
- Offer Profile
-
Since more than ten years, we design, develop and manufacture mobile robot systems of all kinds and for customers all over the world. We always try to improve the field of robotics where the traditional, industry approved robots meet the visions, prototypes and experiments of the high-end research facilities.
This is where we want to convert the researchers enthusiasm for new ideas and concepts into reliable, affordable, yet ground-breaking new products.
This is what drives Neobotix.
We provide- Transport robots
- Robots for research
- Robots for entertainment and customer information
- Film and studio automation
Mobile Robots
-
Autonomous mobile robots are the modern descendants of the classical, path-bound driverless transport vehicles. Thanks to advanced sensor technology and intelligent algorithms, they can move freely in all environments, avoid people and obstacles dynamically and reach their destination independently.
Their fields of application are extremely diverse and range from simple but dynamic material transport to the fully automatic placement of sensors and interaction with measuring and test equipment. In research, they serve as demonstrators for AI research, as test platforms for new path planning and localization approaches, or as practice devices for the next generation of robotics developers.




MP-400
-
Small, agile robot for material flow and intralogistics in industrial applications. Automatic charging station and load handling system available.
The mobile robot MP-400 was developed with many innovative ideas specifically for daily use in industry.
Its main task is flexible material transport in intralogistics. The agile, small robot can bridge paths that cannot be realized with floor-mounted conveyors or classic unmanned transport systems.
However, the MP-400 can also be used in more ambitious applications. Whether as a mobile manipulator with integrated robot arm, as an autonomous carrier of special equipment or as an experimental system in robotics research, the MP-400 masters almost all tasks, also with full ROS support.
Payload: up to 150 kg
Dimensions (in mm): 590 x 559 x 411 (LxWxH)
Speed: <1,5 m/s




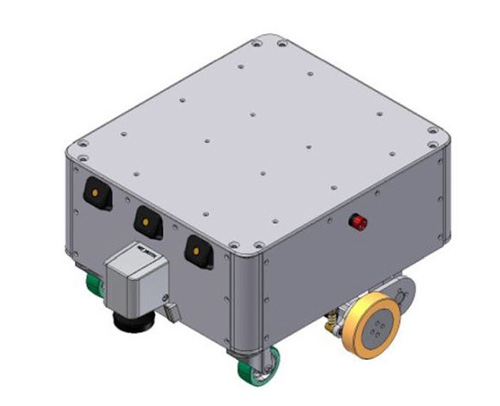
MP-500
-
Compact, industrial grade robot for material flow and intralogistics. Very good system for robotics research when equipped with a robot arm.
Due to its rugged design and the large number of functions and features have made the mobile robot MP-500 very popular in robotics research. It is mainly used in projects searching for new solution in production automation. Here research is done mainly in cooperating robots and mobile manipulators.
The MP-500 can also used in completely new fields of research. In th BetoScan project for example the mobile robot works as autonomous sensor carrier. The joint research project ImRoNet used the MP-500 as telepresence robot and a research institute in Germany uses the mobile robot for developing new fuel cells.
This makes the MP-500 one of the most multifunctional mobile robot available on the market.
Payload: 80 kg
Dimensions (in mm): 814 x 592 x 361 (LxWxH)
Speed: <1,5 m/s




MPO-500
-
Compact, omnidirectional robot with Mecanum wheels. Very good system for robotics research when equipped with a robot arm.
The MPO-500 mobile robot has Mecanum wheels that give it exceptional maneuverability and the ability to move smoothly in any direction.
This allows the omnidirectional robot not only to navigate agily through narrow and twisty environments, but also opens up completely new working possibilities. Robot arms can be quickly moved to new positions, components can be freely positioned and measuring systems can be exactly positioned. Here the user also benefits from the freedom in development by ROS.
Payload: up to 150 kg
Dimensions (in mm): 986 x 662 x 409 (LxWxH)
Speed: <0,8 m/s



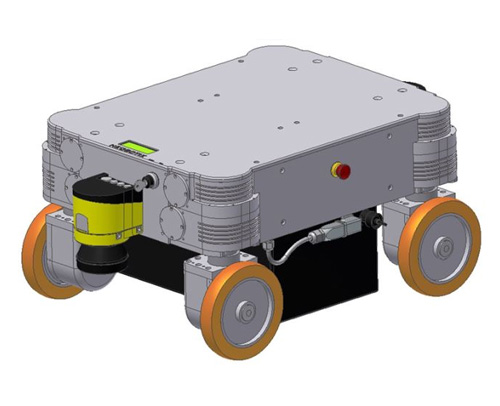
MP-700
-
Strong and stable robot for transportation and research. Ready for integration of two or more robot arms.
he MP-700 has been designed for ease of access and maximum expansion. Thereforse this mobile robot is mainly suitable for the integration of one or two robot arms and additional devices.
Due to the high stability and good mounting possibilities, many other applications are also possible. The basic platform can easily be modified to accommodate and supply even large attachments.
As well as all our products the MP-700 also supports ROS.
Payload: 300 kg
Dimensions (in mm): 786 x 717 x 411 (LxWxH)
Speed: <1.0 m/s

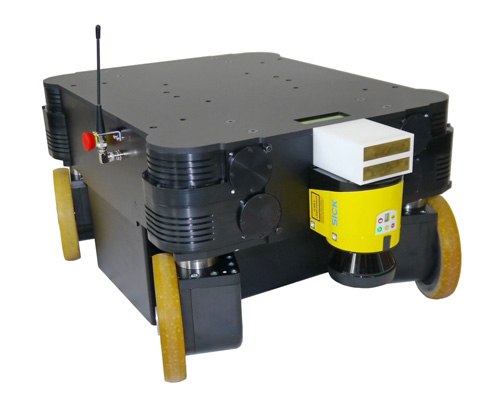

MPO-700
-
Strong, omnidirectional robot with innovative kinematics. State-of-the-art hardware for service robotics research.
The omnidirectional MPO-700 is the ideal basis for high-end service robots. Its four Omni-Drive-Modules enable it to make smooth journeys in all directions. In addition it combines the advantages of classic wheels with the surface mobility otherwise only offered by Mecanum wheels.
The MPO-700's Omni-Drive-Mmodules offer important advantages compared to other omnidirectional drive systems, such as the MPO-500's Mecanum wheels.
The modules are also controlled by ROS.
Payload: 400 kg
Dimensions (in mm): 741 x 509 x 348 (LxWxH)
Speed: <0,9 m/s
Mobile Manipulators
-
Mobile robots with integrated robot arms are usually referred to as mobile manipulators. They are used, for example, for demanding research projects in service robotics or for applications in care.
Mobile manipulators are also becoming increasingly popular in industrial applications. Their tasks range from demanding handling tasks to unusual, unique tasks that cannot be solved with conventional systems.

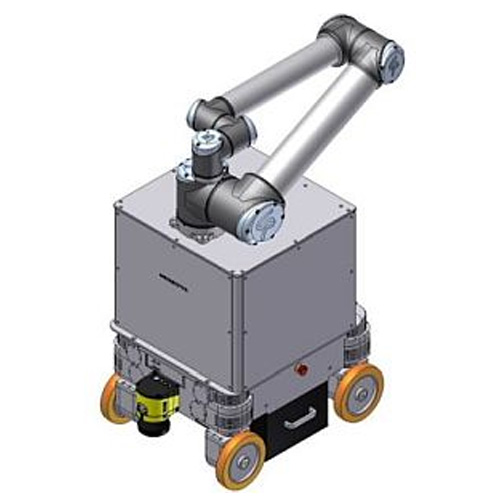
MM-400
-
Mobile manipulator for industrial handling applications and research. Compact, symmetric system for narrow environments.
The mobile manipulator MM-400 combines the basic platform MP-400 and a lightweight arm to a very compact and flexible robot system for research. This makes the MM-400 ideal for applications in very limited spaces where other platforms can no longer manoeuvre.
The Pilz's PRBT, which combines important safety functions with full support for ROS, is a popular robotic arm.
Payload: 60 kg / 110 kg
Payload Arm: 6 kg
Arm: Pilz PRBT
Dimensions (in mm): 590 x 559 x 411 (LxWxH)
Speed: <1,5 m/s

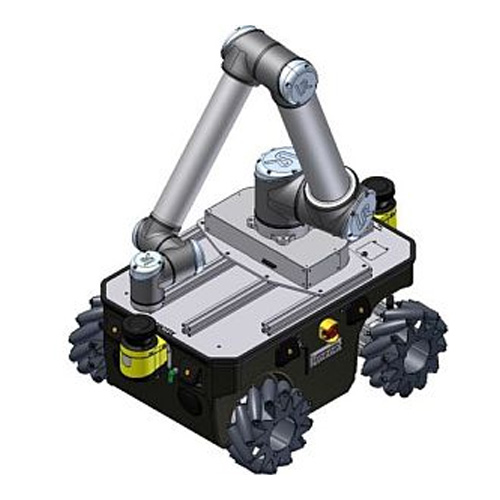


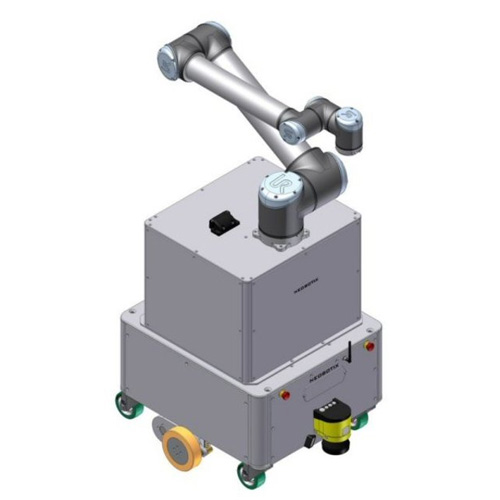
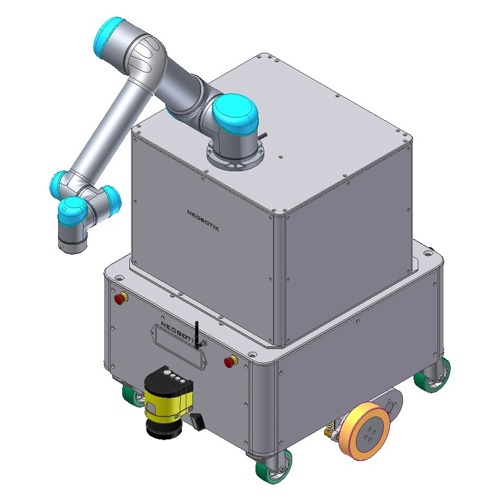
MMO-500
-
Omnidirectional manipulator for service robotics research. Impressive features and easy to control kinematics.
The mobile manipulator MMO-500 is a combination of the omnidirectional robot MPO-500 with a lightweight arm from Universal Robots, Pilz or Schunk.
With its Mecanum wheels, the MMO-500 can move seamlessly in any direction and easily relocate the integrated robot arm. Without complex manoeuvring and kinematic restrictions, the working area of the arm can be considerably enlarged.
The MMO-500 can carry the robot arms of the most important manufacturers. Due to its large footprint and load capacity, the MMO-500 can even accommodate the powerful Universal Robots UR10e, which can handle loads of up to 10 kg.
Platform and arm could be controlled by the open-source-software-framework ROS.
Payload: 30 kg
Payload Arm: 10 kg
Arm: Universal Robots, Schunk
Dimensions (in mm): 986 x 662 x 804 (LxWxH)
Speed: <0,8 m/s
MM-700
-
Mobile manipulator for industrial handling applications and research. Very high payload and sturdiness at a great cost-performance ratio.
The mobile manipulator MM-700 integrates a lightweight arm, for example from Universal Robots, into the mobile robot MP-700. The very high payload and stability of the basic platform MP-700 also makes it possible to easily integrate other arms, such as Baxter from Rethink Robotics or the LBR iiwafrom KUKA.
As the MPO-700 has the largest battery capacity of all Neobotix robots, it can even work autonomously and without a break throughout the day with an integrated robot arm. Platform and arm could be controlled by ROS.
Payload: 180 kg
Payload Arm: 10 kg
Arm: Universal Robots, Schunk
Dimensions (in mm): 898 x 695,5 x 852 (LxWxH)
Speed: <1,0 m/s


MMO-700
-
Omnidirectional manipulator for service robotics research. Impressive features and very smooth movement.
The mobile manipulator MMO-700, a combination of the omnidirectional robot MPO-700 with a lightweight arm, is the high-end model in the field of mobile manipulators.
The use of the Omni-Drive-Modules leads to a very soft driving behavior without vibrations. Compared to vehicles with Mecanum wheels, this is a clear advantage when expensive and sensitive parts have to be transported and manipulated. The MMO-700 is fully omnidirectional and can, for example, easily move its robot arm sideways along the work area if required.
Its robust construction makes the MMO-700 an extremely solid basis for robot arms in various sizes and for a wide range of applications, such as Universal Robots, Pilz or Rethink.
Platform arm could be controlled by the proven open-source-software-framework ROS.
Payload: 300 kg
Payload Arm: 10 kg
Arm: Universal Robots, Schunk
Dimensions (in mm): 741 x 509 x 767 (LxWxH)
Speed: <0,8 m/s
Robot Components
- If you want to design your own robot, you can purchase important components from us. Our Omni-Drive-Modules give your vehicle outstanding mobility in every direction with high payload and smooth running. The matching ROS packages are also available. If you want to integrate several ultrasonic sensors into your autonomous vehicle, our USBoard is a good choice. It publishes data from up to 16 ultrasonic sensors via CAN bus.

Omni-Drive-Module
-
Drive module for omnidirectional platforms
The drive units used in the MPO-700 omnidirectional robot can also be ordered separately.
The ready-to-install module consists of the complete gear unit, two brushless servo motors and two high-quality digital drive amplifiers. Both axes can rotate endlessly, whereby the position of the rotary axis can be determined via a position switch.- Maintenance-free 300W servo motors
- Lifetime lubrication
- Supply voltage 48V or 24V
- Control via CAN

USBoard
-
Interface board for 16 Bosch ultrasonic sensors
- Handles up to 16 Bosch ParkPilot USS4 / URF6 / URF7 ultrasonic sensors
- 4 analogue inputs, voltage range 0 - 5 V
- Wide supply voltage range: 9 - 60 V
- Communication interfaces: RS-232, CAN bus
- Graphical configuration interface (Java)
- Optional ROS interface

IOBoard
-
Microcontroller-Board für various IO and measurement applications
- 16 optically decoupled inputs
- 12 optically decoupled outputs
- 4 relay outputs, max. 2 A
- 4 analog inputs, voltage range 0 - 5 V
- Communication interface: RS232, CAN-Bus
- Supply voltage 8 - 60 VDC, 5 VDC optional

USBoardUSS5
-
Interface board for 16 Bosch ultrasonic sensors and 4 analoge inputs
- Handles up to 16 ultrasonic sensors Bosch USS5
- Measurement range up to 3.3 m
- Sequential measurement or cross-echo mode
- Detects missing and blocked sensors
- 4 analogue inputs, voltage range 0 - 5 V
- Wide supply voltage range: 9 - 60 V
- Communication interfaces: CAN bus and USB, RS-232 optional
- Graphical configuration interface
- Free interface

USBoardUSS5-IP
-
The USBoardUSS5-IP is a variant of the Neobotix USBoardUSS5.
It was designed for more demanding environmental conditions and mounting outside of a protective cabinet. Most of the basic functionality and properties of the USBoardUSS5-IP are identical to the USBoardUSS5. Our online documentation thus mainly describes the differences between the two boards. The most important ones are:
- No analogue inputs available
- Data output via CAN and RS-232, no USB interface
The Robot Operating System - ROS

The Robot Operating System
-
The Robot Operating System, better know as ROS, is an open source framework for autonomous robots of all kinds. A huge international community of robotics developers is working on both improving the framework itself as well as constantly creating new functions, packages and modules.
ROS has grown to be the most widely used standard for controlling autonomous robots. Starting out as a tool for universities and research institutes, ROS now has already made its mark in industrial applications as well.

Always up to date
-
ROS thrives on the continuous interaction and exchange of ideas within the developers' community. The framework's core concept is the ease of replacing existing nodes with new and improved or customised versions. This includes basics like sensor interfaces and device drivers but also advanced features such as 3D mapping or dynamic path planning.
Device manufacturers, system integrators, researchers and private developers all contribute to ROS. This creates and maintains a vast set of tools and possibilities, freely available as open source packages for others to use. Most developers use this existing foundation because it helps them save precious time and focus on creative work. Their results are then made available to other ROS users. This way ROS is always up to date and the best way to get your hands on the latest cutting-edge algorithms.

Full support for Neobotix hardware
-
ROS is a core component of all Neobotix products. Both complete mobile robots and separate components can be used with ROS.
All our robots are delivered with a basic ROS installation and ready for use. This includes all drivers and hardware related nodes as well as reliable packages for creating maps of the environment, for localisation and path planning.
Optional components, like the popular USBoard, can be integrated seamlessly into the robots. They can also be operated as stand-alone devices or be integrated in your own project.
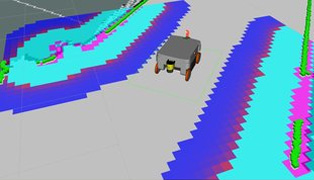
Quick testing in a detailed simulation
-
You can use our extensive and easy to use simulation packages for drafting your project and for developing and offline testing of new software modules.
Beside very detailed 3D robot models these packages also contain realistic worlds and a preconfigured and easy to adjust navigation setup. You can create maps based on simulated sensor output and let the virtual robot explore its environment.
This will give you a good insight into our robots and their capabilities. You can find out how they react to obstacles and changes in the environment and can also experiment with your own modifications.
Online tests with the ROS Development Studio
-
The ROS Development Studio offers the easiest way to test our mobile robots under ROS and get a first impression of their potential.
A guest account is perfect for initial tests and offers many advantages:
- Work with Neobotix robots free of charge
- No time consuming ROS installation
- No client required - work directly in your web browser
- Many helpful tutorials and online courses