Humanoids and Androids

Videos
Loading the player ...
- Offer Profile
- A humanoid robot is a robot
that is based on the general structure of a human, such as a robot that
walks on two legs and has an upper torso, or a robot that has two arms, two
legs and a head. A humanoid robot does not necessarily look convincingly
like a real person.
An android (male) or gynoid (female) is a humanoid robot designed to look as much like a real person as possible, although these words are frequently perceived to be synonymous with humanoid.
On EXPO21XX.com you will find many research projects evolving around humanoids research. Some examples can be seen below. Click on "more info" to see the whole online stand of the university or the company.
Product Portfolio
Humanoid Highlights
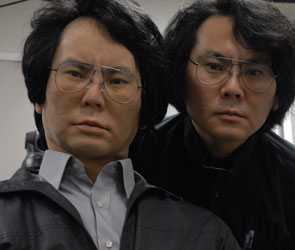
Geminoid
@ Osaka University- Both appearance and behavior are significant issues in the development of humanoid robots. However, designing the robot's appearance, especially to give it a humanoid one, was always a role of the industrial designer. To tackle the problem of appearance and behavior, two approaches are necessary: one from robotics and the other from cognitive science. The approach from robotics tries to build very humanlike robots based on knowledge from cognitive science. The approach from cognitive science uses the robot for verifying hypotheses for understanding humans. We call this cross-interdisciplinary framework android science.

Geminoid-DK
@ Aalborg University- The Geminoid-DK is a tele-operated Android in the
geminoid series. It is made to appear as an exact copy of its master, Asc.
Professor Henrik Scharfe of Aalborg University. Dr. Scharfe is also the
principle investigator of the Geminoid-DK research project.
History of the research
Geminoid-DK is situated at Aalborg University in Northern Denmark.

IbnSina Robot
@ United Arab Emirates University- First Arabic-Speaking Humanoid Robot
Ultimate Mission of the IbnSINA center:
To achieve harmonious and mutually beneficial co-existence (symbiosis) between the natural (humans), the artificial (robots), and the virtual (virtual agents), and to support seamless integration between the physical and virtual worlds.
Android Highlights

iCub
@ Italian Institute of Technology (IIT)- Scientists at the Cognitive Humanoids Laboratory work at the forefront of the robotics and neuroscience research implementing models of cognition in robots of humanoid shape. This heterogeneous group of people aims at understanding brain functions and realizing robot controllers that can learn and adapt from their mistakes. Activities encompass the construction of the hardware, that we call "bodyware", and software which will make, one day, machines of intelligence comparable to humans. We call this technology "mindware". On the bodyware side we developed the iCub, a humanoid robot, shaped as a 4 years old child. Simultaneously, we are addressing the development of the technologies for the next generation of robots based on soft and adaptable materials both for sensing and processing. On the mindware side, the laboratory is involved in the realization of the cognitive skills of the humanoid robot; that is, providing the robot with visual, auditory and tactile perception and the ability to gaze, reach and manipulate objects.

Rollin' Justin @ DLR Institute of Robotics and Mechatronics
- Institute of Robotics and Mechatronics
Research carried out in the DLR Institute of Robotics and Mechatronics is based on the interdisciplinary (virtual) design, computer-aided optimisation and simulation, as well as implementation of complex mechatronic systems and man-machine interfaces. The institute is regarded as one of the worldwide leading institutions in the field of robotics.

ECCEROBOT-2
@ AI Lab - University of Zurich- ECCCEROBOT (Embodied Cognition in a Compliantly
Engineered Robot) is a three-year project funded by the 7th framework
programme of the EU (ICT-Challenge 2, "Cognitive Systems, Interaction,
Robotics") that has the goal to build and control th1 first anthropomimetic
robot and finally, to investigate its human-like cognitive features.
ECCCEROBOT-2, also referred to als EDS (Embodied Design Study) or simply "Max" due to the numerous maxon motors employed has been publicly presented at the Hannover Messe 2010.