filter using human motion
capture data, kinematically synthesized data, and motion data from animation
software in both simulation and on a humanoid robot platform; and provide
insight into the stability of the humanoid robotic system.
Researcher: Karl Muecke

DARwIn: Precision Circular Walking of Biped Robots
- Whenever bipedal robots need to make turns, the ability
to walk stably and precisely along an abitrary radius curve will be quite
beneficial. This motivates us to derive new ZMP constraint equations with
respect to a rotating coordinate frame, seek appropriate dynamic gaits based
on them, and address the forward and inverse kinematics. A set of dynamic
walking patterns including the transient are are herein proposed and applied
to an exemplicative case of turning locomotion. Dynamic simulations prove
the patterns to be successful even in the presence of distributed-mass and
ground contact effects, and experiments using the DARwIn humanoid robot
platform will be conducted.
Researchers: Dr. Seungchul Lim, Karl Muecke

Development of an Autonomous Vehicle for the DARPA Urban Challenge
- 'Odin' is Team VictorTango's entry in the 2007 DARPA
Urban Challenge, an autonomous ground vehicle competition in an urban
environment. The team includes 46 undergraduate students, 8 graduate
students, 4 faculty members,5 full time TORC employees and industry
partners, including Ford Motor Co. and Caterpillar, Inc. Team VictorTango
successfully completed the DARPA Urban Challenge final event, finishing 3rd
with a cash prize of $500,000. During the competition, Odin was able to
drive several hours without human intervention, negotiating stop sign
intersections, merging into and across traffic, parking, and maintaining
road speeds.
Researchers: Jesse Hurdus, Shawn Kimmel, Team VictorTango

CAREER: Whole Skin Locomotion: Structural Design and Actuator Development
- The goal of this research project is to develop a model
to which we can apply actuator forces and predict the resulting shape and
motion of the unique Whole Skin Locomotion (WSL) robot. The objectives are
to: gain an understanding of finite element models used for membrane
surfaces and implement a suitable model with an appropriate loading
strategy; find the final geometric shape of the robot and predict its motion
given an environment and actuator loads; develop an analytical solution and
compare it to the FEA results to gain insight into the fundamental
mechanisms that propel this robot.
Researcher: Derek Lahr

CAREER: Whole Skin Locomotion: Development of an Incrementally Loaded FE Model
- The goal of this research project is to develop a model
to which we can apply actuator forces and predict the resulting shape and
motion of the unique Whole Skin Locomotion (WSL) robot. The objectives are
to: gain an understanding of finite element models used for membrane
surfaces and implement a suitable model with an appropriate loading
strategy; find the final geometric shape of the robot and predict its motion
given an environment and actuator loads; develop an analytical solution and
compare it to the FEA results to gain insight into the fundamental
mechanisms that propel this robot.
Researcher: Derek Lahr

IMPASS: 3D Kinematic Analysis Based on Screw Theory
- IMPASS is a wheel-leg hybrid robot that can walk in
unstructured environments by independently extending, or retracting, three
actuated spokes of each wheel. The current research objectives for this
project are: classification for topology structures of IMPASS based on
different ground contact points; mobility analysis for different
configuration cases, using both conventional and screw-based modified
Grübler and Kutzbach criterion; inverse and forward position analysis for
the critical topology scheme of IMPASS; singularity configuration identify
and investigation using screw theory; and screw-based Jacobian analysis.
Researchers: Ya Wang, Ping Ren
IMPASS: Reactive and Deliberative Motion Control for Rough Terrain Locomotion
- This project researches motion planning strategies for
the novel actuated spoke wheel robot, IMPASS. The specific objectives are
to: develop 2-D and 3-D motion planning strategies in unstructured terrain
for both terrain sensing and non-terrain sensing configurations; verify
motion planning strategies in simulation and experimentally; advance the
capabilities of the hardware platform, including a moving center of gravity,
onboard computer and power, and rugged body and components; develop accurate
and dependable perception units for terrain sensing and object recognition,
including laser range finders and cameras.
Researchers: Shawn Kimmel, Blake Jeans
STriDER: Gait Planning and Standing Up Strategies
- This research investigates standing up strategies for the
novel three-legged robot STriDER. The unique structure and operation of
STriDER makes the simple task of standing up challenging: the relative
height and long limbs of the robot require high torque from the actuators
due to large moment arms; the joint configuration and length of the limbs
limit the workspace where the feet can be placed; the compact design of the
joints allows for limited actuator torque; the number of limbs does not
allow extra support and stability in the process of standing up. Five
strategies have been studied: a three feet pushup, two feet pushup, one foot
pushup, spiral pushup and feet slipping pushup.
Researcher: Ivette Morazzani

STriDER: Kinematic Analysis of its Parallel Configuration
- STriDER (Self-excited Tripedal Dynamic Experimental
Robot) is a unique walking robot with three legs. When not walking, STriDER
can be modeled as a three-branch in-parallel manipulator given the
assumption that all three foot contact points are fixed on the ground with
no slipping. The conclusions derived from the kinematic analysis will be
utilized in dynamic analysis and motion planning. The specific research
objectives are: solve the inverse and forward displacement problems,
establish the Jacobian matrices, identify the singularity and propose the
elimination method based on redundant actuation.
Researcher: Ping Ren

CLIMBeR: Cable-suspended Limbed Intelligent Matching Behavior Robot
- CLIMBeR (Cable-suspended Limbed Intelligent Matching
Behavior Robot) is a robot being developed for climbing unstructured cliffs.
Utilizing a multi-contact force distribution algorithm and by adjusting its
posture for stability. CLIMBeR uses matching behavior (swapping foot to
foot, hand to foot, or hand to hand on a single hold or point) to plan each
foot placement. CLIMBeR has three 3DOF limbs, a winch with a cable and will
soon have a miniature laser range-finder to sense the terrain geometry for
planning. This project is sponsored by NSF as a REU project.
Researcher: Brad Pullins

Hardware-Accelerated Nonlinear Predictive Control for Legged Locomotion
- We plan to realize adaptive and resilient locomotion in
legged robots by implementing a novel hybrid hard-accelerated nonlinear
predictive control architecture inspired by biological nervous systems. This
effort will be a first step in a larger collaborative research effort in
studying the hierarchical relationship found in the nervous system of
animals for locomotion control; in particular, to understand how
higher-level centers' predictive capabilities can modulate lower-level
centers' gait generation, and to translate this knowledge to engineering
design principles for adaptive and resilient gait generation. The 1.3 tall
humanoid robot CHARLI will be used to test the control system.
Researcher: Joe Hays

CIRCA: Climbing Inspection Robot with Compressed Air
- CIRCA (Climbing Inspection Robot with Compressed Air) is
a unique climbing robot that utilizes McKibben air muscles to climb
scaffolding structures for inspection tasks. The prototype design won First
Place in the CAGI (Compressed Air and Gas Institute) Innovation Awards
design competition in 2008 with a cash prize of $10,500. The current focus
of the research project is the analysis of the continuum mechanics and
motion generation algorithms, while the full size prototype is being
developed by a group of senior undergraduate design project students.
Researcher: Nick Thayer

HyDRAS-Arm: Automatic Calibration and Intuitive Control of Manipulator Arms
- With partnership with OpenTech, Inc. (Manipulator SBIR
Phase One) HyDRAS-Arm (Hyper-redundant Discrete Robotic Articulated
Serpentine-Arm) is a 9+ DOF serpentine manipulator arm controlled with a
full 3D shape sending 'shape tape' for teleoperation. Automatic Calibration
and Intuitive Control of Manipulator Arms (AIMs) is a software system that
provides simulation, visualization, and advanced control of robotics
manipulator arms using real-time genetic algorithms.
Researcher: Mark Showalter

HyDRAS-Ascent: Design and Analysis for a Pole Climbing Serpentine Robot
- By using a series of actuated universal joints in a
helical configuration, HyDRAS (Hyper-redundant Discrete Robotic Articulated
Serpentine) can wrap around a pole and use a relative neutating motion
between its modules to propel itself along a pole structure. The current
focus of the research is to find the relationships between design and
operational parameters for optimization. Additionally, the force and torque
analysis is being completed. A full scale prototype robot is also being
developed by a group of senior undergraduate student design team.
Researcher: Gabriel Goldman

CIVT: Cam-based Infinitely Variable Transmission
- The Cam-Based Infinitely Variable Transmission (CIVT) is
a novel, highly configurable, ratcheting infinitely variable transmission (IVT)
utilizing a three-dimensional camoid (patent pending) based on the operation
of a planetary gearset. It is unique in both its operation and its possible
applications. It combines the flexibility of both a planetary gearset and an
IVT into one package. Unlike other ratcheting IVTs which produce a
nonuniform output for a uniform input, this transmission can shape the
output to match many periodic waveforms. Therefore, this ratcheting drive
has the unique ability to produce a uniform and continuous output.
Researcher: Derek Lahr

ReCoM: Revolute Compliant Mechanism-Design Methodology
- ReCoM is a novel compliant revolute joint suitable for
both micro and macro scale applications (patent pending). This device is a
simple, monolithic, and planar mechanism which incorporates a number of
interconnected flexible spokes, radially positioned between a hub and rim.
Because of the unique linkage system connecting the spokes, they flex when a
torsional load is applied to the hub but remain stiff to radial loads.
Compliant mechanisms also have zero backlash, are low cost, and do not wear,
making them ideal for use in harsh environments and as replacements for the
conventional mechanical systems in MEMS.
Researcher: Derek Lahr

MARS: Workspace Analysis and Hexapod Gait Generation
- The Multi-Appendage Robotic System (MARS) is a hexapedal
robotic platform inspired by JPL's LEMUR IIa robot. Each of the six limbs of
MARS incorporates a 3DOF, kinematically spherical proximal joint, and a 1DOF
distal joint. The generation of walking gaits for such robots with multiple
limbs requires a thorough understanding of the kinematics of the limbs,
including their workspace. In this research we develop the workspaces for
the limb of MARS in the knee up configuration which range from simple 2D
geometry to complex 3D volume, and analyze its limitations for use in
walking on flat level surfaces, and apply it to the development of adaptive
walking gait algorithms.
Researcher: Mark Showalter
MARS: Gait Generation with CPG for Unstructured Terrain
- Researcher: Robert Mayo

Inertially-Actuated Passive Dynamic Step Climbing Wheeled Robot
- A novel wheeled robot with an inertially actuated sliding
spring-mass system to increase the mobility without requiring active
actuated is developed. Accelerations and decelerations of the robot causes
the sliding mass to shift forward or backward, accomplishing both the
lifting and landing actions necessary to propel a robot over a step. The
effective center of gravity of the robot will change as the sliding mass
moves and a spring reaction will add an additional torque on the robot. If
designed properly, these effects can allow the robot to lift its wheels off
the ground - one axle at a time - and hop over the step.
Researcher: John Humphreys

A Portable Approach to Behavioral Programming for Complex Autonomous Robot Applications
- In this research, an approach to behavioral programming
is developed that provides the designer with an intuitive method for
building contextual intelligence while preserving the qualities of emergent
behavior present in traditional behavior-based programming. This is done by
using a modified hierarchical state machine for behavior arbitration in
sequence with a command fusion mechanism for cooperative and competitive
control. this presented approach is analyzed with respect to portability
across platforms, missions, and functional requirements. Specifically, two
landmark case-studies, the DARPA Urban Challenge and the International
RoboCup Competition are examined.
Researcher: Jesse Hurdus