Synapticon

Videos
Loading the player ...
- Offer Profile
- Synapticon is a dynamic international company based in Schönaich (Stuttgart)/Germany, with offices in Redwood City/California, Shanghai/China and Belgrade/Serbia. Our mission is to rethink and deliver solutions for embedded computing and control systems to improve the future progression of robotics, automation and the internet of things. We are committed to expediting technical progress and integrate it into products and services that enable our customers to provide leading-edge, high-quality products. Our team is comprised of technology enthusiasts from all over the world, with expertise in various areas of engineering and management. Our common passion is to develop advanced technologies, sophisticated products, serve customers in challenging projects and to build an innovative as well as sustainable corporation.
Product Portfolio
TECHNOLOGY
-
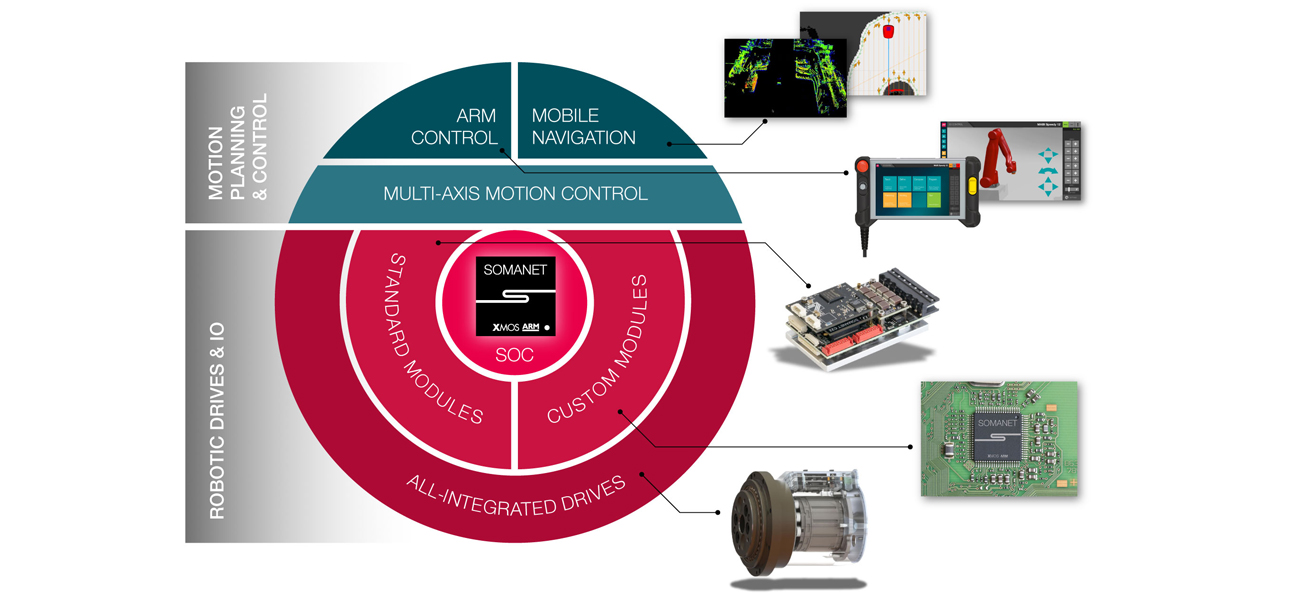
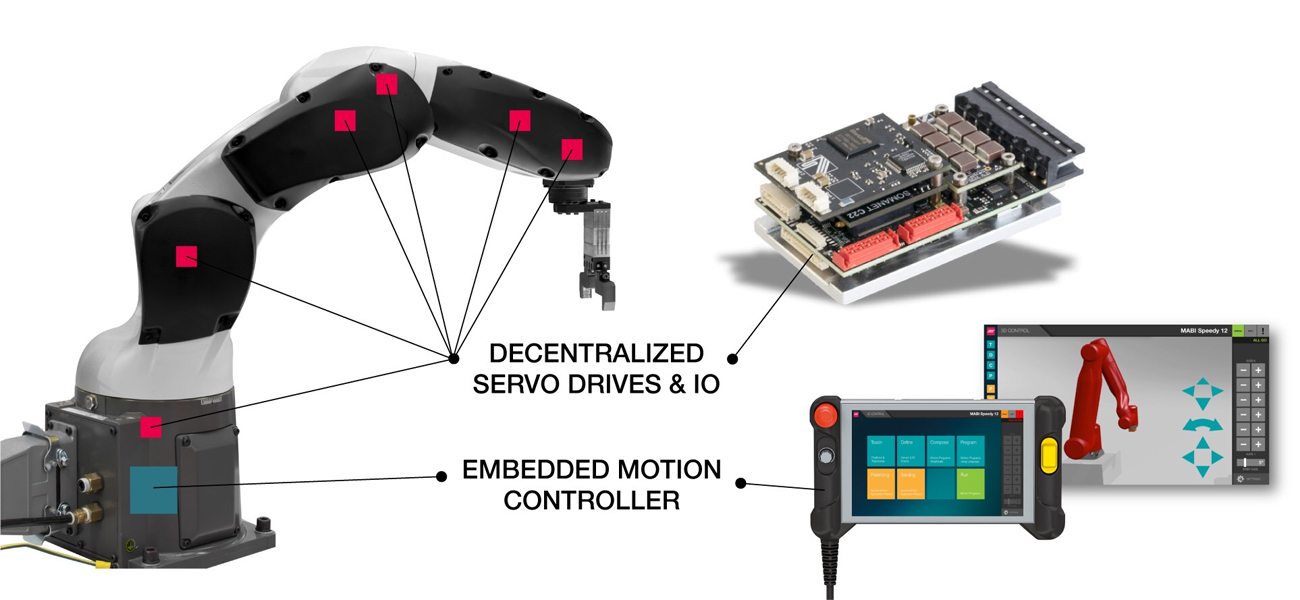
ROBOTICS EMBEDDED
Synapticon provides a comprehensive portfolio of motion control-related technology to robot OEMs. The platform comprises the full stack of elements required by modern robotic products, from Robotic Drives & IO hardware to Motion Planning & Control software. SMART SOFTWARE ENABLING ECONOMIC HARDWARE
- Synapticon‘s approach is to lower the cost of mechanical hardware by controlling quality-influencing physical factors in software. The basic principle of this is to combine the computation of models of the physics of a drive, such as the phase characteristics of the motor and the backlash of the reducer, with high-resolution and high-speed sensing of corresponding physical metrics. This way, Synapticon‘s drive control technology is able to substantially improve the performance and quality, from eliminating unwanted disturbing torque effects of low-cost motors to virtually adjusting the backlash of cycloidic reducers.
CONFIGURABLE REAL-TIME PERFORMANCE
- Synapticon SOMANET SoCs are based on xCore and ARM processor architectures and offer 8 to 32 programmable 32bit RISC cores per chip. This highly parallel, hard real-time technology, combined with a broad range of SOMANET Soft IP Blocks, enables to integrate dedicated industrial communication, sensor data acquisition and motor control in a single device. Using SOMANET SoCs, a board design can be easily scaled by adding more instances of an application to a System-on-Chip, for example multiple motor controllers. If more resources are required than a single device can offer, multiple devices can be connected through xConnect interface technology. Learn more about the xCore architecture from our technology partner XMOS.
SEAMLESS PROTOTYPE TO MASS PRODUCT
- Rapidly start building your prototype with LINK Integrated Drives, quickly configure custom control systems with SOMANET Modules and realize your series design using SOMANET SoCs. With Synapticon’s Embedded Robotics Platform, the formerly long, multi-phase process from early conceptual R&D until mass production becomes a seamless flow.
ROS IS OUR MOTHER TONGUE
- Synapticon is a born ROS community member and early supporter of ROS Industrial, ROS for Products and, as a result, ROS 2 efforts. We consider ROS the lubricant for most robotic innovations since 2010 and the glueware for a continously growing number of robotic end-products. Synapticon SOMANET and LINK motion control and drive products are ROS compatible and Synapticon LONA autonomous navigation is based on ROS.
APPLICATIONS
- Synapticon's technology is enabling the world of robotics
Traditional Robot Arms

Collaborative Robot Arms

Professional Service Robots & AGVs

Consumer Robotics
PRODUCTS: INTELLIGENT ROBOTIC MOTION
Everything robot designers and robot OEMs need to make their products move, perform and excel.
FROM PROTOTYPE TO MASS PRODUCT
To produce 10 or 100.000 systems a year? Affording time to develop electromechanics from scratch or rather focus on product design and software innovation? Invest in seamless mechanical integration or better use a standard and be fast? Robotic products and the companies developing and producing them are highly diverse. Finally there is a drive and IO component platform that adopts to their individual needs. Enabling a seamless flow from prototype to mass product, with Synapticon you can choose the physical state of your control system as you go.
Somanet
-
ROBOTIC MOTION CONTROL
SOMANET is the heart of Synapticon’s Embedded Robotics Platform. The product line comprises SOMANET Modules and SOMANET SoCs, offering ready-to-use as well as customizable servo drive and IO components and a corresponding multi-axis motion control API. SOMANET is completed by the Robot Arm Motion Control Suite, a fully featured robot arm control and programming solution, developed in collaboration with our technology partner Vectioneer. Somanet OBLAC Tools

-
Beginners and experts welcome
Commissioning of your SOMANET Drive must be as easy as setting up your smartphone. Set up and test your motor, encoder and fieldbus without reading tons of documentation. Tune and test your motion performance supported by automated tuning functions. Once routined, the expert interface provides quick and direct access to all parameters.
Easy set up
Connected with a single EtherCAT cable. Installation and update of firmware on multiple devices simultaneously.
Wizard
Guided and expert mode setup process. Advanced troubleshooting and indication of solutions.
Auto-Tuning
Automatic motion controller tuning. Intuitive user interface offering a multitude of tuning functions.
Playground
Operate the drive in Torque, Speed or Position mode without running you motion application. ROBOT MOTION CONTROL

-
KINEMATICS, DYNAMICS & MOTION PROGRAMMING
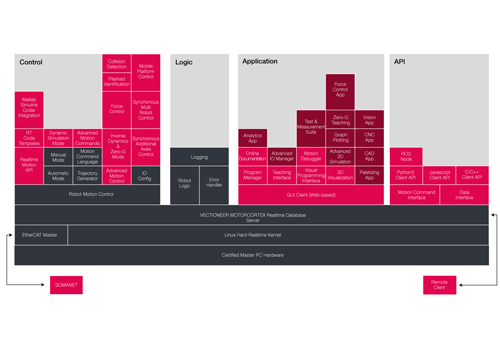
The MOTORCORTEX Motion Control Suite, developed by Synapticon partner Vectioneer, is a highly innovative, fully featured high-performance motion control software suite, including a robot arm control and programming solution. The software was created in close collaboration with Synapticon from its inception. The MOTORCORTEX Robot UI has a focus on collaborative robotics, but can be used for any multi-axis kinematics. MOTORCORTEX is a vast standard software stack that runs on a broad range of industrial and embedded computers, and is individually configured for a given OEM product. INCLUDED FEATURES
-
MOTORCORTEX CORE
MOTORCORTEX is a hard-real-time Linux-based Control System for high-end industrial applications. It provides real-time control of industrial hardware over EtherCAT and a very high-performance communication layer to higher level applications, such as a User Interface or Data Analysis Tools.
MOTORCORTEX allows high-speed streaming communication directly to the webbrowser (without an intermediate server), which is a game-changer in industry. It is now possible to build highly-responsive web-applications for extremely smooth interaction with machines.
MOTORCORTEX has open API’s for all major languages like Javascript, Python and C++. This offers much more freedom than current industrial control systems and allows true Industry 4.0 applications with only a few lines of code. Communication to legacy PLC systems is supported through OPC-UA.
Communication with MOTORCORTEX is as easy as setting up a simple webpage. With a few lines of Javascript code you can connect to your machine directly and securely from any Webbrowser and exchange data at blazing speeds. No other industrial communication system is as easy to setup. MOTORCORTEX-based Applications are already setup to share all their data automatically in the Realtime-Database, so external applications or services can access the data.
MOTORCORTEX ROBOT
MOTORCORTEX Robot is a complete application suite for any type of robot. Both Serial Mechanisms (e.g. Anthropomorphic, Scara) as well as Parallel Mechanisms (Hexapods, Delta-robots) are supported. Features include:- Path planning (cartesian motion, joint motion)
- Forward and inverse Kinematics and Dynamics
- Motion Programming Language (move commands, set , get , math operators, unlimited variables, flow control (loop, if), triggers)
- User interface (browser-based), so it can run on any modern mult-touch tablet or laptop
- Manual Control (Smooth Jogging)
- Compliance mode (for suitable robot hardware)
- Collision Detection
- Moving Reference Frames (for operation on for instance a conveyor belt)
- Toolchanging
- Palletizing Wizard
- Motorcortex open data interface (all robot internal data is available through API)
- Data Streaming interface (option), to stream setpoint data in realtime to the robot
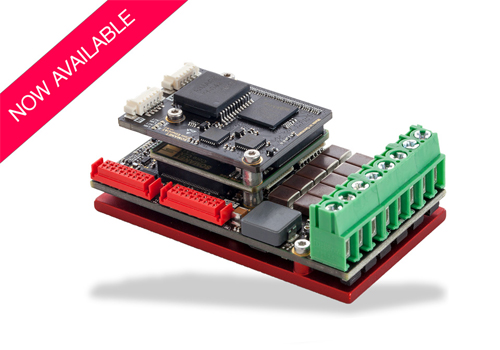
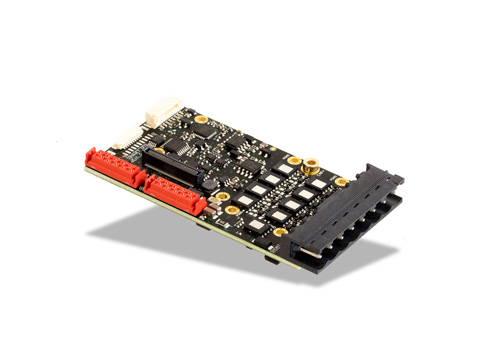
Somanet Servo Drives
- SOMANET Nodes are fully assembled and tested, ready-to-use SOMANET Module combinations.
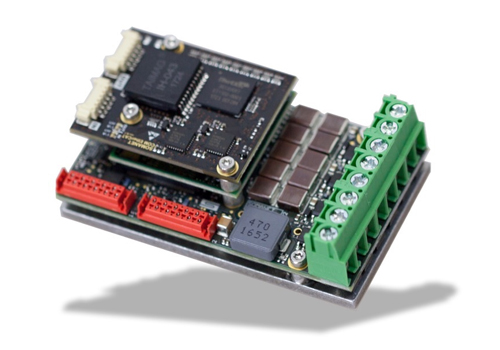
SOMANET Servo Node 1000 EtherCAT
-
Featuring Com EtherCAT, Core C2X and Drive 1000, the SOMANET Servo Node 1000 EtherCAT controls and drives one permanent magnet synchronous motor (PMSM, BLDC) up to 1000 Watt nominal power and can be also be used to drive two brushed DC motors of the same wattage.
SOMANET Servo Nodes: Meet the most compact and flexible embedded EtherCAT Servo Drives.- Number of PMSM (BLDC) / brushed DC motors : 1 / 2
- Supply voltage nominal / max :12 - 48 / 55 V DC
- Rated input current / phase current : 22 A / 32 A RMS
- Maximum phase current : Software control: 40A; Hardware protection: 53A (> 14us)
- Rated continuous output power :1000 W
- Efficiency : 98%
- Position feedback sensor support (2 ports) : Hall, Incremental Encoder (QEI, ABI, ABC), BiSS-C, SSI, SPI
- Analog inputs (auxiliary) : 4 × configurable (0-5 V, 0-10 V, 0-20 V, ±5 V, ±10 V)
- Digital inputs : 6 × GPIO / SPI / I²C
SOMANET Servo Node 250 EtherCAT
-
Featuring Com EtherCAT, Core C2X and Drive 250, the SOMANET Servo Node 250 EtherCAT controls and drives one permanent magnet synchronous motor (PMSM, BLDC) up to 250 Watt nominal power and can be also be used to drive two brushed DC motors of the same wattage.
SOMANET Servo Nodes: Meet the most compact and flexible embedded EtherCAT Servo Drives.- Number of brushless / brushed DC motors : 1 / 2
- Supply voltage nominal / max : 12 - 48 / 60 V DC
- Rated input current / phase current : 5.5 A / 8 A (RMS)
- Maximum continuous output power : 250 W
- Efficiency : 98%
- Position feedback sensor support (2 ports) : Hall, Incremental Encoder (QEI, ABI, ABC), BiSS-C, SSI, SPI
- Analog inputs (auxiliary) : 4 × configurable (0-5 V, 0-10 V, 0-20 V, ±5 V, ±10 V)
- Digital inputs : 6 × GPIO / SPI / I²C

SOMANET Servo Node 50 Duo EtherCAT
-
Featuring Com EtherCAT, Core C2X and Drive 50 Duo, the SOMANET Servo Node 50 Duo EtherCAT controls and drives two permanent magnet synchronous motor (PMSM, BLDC) up to 50 Watt nominal power and can be also be used to drive three brushed DC motors of the same wattage.
SOMANET Servo Nodes: Meet the most compact and flexible embedded EtherCAT Servo Drives.- Number of brushless / brushed DC motors : 2 / 2
- Supply voltage nominal : 12-48 V DC
- Rated input current / phase current : 2.5A / 3.5A (RMS)
- Maximum output power : 50 W
- On-board voltage regulator : 5 V DC, ±10V (Node supply)
- Number of current sensors : 3 (Shunt)/Motor
- Position feedback sensor support (4 ports) : 2 x Hall, 2 x Incremental Encoder (ABIQ) + BiSS-C Absolute (Configurable)
- Analog inputs : 4 inputs Diff/Single (+Active filters), ±5V, 0~10V, 0~5V
- Digital inputs/outputs : 4 × GPIO / SPI / I²C
Somanet Encoders
- High-resolution magnetic encoders for position sensing in robotic motion control applications.
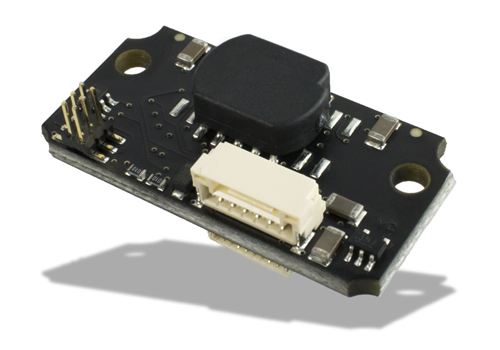
SOMANET Sense REM 14
-
Synapticon’s encoder series feature high-resolution magnetic sensors, dramatically reducing complexity and cost of robotic motion control position sensing solutions.
The REM 14 is a low-cost magnetic rotary encoder for applications without multi-turn requirements. A magnetic hall effect-based sensor combined with an N/S magnet mounted on the rotating shaft serves as the main source of angle information. The single-turn position is absolute and low-latency, so it is well suited both for motor commutation and positioning applications. The sensor comes with on-board signal processing, providing signal filtering functions and calibration routines. Its working principle is robust and widely resistant to external magnetic fields.- Single-turn absolute position sensing : YES
- Multi-turn absolute position sensing : NO
- Single turn resolution : 14 bit
- Update frequency : 14 kHz
- Communication protocol : SPI, emulated QEI, emulated Hall
- Operation Voltage : 5V DC
SOMANET Sense REM 16 MT
-
Synapticon’s encoder series feature high-resolution magnetic sensors, dramatically reducing complexity and cost of robotic motion control position sensing solutions.
The REM 16MT multi-turn encoder features energy harvesting technology for battery-free multi-turn functionality. A magnetic hall effect-based sensor combined with an N/S magnet mounted on the rotating shaft serves as the main source of angle information. The single-turn position is absolute, low-latency and timestamped, so it is well suited both for motor commutation and positioning applications. The sensor comes with on-board signal processing, providing signal filtering functions and calibration routines. Its working principle is robust and widely resistant to external magnetic fields.- Single-turn absolute position sensing : YES
- Multi-turn absolute position sensing : YES
- Single turn resolution : 65535 absolute positions per revolution (16 bit)
- Multi turn resolution : 4096 revolutions (12 bit)
- Update frequency : 14 kHz
- Communication protocol : Proprietary over SPI
- Overall latency (incl. SPI communication) : < 70 µs
- Operation Voltage : 5V DC
Somanet Safe Motion Modules
System Kits
- System Kits contain SOMANET modules for one or more axes as well as all required accessories, such as cables.
SOMANET Evaluation Kit Drive 1000 EtherCAT
-
This System Kit serves for the evaluation of SOMANET for Servo Drives. It combines an assembled and industry-grade tested SOMANET Servo Node featuring Com EtherCAT, Core C2X and Drive 1000 and all required accessories. This Kit allows you to test SOMANET with permanent magnet synchronous motors (PMSM/BLDC) of various sizes up to 1000 W (48V/20A) and integrate them as slaves in your EtherCAT system.
Please note this Kit is not for multi-axis setups or volume purchases. Refer to SOMANET Servo Nodes to purchase quantities larger than 1.
SOMANET Servo Nodes: Meet the most compact and flexible embedded EtherCAT Servo Drives.- Number of PMSM (BLDC) / brushed DC motors : 1 / 2
- Supply voltage nominal / max : 12 - 48 / 55 V DC
- Rated input current / phase current : 22 A / 32 A RMS
- Maximum phase current : Software control: 40A; Hardware protection: 53A (> 14us)
- Rated continuous output power : 1000 W
- Efficiency : 98%
- Position feedback sensor support (2 ports) : Hall, Incremental Encoder (QEI, ABI, ABC), BiSS-C, SSI, SPI
- Analog inputs (auxiliary) : 4 × configurable (0-5 V, 0-10 V, 0-20 V, ±5 V, ±10 V)
- Digital inputs : 6 × GPIO / SPI / I²C
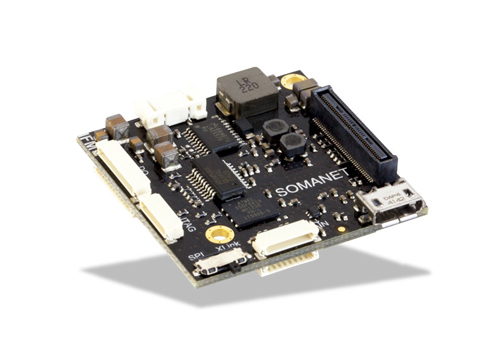
Core Modules
- Core modules are the heart of a SOMANET stack, as they carry the SOMANET SoC that runs firmware and application.
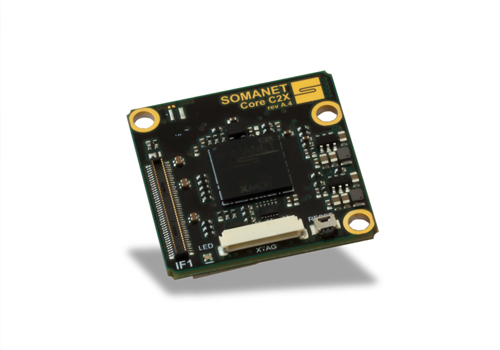
SOMANET Core C2X
-
Core modules are the heart of every SOMANET node. The SOMANET Core C2X module features one dual-core SOMANET C4X processor, having the huge computational resources of 16 deterministic real-time hardware cores while consuming less than 1 Watt.
Integrated with the Core C2X, we can find two DX-Link ports. These two ports enable SOMANET Core modules to communicate with each other directly over their processor bus (X-Link). From a software perspective, no communication protocols are required, enabling developers to create distributed applications without needing to care for communication issues. Using SOMANET DX-Links, a distributed system can be programmed as if it was a single-board system. Requiring no additional MAC, DX-LVDS is the lowest-power consuming communication option available for SOMANET.- Number of 32-bit processor cores : 2
- Number of real-time hardware threads (total / per core) : 16 / 8
- Core clock frequency : 500 MHz
- Maximum clock frequency usable by single thread : 100 MHz
- Minimum guaranteed clock frequency per thread : 63 MHz
- Maximum inter-core bus speed : 250 Mbit/s
- Typical power consumption : 570 mW
- Distributed SRAM size : 2x 256 kByte
- Flash memory size : 16 Mbit
- Supply voltage : 5 V DC
- On-board voltage regulators : 3.3, 1.0 V DC
- Auxiliary supply option available : Yes (Molex Flexi-Mate)
- LVDX Connector type : JST SUR series 10-pin
- Debug Connector type : JST SUR series 12-pin
SOMANET Core C4X
-
Core modules are the heart of every SOMANET node. The SOMANET Core C4X module features one quad-core SOMANET C4X processor, having the huge computational resources of 16 deterministic real-time hardware cores while consuming less than 1.5 Watt.
Integrated with the Core C4X, we can find two X-Link ports. These two ports enable SOMANET Core modules to communicate with each other directly over their processor bus (X-Link). From a software perspective, no communication protocols are required, enabling developers to create distributed applications without needing to care for communication issues. Using SOMANET DX-Links, a distributed system can be programmed as if it was a single-board system. Requiring no additional MAC, DX-LVDS is the lowest-power consuming communication option available for SOMANET.- Number of 32-bit processor cores : 4
- Number of real-time hardware threads (total / per core) : 32 / 8
- Core clock frequency : 500 MHZ
- Maximum clock frequency usable by single thread : 100 MHz
- Minimum guaranteed clock frequency per thread : 63 MHz
- Maximum inter-core bus speed : 250 Mbit/s
- Typical power consumption : 1140 mW
- Distributed SRAM size : 4x 256 kByte
- Flash memory size : 16 Mbit
- Supply voltage : 5 V DC
- On-board voltage regulators : 3.3, 1.0 V DC
- Auxiliary supply option available : Yes (Molex Flexi-Mate)
- LVDX Connector type : JST SUR series 10-pin
- Debug Connector type : JST SUR series 12-pin
Communication Modules
- Communication modules equip a SOMANET stack with industrial-grade communication interfaces.

SOMANET Com EtherCAT
-
High performance and time critical systems such as traditional or collaborative robotics rely on fast communication with high user data rate.
SOMANET Com EtherCAT is a compact full-fledged EtherCAT controller with Ethernet transceivers and magnetics on-board. It features all necessary hardware to quickly integrate EtherCAT slave nodes on a network.
Use a motion control suite as master such as the IgH EtherCAT Master for Linux or TwinCAT for Windows.- Number of EtherCAT ports : 2
- FMMU’s : 8
- SYNC manager : 8
- Distributed clocks : Yes (64bits)
- DPRAM : 8 kbyte
- Configuration memory : 16 kbyte
- Interface to Core board : 16 bit
- Typical power consumption : 500 mW
- Distributed SRAM size : 4x 64 kByte
- Ethernet connectors : Molex PicoBlade 5-pin
- Ethernet magnetics on-board : Yes
- Supply voltage : 3.3 V DC*
* Provided by Core via Com connector.
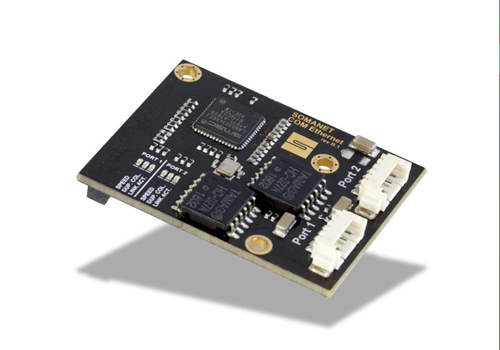
SOMANET Com Ethernet
-
SOMANET Com Ethernet is a perfect match for complex robot control systems featuring various types of sensors and actuators, for example, autonomous service robots. It offers a lightweight, easy to integrate, easy to customize and cost-effective communication solution based on standard Ethernet technology.
Choose from predefined protocols for motion and IO devices, or design your own protocol with help of the SOMANET SDK for maximum flexibility.
Ethernet communication technology is state-of-the-art for future-proof autonomous systems and is compatible with standard PC systems.- Number of Ethernet ports : 2
- Speed of the ports : 100 Mbit/s
- Interface to Core board : 2x RMI
- IEEE 1588-compliant : Yes
- Ethernet connectors : Molex PicoBlade 5-pin
- Ethernet magnetics on-board : Yes
- Clock on-board : Yes, on request
- Supply voltage : 3.3 V DC*
* Provided by Core via COM connector.
Drive Modules
- Power electronics to turn a SOMANET stack into a servo drive for DC, BLDC and PMSM motors.
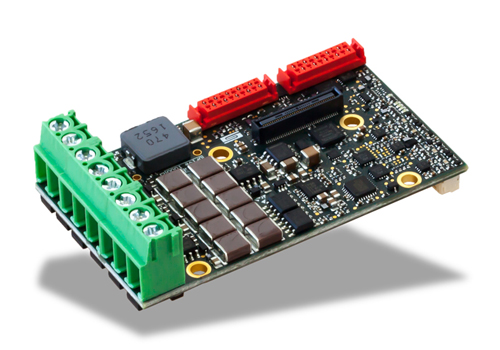
SOMANET Drive 1000
-
The SOMANET Drive 1000 drives one permanent magnet synchronous motor (PMSM, BLDC) up to 1000 Watt nominal power and can be also be used to drive two brushed DC motors of the same wattage.
SOMANET Modules: Meet the most powerful embedded robotic control system platform.- Number of PMSM (BLDC) / brushed DC motors : 1 / 2
- Supply voltage nominal / max : 12 - 48 / 55 V DC
- Rated input current / phase current : 22 A / 32 A RMS
- Maximum phase current : Software control: 40A; Hardware protection: 53A (> 14us)
- Rated continuous output power : 1000 W
- Efficiency : 98%
- Position feedback sensor support (2 ports) : Hall, Incremental Encoder (QEI, ABI, ABC), BiSS-C, SSI, SPI
- Analog inputs (auxiliary) : 4 × configurable (0-5 V, 0-10 V, 0-20 V, ±5 V, ±10 V)
- Digital inputs : 6 × GPIO / SPI / I²C

SOMANET Drive 250
-
The SOMANET Drive 250 drives one permanent magnet synchronous motor (PMSM, BLDC) up to 250 Watt nominal power and can be also be used to drive two brushed DC motors of the same wattage.
SOMANET Modules: Meet the most powerful embedded robotic control system platform.- Number of brushless / brushed DC motors : 1 / 2
- Supply voltage nominal / max : 12 - 48 / 60 V DC
- Rated input current / phase current : 5.5 A / 8 A (RMS)
- Maximum continuous output power : 250 W
- Efficiency : 98%
- Position feedback sensor support (2 ports) : Hall, Incremental Encoder (QEI, ABI, ABC), BiSS-C, SSI, SPI
- Analog inputs (auxiliary) : 4 × configurable (0-5 V, 0-10 V, 0-20 V, ±5 V, ±10 V)
- Digital inputs : 6 × GPIO / SPI / I²C
SOMANET Drive 50 Duo
-
The SOMANET Drive 50 Duo drives two permanent magnet synchronous motor (PMSM, BLDC) up to 50 Watt nominal power and can be also be used to drive three brushed DC motors of the same wattage.
SOMANET Modules: Meet the most powerful embedded robotic control system platform.- Number of brushless / brushed DC motors : 2 / 2
- Supply voltage nominal : 12-48 V DC
- Rated input current / phase current : 2.5A / 3.5A (RMS)
- Maximum output power : 50 W
- On-board voltage regulator : 5 V DC, ±10V (Node supply)
- Number of current sensors : 3 (Shunt)/Motor
- Position feedback sensor support (4 ports) : 2 x Hall, 2 x Incremental Encoder (ABIQ) + BiSS-C Absolute (Configurable)
- Analog inputs : 4 inputs Diff/Single (+Active filters), ±5V, 0~10V, 0~5V
- Digital inputs/outputs : 4 × GPIO / SPI / I²C
SOMANET Drive 400
-
The SOMANET Drive 400 drives one permanent magnet synchronous motor (PMSM, BLDC)
up to 415 Watt nominal power.
SOMANET Modules: Meet the most powerful embedded robotic control system platform.- Highly efficient model-predictive, field-oriented motor control software with advanced compensation of unwanted physical effects in drive (e.g. cogging) through SOMANET Core modules
- EtherCAT or Ethernet communication (Profinet, SERCOS III, CAN, RS-485, WiFi and Bluetooth available on demand) through SOMANET Com modules
- DS402 position, speed and torque/current control loops through SOMANET Core modules
- High-res, high-speed ADCs for precise current and voltage measurements
- Advanced protection circuitry
- Control feedback through encoders and additional sensors via Hall, QEI/ABI/ABZ (RS-422), BiSS-C (RS-422), SSI, SPI, I2C and analog interfaces
IO Modules
- Analog and digital inputs and outputs for various applications, e.g. to make a SOMANET stack act as a sensor node in your system.

SOMANET IO Digital 24V
-
For connecting digital In- and Outputs to your SOMANET system we present you our new SOMANET IO Digital 24V. It features 8 opto-isolated inputs and 8 opto-isolated outputs which are galvanically isolated from the microcontroller.
Power supply for IOs : 24 V DC
Power supply for Microcontroller : 7 - 70 V (max)
Typical supply for Microcontroller : 24 V or 48 V DC
24 V digital inputs : 8
24 V digital outputs : 8

SOMANET IO Digital TTL
- Digital IO module featuring inputs and outputs on TTL voltage level (3.3/5V), required by several embedded control system applications. Through software running on SOMANET Core modules, this module enables to flexibly configure a broad range and number of interfaces, such as SPI or I2C.

SOMANET IO Mixed Analog/Digital
-
IO module for robotic end effector interface applications, featuring analog inputs and digital inputs/outputs, typically required at robotic wrists to connect grippers and other peripheral components.
Through SOMANET Com and Core modules, these interfaces become accessible on the same bus that is used for the servo drives in a robotic arm, e.g. EtherCAT.
Accessories
- All the collateral parts needed to build and wire up a SOMANET-based system.
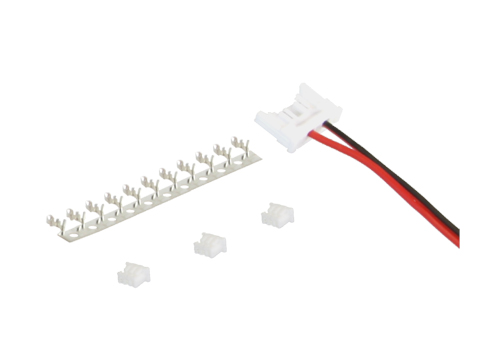
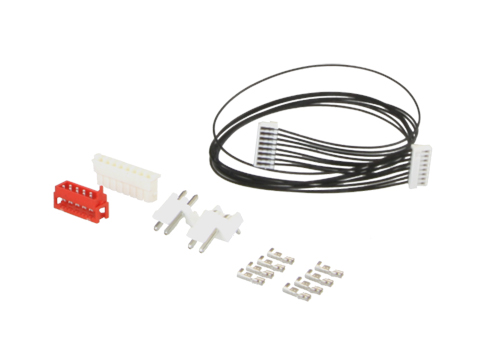
Com Serial Connector Kit
- Includes all required crimp connector housings and crimp contacts and a LIN power suppy cable for a SOMANET Com Serial module.

Core Aux Cable
- Two-wire open end to 2 pin Molex FlexiMate cable, 2m. Use this to supply a Core module with 5V independent of a Drive or IO module, e.g. to keep the Core module running while the Drive/IO module is powered off.
Drive 100 Connector Kit
- Includes all required crimp connector housings and crimp contacts for a Drive 100 module and a GPIO cable.
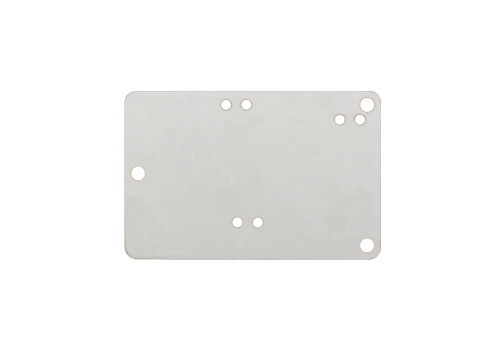
Drive 100/300 Mounting Plate
- Securely mount Drive 100 and 300-based SOMANET Nodes. Supports heat dissipation.

Drive 300 Connector Kit
- Includes all required crimp connector housings and crimp contacts for a Drive 300 module.

Drive 50/100/300 Power Cable
- Two wire open end to JST connector, 2m. Use this cable to supply a Drive 50 Duo, Drive 100 or Drive 300.

Ethernet Cable (Master to Node)
- RJ45 to 5 pin Molex PicoBlade STP cable, 2m length. Use this to connect your Ethernet or EtherCAT master PC to SOMANET Com Ethernet or SOMANET Com EtherCAT modules.

Ethernet Cable (Node to Node)
-
5 pin Molex PicoBlade to 5 pin Molex PicoBlade, STP cable. Use this to build a chain of SOMANET Com EtherCAT or SOMANET Com Ethernet based Nodes.
length
0.2m, 0.5m, 1m, 2m

IO Cable JST SUR
- 8 pin JST SUR to 8 pin JST SUR, discrete wires, 0.2m. Use this cable to hook sensors and other devices to your SOMANET Node via their analog or digital interface. Make sure to check for connector compatibility, some Drive/IO modules use different IO connectors.

LVDS DX Cable
-
10 pin JST SUR to 10 pin JST SUR, STP cable. Use this to scale a SOMANET system via Synapticon DX interface. Used to prototype many-core systems that shall later be consolidated into custom designs with one or several SOMANET SoCs.
length
0.2m, 0.5m, 1m, 2m
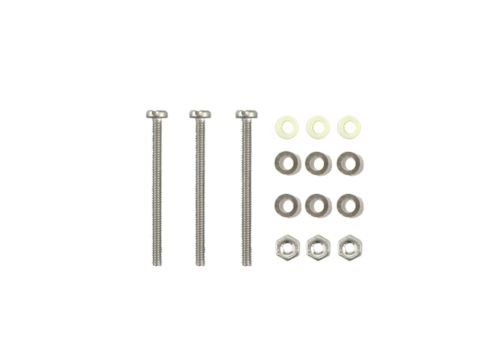
Node Mounting Kit
- For assembling any SOMANET Node. Contains standard 4mm metal spacers for modules and the white 3,5mm spacers for C22 Debug Adapter. Not required for modules with soldered spacer domes (sold from 2018).
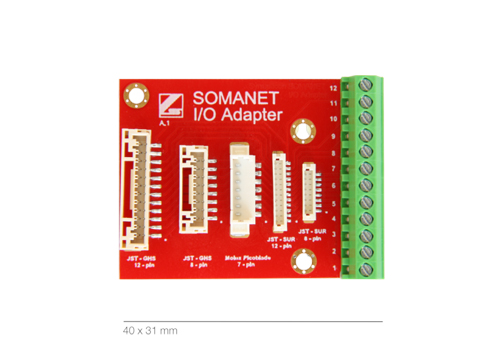
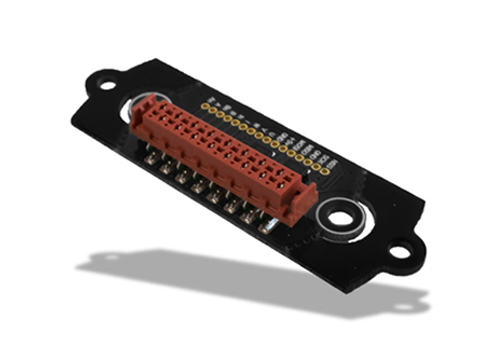
SOMANET Connector Adapter
-
Simplified access I/O to any SOMANET device. Converts JST GHS 12-pin, JST GHS 8-pin, Molex PicoBlade 7-pin, JST SUR 12-pin and JST SUR 8-pin to screw terminals.
Dimensions 40 x 31 x 18 mm

SOMANET Debug Adaptor
- For JTAG/XTAG interface. Required for low-level programming and debugging of software running on SOMANET Core modules. Comes combined with the necessary cable to connect to the Core module.
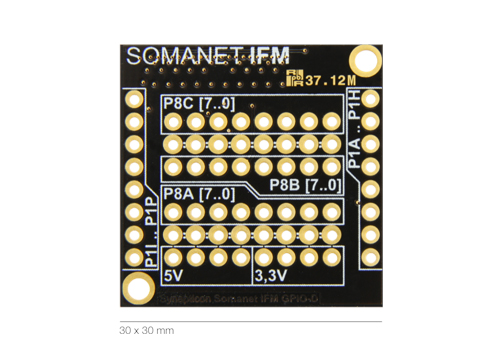
SOMANET Proto Board Kit
- Gives direct access to SOMANET Core device IOs through their Com and Drive/IO interfaces. All 16 available single-bit IO can be used to directly connect various digital devices, via PWM or through communication protocols like SPI, I²C or UART. Kit consists of two 40 IO boards.

USB to RS-485 Adaptor
- The USB-RS485-PCB is a USB to RS485 level serial UART converter PCB incorporating FTDI’s FT232RQ USB to Serial UART interface IC device which handles all the USB signalling and protocols. The PCB provides a fast, simple way to connect devices with a RS485 interface to USB.

XMOS xTAG3 Debug Device
- XMOS xTAG3 debug device is required in conjunction with SOMANET Programming Adaptor to develop and debug software running on SOMANET Core modules.
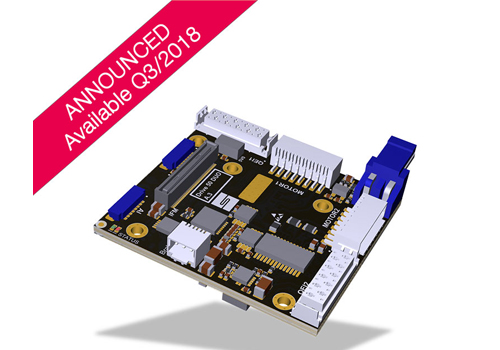
Somanet SoCs
- SOMANET SoCs are powerful all-configurable industrial motion control and IO processors, based on xCore and ARM architecture.
SOMANET SoC C2X
-
Custom configurable control & communication system-on-chip with 16 xCore cores, for industrial components and consumer product applications. Choose from DC and PMSM motor & motion control Soft IP Blocks to design your SoC. Flexibly configure industrial Ethernet interfaces such as EtherCAT, ProfiNET or CAN and peripheral interfaces through RS-485, SPI, I²C or PWM.
- xCores : 16 (32bit RISC)
- ARM Cores : 0
- Distributed RAM : 512 kB
- Internal Flash : 2 MB
- Clock Blocks / Timers : 6/10
- Number of DIO : 128
- Package : 236-pin FBGA
- Temperature range : -40°C to 85°C
SOMANET SoC C4X
-
Custom configurable control & communication system-on-chip with 16 xCore cores, for industrial components and consumer product applications. Choose from DC and PMSM motor & motion control Soft IP Blocks to design your SoC. Flexibly configure industrial Ethernet interfaces such as EtherCAT, ProfiNET or CAN and peripheral interfaces through RS-485, SPI, I²C or PWM.
- xCores : 32 (32bit RISC)
- ARM Cores : 0
- Distributed RAM : 1024 kB
- Internal Flash : 2 MB
- Clock Blocks / Timers : 6/10
- Number of DIO : 256
- Package : 374-pin FBGA
- Temperature range : -40°C to 85°C

SOMANET SoC CA1X
-
Custom configurable control & communication system-on-chip with 1 ARM core and 7 xCore cores, for industrial components and consumer product applications. Choose from DC and PMSM motor & motion control Soft IP Blocks to design your SoC. Flexibly configure industrial Ethernet interfaces such as EtherCAT, ProfiNET or CAN and peripheral interfaces through RS-485, SPI, I²C or PWM.
- xCores : 7 (32bit real-time RISC)
- ARM Cores : 1 (Cortex M3)
- Distributed RAM : 64 kB
- Internal Flash : 1 MB
- Clock Blocks/Timers : 6/10
- Number of DIOs : 110
- Integrated Analog : ADC, DAC
- Package : 265-pin FBGA
- Temperature Range : -40°C to 85°C
Legacy Products
- Please note that this category contains products which are under long term support or which are discontinued. Products under long term support can be still purchased in any quantity by customers who previously purchased them and who are manufacturing end-products based on these Synapticon products. Discontinued products are not produced anymore. Please find each product‘s status on the individual product page.
Com Serial Connector Kit
- Includes all required crimp connector housings and crimp contacts and a LIN power suppy cable for a SOMANET Com Serial module.
Drive 100 Connector Kit
- Includes all required crimp connector housings and crimp contacts for a Drive 100 module and a GPIO cable.
Drive 100/300 Mounting Plate
- Securely mount Drive 100 and 300-based SOMANET Nodes. Supports heat dissipation.

Drive 300 Connector Kit
- Includes all required crimp connector housings and crimp contacts for a Drive 300 module.
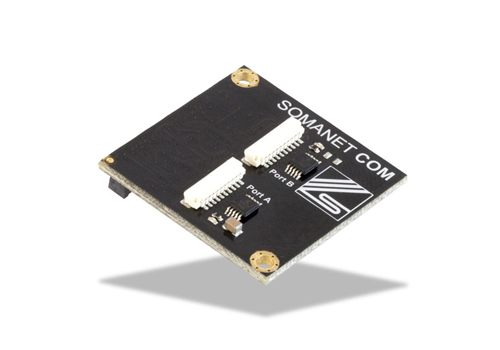
SOMANET Com DX
-
Scale your system while prototyping via the high-speed DX processor-bus. Connected via processor-bus, your nodes can be programmed as a single node, so inter-node communication becomes inter-process communication. Software developed for a multi-node DX network can alter be seamlessly ported to a single chip in your custom design.
- Max transmission speed RX/TX : 100 Mbit/s
- XMOS X-Link type supported : 2-wire
- Cable connector type : Molex Pico-Blade 9-pin
- Auto Com/IFM detection : yes
- Suitable as IFM : yes
- Max node-to-node distance : ~ 10 m
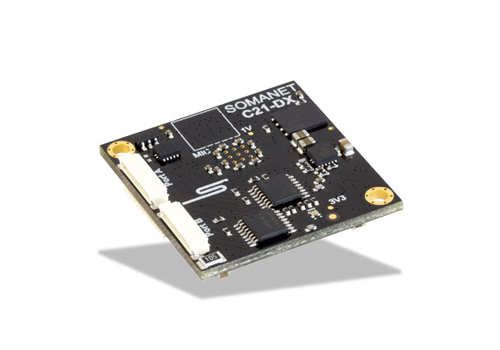
SOMANET Core C21 DX
-
Core modules are the heart of every SOMANET node. The SOMANET Core C21-DX module features one dual-core XMOS XS1-L16 processor, having the huge computational resources of 16 deterministic real-time hardware cores while consuming less than 1 Watt.
- Number of 32-bit processor cores : 2
- Number of real-time hardware threads (total / per core) : 16 / 8
- Core clock frequency : 500 MHZ
- Maximum clock frequency usable by single thread : 125 MHz
- Minimum guaranteed clock frequency per thread : 62,5 MHz
- Maximum inter-core bus speed : 244 Mbit/s
- Typical power consumption : 350 mW
- Distributed SRAM size : 2x 64 kByte
- Flash memory size : 4 Mbit
- Supply voltage : 5 V DC
- On-board voltage regulators : 3.3, 1.0 V DC
- Auxiliary supply option available : Yes (Molex Flexi-Mate)
- LVDX Connector type : JST SUR series 10-pin
- Debug Connector type : JST SUR series 12-pin

SOMANET Core C22
-
Core modules are the heart of every SOMANET node. The C22 Core module features 2 interconnected dual-core XMOS XS1-L16-128 processors. Having the huge computational resources of 32 deterministic real-time hardware threads, it is used in system positions where a plus of computational resources is required. This is the case where network type link interfaces shall be added to the system or where a majority of application software shall be run, such as inverse kinematics for a mechanical subsystem. This is usually required at the trunk of a Composite SOMANET Node.
- Number of 32-bit processor cores : 4
- Number of real-time hardware threads (total / per core) : 32 / 8
- Core clock frequency : 500 MHZ
- Million instructions per second : 1000 MIPS
- Maximum clock frequency usable by single thread : 125 MHz
- Minimum guaranteed clock frequency per thread : 62,5 MHz
- Maximum inter-core bus speed : 244 Mbit/s
- Typical power consumption : 700 mW
- Distributed SRAM size : 4x 64 kByte
- Flash memory size : 4 Mbit
- Supply voltage : 5 V DC
- On-board voltage regulators : 3.3, 1.0 V DC
- Auxiliary supply option available : Yes (Molex Flexi-Mate)

SOMANET Drive 100
-
The SOMANET Drive 100 module has a focus on driving permanent magnet motors (BLDC, PMSM) up to 100 Watt nominal power and can be also be used to drive brushed DC motors as well as stepper motors of the same size.
- Number of brushless / brushed DC motors : 1 / 1
- Supply voltage nominal / max : 8 - 24 / 30 V DC
- Rated input current / phase current : 5 A / 15 A (RMS)
- Maximum output power : 120 W
- Efficiency : 98%
- Position feedback sensor support (2 ports) : Hall, Incremental Encoder (ABI), BiSS-C
- Analog inputs (auxiliary) : 2 × single-ended (0-4V)
- Digital inputs : 4 × GPIO / SPI / I²C
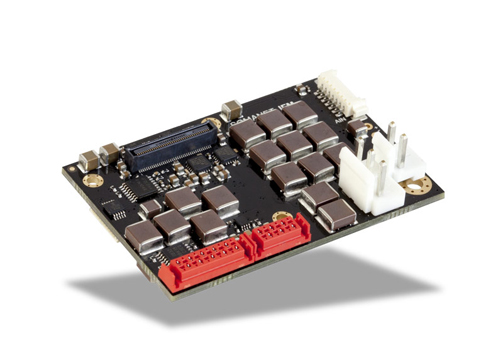
SOMANET Drive 300
-
The SOMANET Drive 300 module has a focus on driving permanent magnet motors (BLDC, PMSM) up to 360 Watt nominal power and can be also be used to drive brushed DC motors as well as stepper motors of the same size.
- Number of brushless / brushed DC motors : 1 / 1
- Supply voltage nominal : 12-48 V DC
- Rated input current / phase current : 20 A / ??? A (RMS)
- Maximum output power : 360 W
- On-board voltage regulator : 5 V DC (Node supply)
- Number of current sensors : 2 (Hall-based)
- PWM feed interface : single or per phase
- Analog inputs : 2x 0-4V
- Digital inputs : 4 × GPIO / SPI / I²C

USB to RS-485 Adaptor
- The USB-RS485-PCB is a USB to RS485 level serial UART converter PCB incorporating FTDI’s FT232RQ USB to Serial UART interface IC device which handles all the USB signalling and protocols. The PCB provides a fast, simple way to connect devices with a RS485 interface to USB.
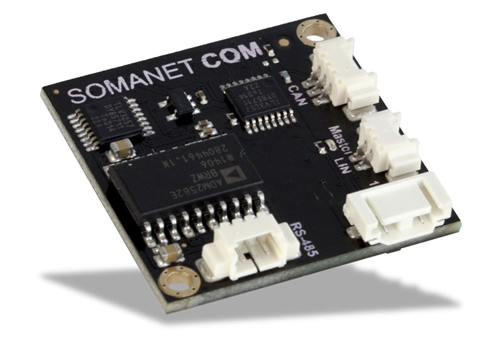
SOMANET Com Serial
-
COM Serial provides the most important serial industrial bus technologies RS-485, CAN and LIN as an option for communication within a SOMANET-based system. The module comprises transceivers, auxiliary power inputs, regulators and isolation for each bus, while protocol stacks are provided as software components that work out of the box, but also can be customized to any extent.
- Number of RS-485 / CAN / LIN Transceivers : 1 / 1 / 1
- Max RS-485 Data Rate : 16 Mbps
- Max CAN Data Rate : 1 Mbps
- Max LIN Data Rate : 20 Kbps
- RS-485 Typical Power Consumption : 495 mW
- CAN Typical Power Consumption : 128.5 mW
- LIN Typical Power Consumption : 42 mW
- Supply Voltage : 3.3 V DC (1)
- RS-485 DC-DC regulator integrated : yes
- LIN DC-DC regulator integrated : no (2)
- ESD protection for all interfaces : yes
- Interface Connector Type : Molex PicoBlade 2-pin (LIN) & 3-pin
- Operating temperature range : -30 to +85 °C
- Dimensions : 30 x 30 x 9 mm
SOMANET GPIO-A/USB
-
Local interface modules (IFMs) are the gateway to the physical world for every SOMANET Node. The variety of connectors, such as USB, analog input as well as isolated and non-isolated digital IOs, enables the module to support any external sensor that may be required by your application.
Due to the modular characteristics of SOMANET Nodes, IFM GPIO-A/USB modules can be configured with various processing units as well as communication modules. In combination with the open-source SOMANET firmware components for high-end motor control, IFM GPIO-A/USB modules are the key for sensor data acquisition purposes.- RS-485
- CAN
- LIN
ACTILINK Motion Nodes
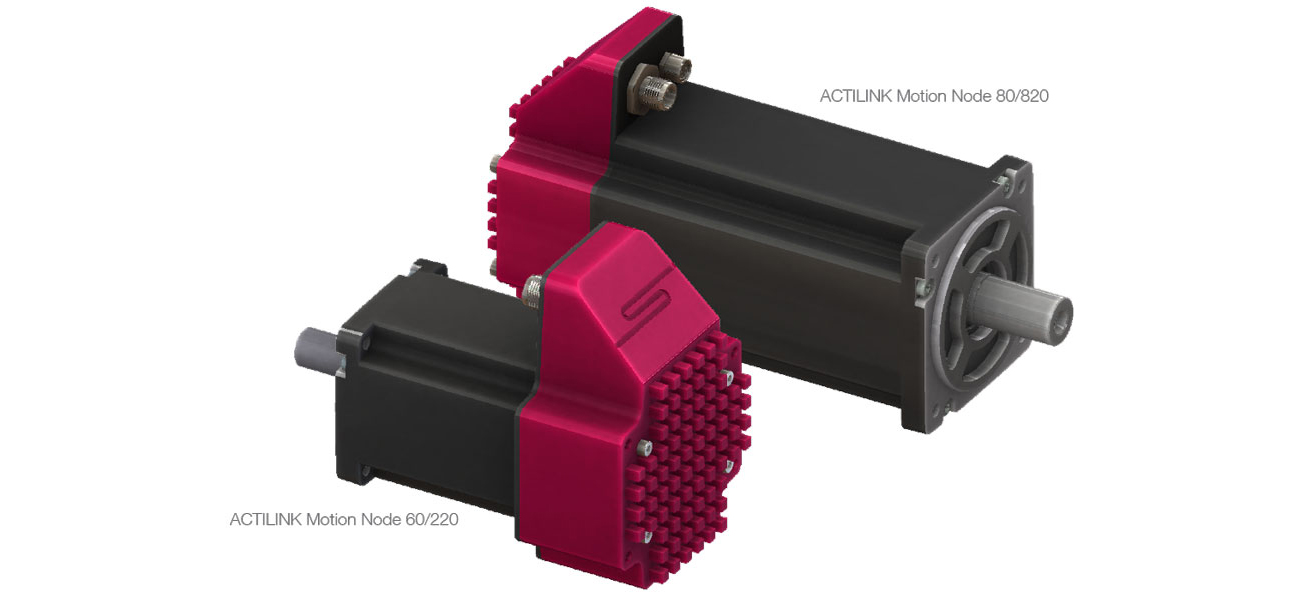
-
LEVERAGE THE POWER OF SOMANET INTO YOUR MACHINE OR AGV
Advanced motion control features from the context of robotic applications make ACTILINK an option for ambitious applications.
The motors are compatible with any EtherCAT controller that supports DS402, for example MOTORCORTEX provided by Synapticon. ACTILINK is offered as a complete system comprising the integrated motors, cabling and distribution solution, power supply and power management (brake energy handling). A new level of integration for speed of development: Meet Synapticon’s turn-key solution for robot arm axes and AGV drives. Stop spending time selecting and testing numerous combinations of gears, motors, brakes, sensors and controllers. Synapticon ACTILINK Integrated Drives combine all components needed for your motion application and remove the hurdles of engineering robotic electromechanics from scratch. ACTILINKs are made for your application: Various gear, motor, brake and sensor options are available to tailor the integrated drive to your application.