Navigation : EXPO21XX > ROBOTICS 21XX >
H24: Underwater Robots Research
> Biorobotics Laboratory - BioRob
Biorobotics Laboratory - BioRob

Videos
Loading the player ...
- Offer Profile
- The Biorobotics Laboratory (BioRob in short, formerly the Biologically Inspired Robotics Group, BIRG) is part of the Institute of Bioengineering in the School of Engineering at the EPFL. We work on the computational aspects of movement control, sensorimotor coordination, and learning in animals and in robots. We are interested in using robots and numerical simulation to study the neural mechanisms underlying movement control and learning in animals, and in return to take inspiration from animals to design new control methods for robotics as well as novel robots capable of agile locomotion in complex environments.
Product Portfolio
Amphibious Robotics
- Our aim is to build biologically inspired amphibious snake (or eel/lamprey-like), salamander, fish and centipede-like robots. The goals of these projects are three-fold: (1) to build amphibious robots for outdoor robotics tasks, taking inspiration from real animals (2) to use the robots as a test-bed for novel types of adaptive controllers based on the concept of central pattern generators, and (3) to use the robots to investigate hypotheses of how locomotion-controlling neural networks are implemented in real animals. We are currently testing the control of different types of locomotions using central pattern generator models inspired by our numerical studies of lamprey locomotion.
Projects

AmphiBot: an amphibious snake robot
- The aim of this project is to build a biologically
inspired amphibious snake-like (or eel/lamprey-like) robot, called AmphiBot.
The goals of the project are three-fold: (1) to build an amphibious robot
for outdoor robotics tasks, taking inspiration from snakes and elongate
fishes such as lampreys, (2) to use the robot as a test-bed for novel types
of adaptive controllers based on the concept of central pattern generators,
and (3) to use the robot to investigate hypotheses of how
locomotion-controlling neural networks are implemented in real animals. We
are currently testing the control of different types of locomotions using
central pattern generator models inspired by our numerical studies of
lamprey locomotion. The latest generation is Amphibot III, which can swim
with speeds similar to a human, see a video of a friendly human-robot race.
The elements of that robot are also used to serve as spine elements of our
Salamandra robotica II robot.
The project is now funded by the Envirobot project as part of the swiss Nano-Tera program. In that project will improve the robot (fourth generation, Amphibot IV) and equip it with multiple sensors for pollution detection in lakes.

Salamander-like Robot : Salamandra robotica
- We are glad to show Salamandra robotica II, the new
generation of our amphibious salamander-like robot.The robot is described in
an article to appear in the IEEE Transactions in Robotics, and has been
invited to the Innorobo 2013 robotics exbibition that takes place from March
19 to March 21 2013 in Lyon.
Compared to its predecessor Salamandra robotica (see below), the new robot swims more than twice as fast, is equiped with foldable limbs, and embarks more powerful microcontrollers that allow distributed computation of our models of spinal cord neural networks as well as the simulation of muscle properties. It is one of the few robots, if not the only one, that can swim, crawl, and walk. Its modular design allow us to rapidly change its morphology (e.g. make it longer, add or remove legs, etc.). Also its modularity means that each module has its own microcontroller, battery, and motors, and therefore we can split the robot in different parts and it would still work. This can have interesting implications in terms of robustness against damage. For instance, the robot could loose parts of its body and still be able to walk...

Fish-like Robot : BoxyBot
- We
have designed and constructed an amphibious fish robot capable of swimming
and crawling. The goal of the project is two-fold: (1) the robot serves as
test-bed for our locomotion controllers based on systems of coupled
nonlinear oscillators (CPGs) and (2) the robot is used in an interactive
exhibition at EPFL, the Forum Decouvertes. The robot is constructed using
the same elements as our salamander robot Salamandra robotica.
The control architecture of the robot is constructed around a central pattern generator (CPG) implemented as a system of coupled nonlinear oscillators, which, like its biological counterpart, can produce coordinated patterns of rhythmic activity while being modulated by simple control parameters. Using the CPG model, the robot is capable of performing and switching between a variety of different locomotor behaviors such as swimming forwards, swimming backwards, turning, rolling, moving upwards/downwards, and crawling. These behaviors are triggered and modulated by sensory input provided by light, contact, and water sensors.

Salamander-like robot : Pleurobot
- We present the new salamander-like robot Pleurobot.
Contrary to our previous bio-inspired approaches, in this new approach we
make use of the recent advances in cineradiography to benefit from the
advantages that a biomimetic design can offer. We recorded three-dimensional
X-ray videos of salamanders, Pleurodeles waltl, walking on ground, walking
underwater and swimming. Tracking up to 64 points on the animal’s skeleton
we were able to record three-dimensional movements of bones in great detail.
Using optimization on all the recorded postures for the three gaits we
deduced the number and position of active and passive joints needed for the
robot to reproduce the animal movements in reasonable accuracy in
three-dimensions.
By design Pleurobot provides torque control for all the active joints, which enables us to apply our neural network models of the spinal cord neural circuits (called Central Pattern Generators) of the salamander and to activate virtual muscles to replicate the recorded animal movements along with realistic viscoelastic properties. This is particularly important in order to get a fundamental understanding of vertebrate motor control.
Dynamical Systems
- Dynamical Systems and Neuroscience at Biorob
The theoretical approaches pursued in the Biorobotics Laboratory can be divided broadly into two subfields, dynamical systems and biological modeling. Projects
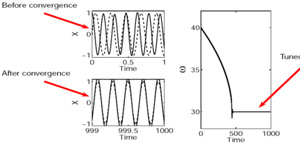
Adaptive Frequency Oscillators
- Our first attempt toward adaptive dynamical systems was to develop the concept of adaptive frequency oscillators, which are oscillators that can adapt their parameters to learn the frequency of any periodic input signal. It means that they change their parameters in order to have an intrinsic frequency that corresponds to the frequency of the input. This mechanism go beyond mere synchronization since the new frequency stays encoded in the system, even if the teaching signal disappears and it works for any initial conditions.
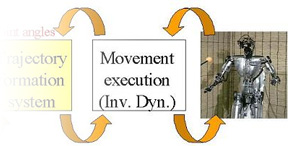
Dynamical Movement Primitives
- This project, carried out in collaboration with Stefan
Schaal (USC) and Jun Nakanishi (ATR), aims at developing controllers for
learning by imitation with a humanoid robot. The controllers are based on
nonlinear dynamical systems, and use locally weighted regression techniques
to learn complex, discrete or rhythmic, movements demonstrated by a human
subject. These controllers can be considered to be discrete or rhythmic
pattern generators which can replay and modulate the learned movements,
while being robust against perturbations. The controllers have been tested
to learn a series of movements (e.g. tennis swings and drumming movements)
with a humanoid robot.
The controllers are also used in our Virtual Trainer project (collaboration with Carolee Winstein, Department of Biokinesiology and Physical Therapy, USC) which aims at using a dynamic humanoid simulation for demonstrating and supervising rehabilitation exercises in stroke-patients. The system will be able 1) to create a database of exercises through the recording of movements shown by a physiotherapist, 2) to demonstrate selected exercises to the patient, 3) to monitor how well the patient is performing the exercise, 4) to point to errors and suggest corrections, and 5) to gradually increase the difficulty of the exercises depending on progress, following a rehabilitation program as defined by the physiotherapist. The system therefore relies on a process of demonstration and imitation which can also find applications in humanoid robotics.
Programmable Central Pattern Generators
- Central Pattern Generators (CPGs) are increasingly used
to control the locomotion of autonomous robots, from humanoids to
multi-legged insect-like robots. However, very little design methodologies
are available to create CPGs for a specific task. Most of the time the
design of CPGs is quite difficult since its different parameters have to be
tuned by hand or by an optimization algorithm.
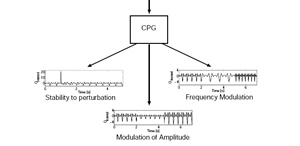
In this project, we investigate how we can design a generic CPG structure in which we can encode any periodic pattern and for which generic properties come for free, such as stability against perturbations and modulation of the periodic pattern in frequency and amplitude.
The main properties we want a CPG to have are the following:- Easy encoding of multi-dimensionnal periodic patterns
- Stability against perturbations (stable limit cycle)
- Easy modulation of the amplitude and of the frequency of the encoded pattern
- Synchronization properties (with other CPGs, with the environment or with the body dynamics)
Lamprey and Salamander Modeling
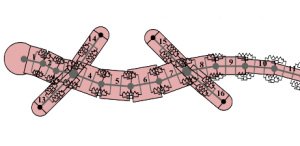
- This project investigates the anguiliform swimming of the
lamprey, one of the earliest vertebrates. Following the work of Orjan
Ekeberg, we developed a neuromechanical simulation of the lamprey (i.e. a
simulation composed of both a neural network and a biomechanical model) to
investigate the functioning of central pattern generators for swimming. This
project uses genetic algorithms to automatically design part of the neural
networks given a description of the desired behavior of the complete system.
This approach has many interesting properties both for computational
neuroscience - by fitting a model to biological data, and automatically
setting parameters instead of hand-tuning them - and for robotics - by
optimizing a controller in terms of speed of swimming, or ability to induce
turning, for instance.
Central pattern generator models inspired from the lamprey are currently used in Amphibot, our amphibious snake/lamprey robot.
Humanoid Robotics
- Humanoid Robotics at Biorob
Our research on Humanoids Robotics is four-fold:- A control architecture for discrete and rhythmic movements,
- Learning of new trajectories by imitation
- Agile whole-body locomotion
- Symbiotic man-machine interactions in wearable exoskeletons to enhance
mobility for paraplegics
Projects

Control architecture for discrete and rhythmic movements
- Humans are able to adapt their movements to almost any
new situations in a very robust, seemingly effortless way. To explain both
this adaptivity and robustness, a very promising perspective is the modular
approach to movement generation: Movements results from combinations of a
finite set of stable building blocks of movements organized at the spinal
level and called motor primitives.
In the framework of the RobotCub project, we have developed an architecture for the generation of both discrete and rhythmic movements based on the concept of motor primitives. Up to now we have applied this architecture to two tasks: (i) drumming and (ii) crawling and reaching.

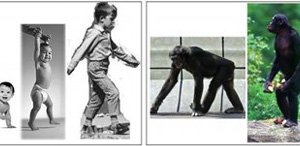
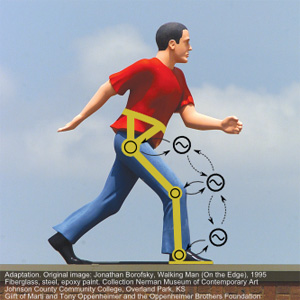
Neuromuscular controller (Symbitron)
- Bipedalism is considered as one of the first distinctive
feature developed by the early hominids, compared to their cousins apes.
This unique characteristic of human beings has always intrigued scientists
and thus has been extensively studied. In the past decades, modeling of
human walking has gained particular interest in research, with the venue of
computers and increasing computational power. Modeling of human walking is
of particular interest in the biomechanical and medical field, as it can
give insights in the design of limb prosthesis, providing crucial
information regarding the movement of the limb.
Moreover, it is also important for the design of limb orthoses, devices used to modify the skeletal and neuromuscular systems, which are used in rehabilitation by assisting movement of people with walking difficulty (e.g. due to neurodegenerative diseases, such as multiple sclerosis or due to spinal cord injury), or assisting people with injuries during their rehabilitation.
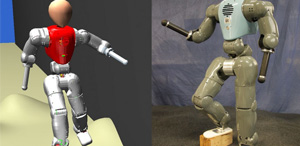
Agile whole-body locomotion (Walkman)
- WALK-MAN is a 4 years integrated project (IP) funded by the European Commission through the call FP7-ICT-2013-10. The project started on September 2013 and has the goal to develop a robotic platform (of an anthropomorphic form) which can operate outside the laboratory space in unstructured environments and work spaces as a result of natural and man-made disasters.
Modular Robotics
- Modular Robotics at the Biorobotics Laboratory
Biorobotics Laboratory is featuring two hardware Modulare Robotics platforms; Roombots and Yamor. Roombots modules are designed to self-assemble into changing, active every-day environment elements, e.g. pieces of furniture. As they have multi-purpose features they can be used to assemble legged robots, like quadruped robots (link simulation results). The Yamor project is an earlier project, featuring one-degree of freedom self-sufficient modules with Bluetooth scatternet communication. They are assembled using a pin-and-hole plug system. The Locomorph project is a current EU-project Projects
Locomorph
- Locomorph’s main objective is to apply the concept of
morphology and morphosis to achieve efficient and robust robotic locomotion
and movements, in particular, with increased self-stabilization, energy
efficiency, maneuverability, and adaptivity to unknown environment.
Locomorph combines multidisciplinary approaches from biology, biomechanics,
neuroscience, robotics, and embodied intelligence to investigate locomotion
and movements in animals and robots, focusing on two concepts: morphology
and morphosis.
Morphology: to explore various morphological factors (i.e. shape, mass distribution, sensory distribution, compliance, damping, limb segmentation, trunk/torso configuration, joint's geometry, etc.) to generate novel and optimal robotic designs for increased self-stabilization, energy efficiency (by restoring mechanical energy), maneuverability, and adaptivity to unknown environments.
Morphosis: to extend the concept of exploiting morphology further by investigating morphing, i.e. changing morphology. Voluntary morphosis – the ability to self-adjust own morphology – as a valuable skill for robots, enabling the robots to increase their adaptivity to current tasks and environments. Involuntary morphing is also a relevant issue, since it can occur in robots because of injuries or other external causes.
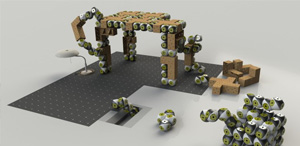
Roombots
- This project funded by the Swiss NCCR in Robotics explores the design and control of modular robots, called Roombots, to be used as building blocks for furniture that moves, self-assembles, and self-reconfigures. Modular robots are robots made of multiple simple robotic modules that can attach and detach (Wikipedia: Self-Reconfiguring Modular Robotics). Connectors between units allow the creation of arbitrary and changing structures depending on the task to be solved. Compared to "monolithic" robots, modular robots offer higher versatility and robustness against failure, as well as the possibility of self-reconfiguration. The type of scenario that we envision is a group of Roombots that autonomously connect to each other to form different types of furniture, e.g. stools, chairs, sofas and tables, depending on user requirements. This furniture will change shape over time (e.g. a stool becoming a chair, a set of chairs becoming a sofa) as well as move using actuated joints to different locations depending on the users needs. When not needed, the group of modules can create a static structure such as a wall or a box. Our dream is to provide multi-functional modules that are merged with the furniture and that lay users and engineers can combine for multiple applications.

Yamor
- We have designed hardware for modular robot units called
Yamor (Yet another Modular Robot). The aim of the project is to create robot
units that can rapidly be attached to each other in order to create
arbitrary multi-unit robot structures. We are interested in developing
adaptive algorithms that use local interactions rules between units in order
to optimize the global behavior of the multi-unit structure.
Yamor units have the following characteristics:- each unit is autonomous in terms of power, sensing, actuation, and computing,
- they are driven by heavy-duty servos such that one unit can lift up to 3 others,
- they communicate via BlueTooth (i.e. no need for electrical connections between units),
- they are equiped with an FPGA and/or ARM processors for providing flexible computational power,
- they can be attached and detached manually from each other by a screw-and-pin system in multiple ways, which allows us to create different robot configuations.
Quadruped Robotics
Projects

Cheetah-cub robot
- We are glad to present Cheetah-cub, a compliant quadruped
robot with the size of a small house cat, or a young cheetah cub. The robot
weights 1kg and is approximately 21cm long. It reaches 1.42m/s speed, almost
seven body lengths per second. This makes Cheetah-cub robot the fastest
running quadruped legged robot under 30kg.
Cheetah-Cub has several interesting features, especially when compared to larger and stiffer quadruped robot designs. 1) It is, to the best of our knowledge, the fastest of all quadruped robots below 30kg (in terms of Froude number and body lengths per second). 2) It shows self-stabilizing behavior over a large range of speeds with open loop control. 3) It is lightweight, compact, electrically powered. 4) It is cheap, easy to reproduce, robust, and safe to handle. This makes it an excellent tool for research of multi-segment legs in quadruped robots.
Oncilla-robot
- At Biorob we are developing a novel, compliant, quadruped
robot as one part of an FP7 European project (AMARSi: Adaptive Modular
Architectures for Rich Motor Skills, project start March 2010, project
duration 48 months). Goal of the AMARSi project is to improve biological
richness of robotic motor skills. The quadruped hardware development is
cooperative work together with the Reservoir Laboratory at Ghent University,
Netherlands. The AMARSi project has more than 10 project partners.
We are developing the new quadruped platfrom also based on the design of our Cheetah-cub robot, a compliant, quadruped robot. New features of the Oncilla-robot include a different actuator architecture, closed-loop control with joint position- and load/torque sensors, and on-board power supply. Oncilla-robot inherits well-tested features like Cheetah-cub's pantograph, three-segment leg design, and its cable driven leg length actuation.
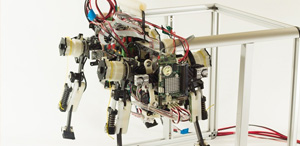
Bobcat-robot
- Bobcat robot was designed and implemeted to evaluate the
effects of active spine movement within a quadruped, bounding robot.
The robot's unique feature is an actuator mounted in its spine, with the option for a series-elastic actuation. In this case, another spring is coupled to the RC-servo motor. The spine actuator works in the robot's pitching direction, and the robot can bend its spine into a convec or concave shape.
Bobcat robot's leg design is two-segment, with a gravity-loaded spring at the knee joint. Two actuators (standard RC servo motors) per leg articulate a) the hip joint and b) the knee joint. The robot's fornt and hind leg are identical, front and hind "knees" are oriented backwards. Bobcat robot's leg length actuation is identical that of Cheetah-robot: a cable mechanism is actively shortening the robot's legs, individually for each leg. The springs, placed in the knee joints, are the robot's only mean to extend the legs.
Rehabilitation Robotics
Rehabilitation robotics at BIOROB
- Rehabilitation robotics has been a new field of
investigation for BioRob since 2009. Our goal is to embed our knowledge
about advanced control techniques (e.g. Central Pattern Generators) and
optimization into robotics platforms providing rehabilitation therapy to
disabled persons (like e.g. stroke patients) and the elderly. So far, our
investigations focus on the rehabilitation of locomotion (lower limb).
People suffering from walking deficiencies have better recovery expectancies if they undergo intensive rehabilitation programs. However, standard rehabilitation programs necessitate intensive efforts of one, two, or even three physiotherapists to move the patient, this being potentially painful for the therapists as well. Rehabilitation robotics is a promising research avenue to take over some of this time- and energy-consuming workload. The goal is not to replace the physiotherapist, but to relieve him of the most painful aspects of his task, eventually leading to longer and/or more frequent training sessions. In parallel, developing autonomous rehabilitation robots might also be useful to extend the therapy at home. Finally , we also expect that some design methodologies developed for rehabilitation robotics might also be adapted to active prosthesis design.