Climbing Robots

Videos
Loading the player ...
- Offer Profile
- On EXPO21XX.com you will find many research projects evolving around climbing robots research. Some examples can be seen below. Click on "more info" to see the whole online stand of the university or the company.
Product Portfolio
Climbing Highlights

Stickybot
@ MIT - Biomimetic Robotics Lab- Stickybot is a quadruped robot capable of climbing smooth surfaces, such as glass, acrylic and whiteboard using directional adhesive. The design is mostly inspired by morphologic study of the best climber, Gecko lizard. The robot is operated by 12 servo motors controlled by PIC controller with force sensors. Stickybot is the incarnation of biomimetic design constituents that I invented, including underactuated hierarchical system, cable driven actuation and passive compliance-based force control scheme. I initiated and designed this robot for testing of synthetic gecko dry adhesion April 2005. After an year's furious effort on foot design, push-pull cable actuation mechanism, Stickybot succeeded to climb glass surface reliably.

SpaceClimber
@ University of Bremen- The goal of the "SpaceClimber" project is the development of a biologically inspired, energy-efficient and adaptively free-climbing robot for steep slopes. This project builds on the experience of the ARAMIES project (DLR Grant No. 50JR0561 & ESA Contract No. 18116/04/NL/PA)and the SCORPION project (DARPA Grant No. N0014-99-1-0483 & NASA-USRA Grant No. 8008-003-002-01). SpaceClimber should prove that walking robotic systems present a solution for future missions on difficult terrain, in particular missions in craters or rock fissures. The robotic system that we intend to develop should be able to conquer irregular slopes of up to 80% and should be in a position to navigate with local autonomy using built-in sensors.
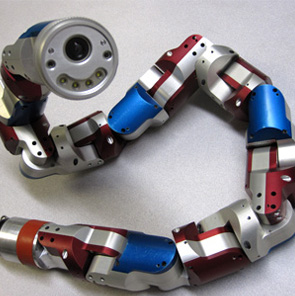
Snake Bot
@ Carnegie Mellon University- Snake robots can use their many internal degrees of freedom to thread through tightly packed volumes accessing locations that people and machinery otherwise cannot use. Moreover, these highly articulated devices can coordinate their internal degrees of freedom to perform a variety of locomotion capabilities that go beyond the capabilities of conventional wheeled and the recently developed legged robots. The true power of these devices is that they are versatile, achieving behaviors not limited to crawling, climbing, and swimming.

SentryBot II
@ University of Bremen- Based on an autonomous security robot developed at the DFKI, a cooperating robot system will be built. The prototype of the existing SentryBot is equipped with motion detectors based on radar and infrared, as well as with a camera. Currently, four such robots equipped with recharging units are being constructed for the surveillance of the Bremen Robotics Lab. Based on experience gained with our SentryBot study, a larger model has been developed which may be used outdoors and in areas which are more difficult to get to (i.e. staircases) and which features an infrared camera as well as a zoom camera.
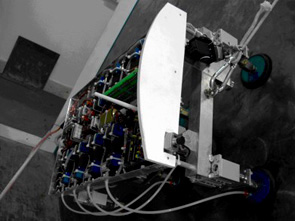
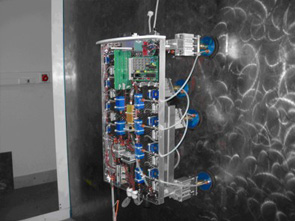
Spiderbot II: A climbing robot for industrial inspection @ University of Catania
- Spiderbot II is a new climbing robot developed in cooperation with Automation Service srl, in the framework of a regional research project. The aim of the project is to realize a prototype of climbing robot, able to work in harsh industrial environment. The robot can perform NDI (Non Destructive Inspection) using different moving video cameras and other sensors (like gas sensor), while a remote operator can drive the robot and read on-board sensors from a base station placed in a safe area. The video cameras images are sent over an analog RF channel in the 2.4GHz band. The main structure of the robot is based on the same principle of the Spiderbot robot (developed in past research activities) and is composed by two sliding frames pneumatically actuated. The internal frame can slide and rotate with respect the external one. Each frame has four standard suction cup for adhesion to any kind of non-porous surfaces with medium-low roughness. The suction cup are suited for harsh environment like oily, scratched or dusty surfaces. Moreover they are also pneumatically actuated, to allow robot steps. The entire structure is built aluminum alloy and weights about 20 kg. The actual payload is about 5 kg. With respect to the Spiderbot project, the new system has been better designed as regards gripping and payload specification. Moreover robustness of the communication protocol over an RS485 channel between robot and base station has been improved.