- Offer Profile
- machine types:
palletising robot PARO®, special robots, special machine building, gripping systems, packaging machines
industry sectors:
chemicals and pharmaceutical industry, food, beverages, non-food, refinery-, power plant-, medicine-, production-, packaging, casing-, measurement- and testing technology.
Robots
- Why palletising robots by roTeg?
The basic concept of the palletising-robot system PARO® is based on a modular construction. This enables an optional adaptation of the palletising space to the respective task. The spectrum ranges from default 1-site cells, not much bigger than the pallet itself, to systems with12 pallet sites.
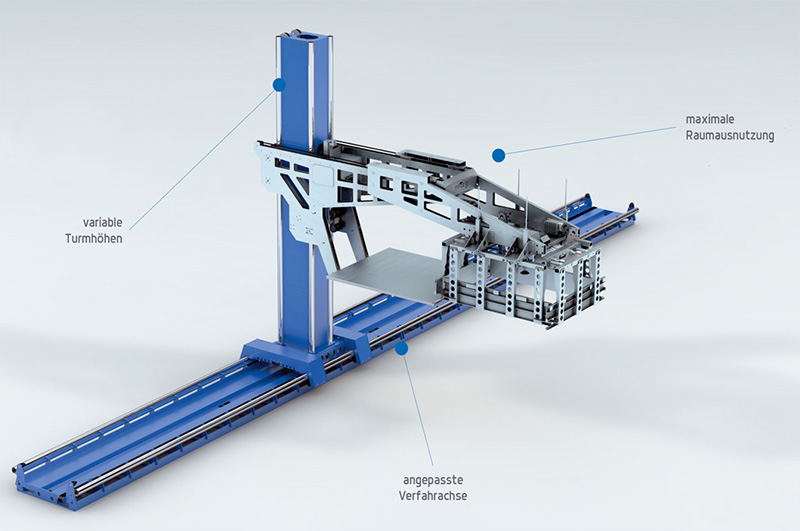
The palletising-robot system PARO® is a four-axial robot, the axes of which feature a special guiding system. Teflon-coated Vulkollan rollers run on grinded stainless-steel tubes. In practice, this system has meanwhile proved of value in many cases as a robust and maintenance free linear bearing.- robust and low maintenance machine technology
- user-friendly system control
- palletising height of 1.800 mm (optionally up to 2.600 mm)
- kinematics optimised for packages and pallets
- 1 - 12 pallet sites
- low investment costs
- low operation costs
Many industrial operation processes are already economically automated in various ranges of performance with this simple system technique.
An industrial PC with a large-surface touch screen enables a user-friendly control of the palletiser. The software is based on a robot control with CAN-Open communication with the drive system, developed on the premises of roTeg. The control units are situated in the "belly" of the palletising robot, so the cabling complexity is extremely low. 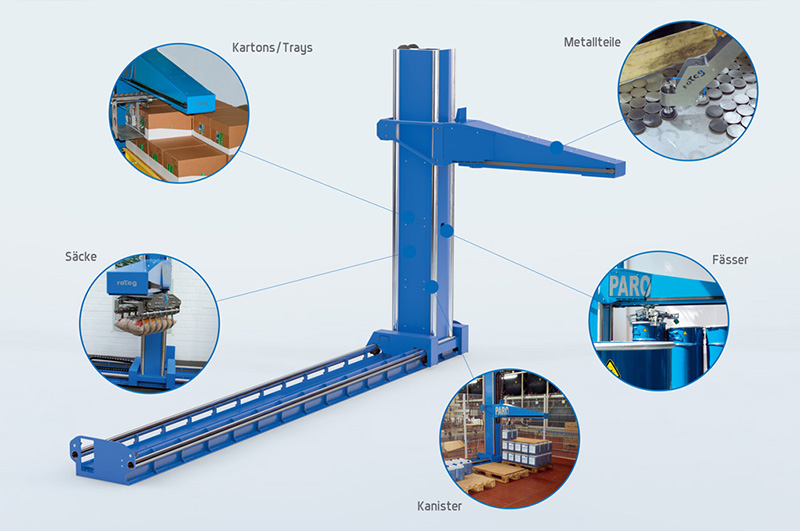
Palletising robot Type PARO
- PARO® palletising robot
- laser cut precision
- made in Germany
- robust, durable version
- four powered servo-axes
- PC control with CAN-Bus technology
modular gripping space- adjustable gripping space in all axes
- gripping space for 1 to 12 pallets selectively
- custom-made gripping height / gripping-space height
drive concept- servo-drives with resolver technique
- low-maintenance gears
- robust linear bearings
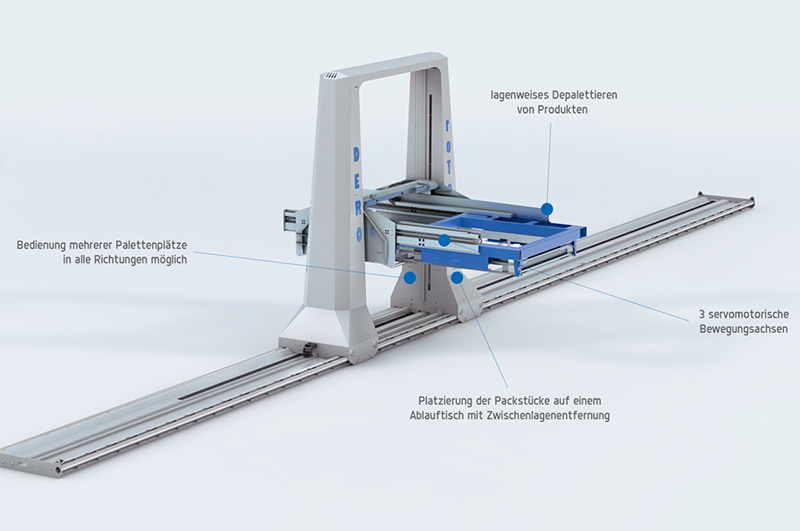
Depalletising robot type DERO 1
- DERO depalletising robot
- layerwise depalletising
- approved PARO®-Control system
- low-maintenance, robust construction
Functioning of the depalletising robot- enclosing of the upper package layer by the gripping system
- pulling of the layer onto an integrated layer sheet
- transport of the complete package layer including interlayer
- depositing of the layer onto the reception table
- removal and separate placement of the interlayer
Characteristics of the depalletiser- sparing product handling
- suitable for chemicals and pharmaceutical industry
- flexible usability for different package diameters
- variable construction for any amount of pallet sites
Depalletising robot type DERO 2
- DERO depalletising robot
- layerwise depalletising
- 3-axes robot
- approved PARO®-Control system
- low-maintenance, robust construction
Controls
-
The palletsing robots of the PARO® line are controlled via an industrial PC.
Communication between the control unit and the drive unit is effected via the approved CAN-Bus, known from the automobile industry.
This entails a minimal cabling complexity. 

PARO Control
- palletising-robot control PARO® Control
- special development for palletising
- multitasking compliant software
- integrated packing-pattern generator
- SPS software
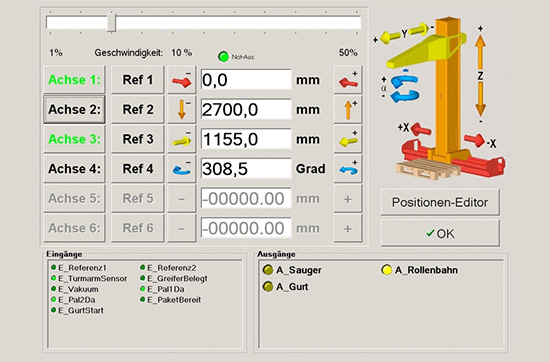
manual control- manual operation of the robot
- axes singly selectable
- step-wise progress
- or direct approach of positions
- access to the position editor
- for saving positions
further features- language-switch function
- user administration with different access rights
- direct access to the packing-pattern generator
- velocity regulator
- vacuum indicator

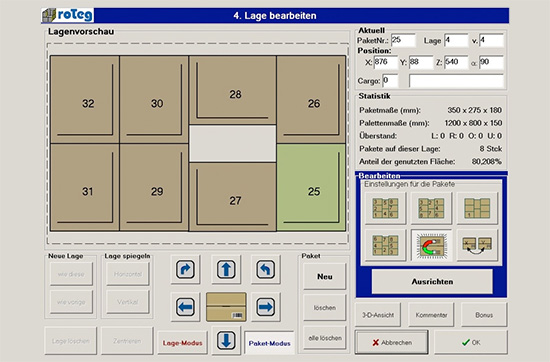
details of the packing-pattern generator
- packing-pattern
generator
- generation of optimised packing patterns
- simple, intuitive operation
- integrated in PARO® Control
- 3D-preview
pattern editing- editing the entire layer in the layer mode
- editing single packages in the package mode
- automatically calculated pattern suggestions
- comment function
- adjustment of the palletising order
- adjustment of the placement direction
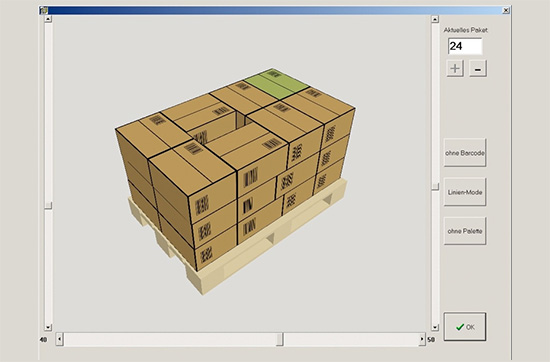
3-D-preview- freely rotatable in all directions
- display with or without pallet
- display with or without bar code
- display as line drawing or full preview
Gripping systems
- Your selection of gripping systems for palletising robots
The performance of a robot system can especially be influenced by the choice of the appropriate gripper.
The single-pick gripper is usually the right choice for low performance and unwieldy packages. The multi-pick gripper, which is able to handle two or more packages at a time, is more suitable for a palletising performance of over 500 packages per hour.
Multifunctional grippers are applied, if there is a need for additional functions, like interlayer discharge or measuring and inspection operations, besides the original pick-and-place task.
Please have a look at the subsides for examples of the specified gripping systems. Single pick

palletising robot for pails
-
- lid-sparing palletising
through triple gripping under the rim - palletising of two different bucket sizes
- with automatic gripper adjustment
accurate placement of the packages - through turnable end pieces of the gripping fingers
- handling of buckets weighing up to 30kg
- lid-sparing palletising

palletiser with clamp gripper for long goods
-
- default clamp gripper for unwieldy long goods
- spearing gripping by suspension system
- for different product measures
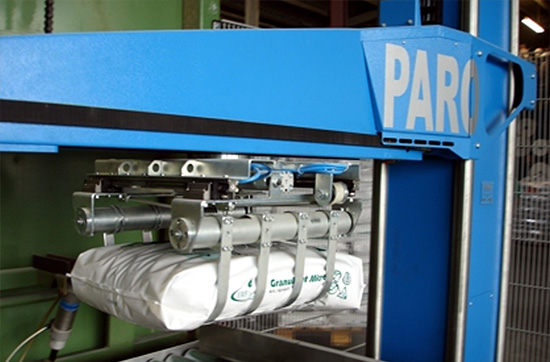
palletiser with under gripper for bagged goods
-
- default under gripper with fork elements
- extremely stable product handling irrespective
- of electrolyte level and flow inclination
- very good layer pattern generation and thus high transport stability
- suitable for all types of sacks up to 40 kg

palletiser with special gripper for long goods
-
- default clamp gripper for unwieldy long goods
- spearing gripping by suspension system
- for different product measures
Multi pick

palletiser with double-pick gripper for boxes
-
- default double pick
- for variable package sizes
- quick adjusting system
- high payload
- simple, robust and low-maintenance system

palletiser with double-pick gripper for CD covers
-
- default clamp gripper
- for delicate products
- single and double pick
- simple, robust and low-maintenance system
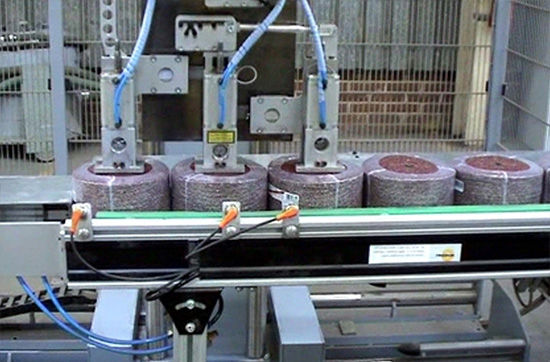
palletiser for grinding discs
-
- finger gripper for special packages (inside gripper)
- multifunctionally applicable due to its modular structure
- individual adjustments easily realisable
- simple, robust and low-maintenance system

palletiser with multi-pick gripper for trays
-
- modular structure
- simple active principle
- extremely safe handling
- simple, robust and low-maintenance system

palletiser for large pallet trays
-
- default clamp gripper
- up to 8 large trays manageable
- sparing product handling by suspension system
- tray weights of up to 40 kg

palletiser for bucket palletising
-
- default gripper for two buckets with lid
- under-gripper system with shut-keeping function
- approved and robust model

palletiser for small boxes
-
- default vacuum gripper with 2-8 suckers
- adjustable due to its modular structure
- manual adjustment after product change
- quick lock with snap-in positions
- approved and robust construction

palletiser for small display trays
-
- default inside gripper with needle elements
- spreading mechanism
- combined single and multi pick
- tray weights of up to 5 kg each

cartoniser for wine bottles
-
- default gripper for wine bottles
- modular structure for arbitrary amounts and orders of bottles
- optimal gripping through suction elements

depalletising robot with layer gripper for heavy glasses
-
- default gripper with bellows system interlayer discharge
- for heavy glasses with identical diameters
- robust and solid construction
- approved and low-maintenance technology
Multifunctional

layer-wise palletising with tray grabbing
-
- default gripper for Chep-pallet size
- layer-wise palletising with centring function
- tetrapacks into trays and packages on pallet
- robust and stable construction
approved and low-maintenance system
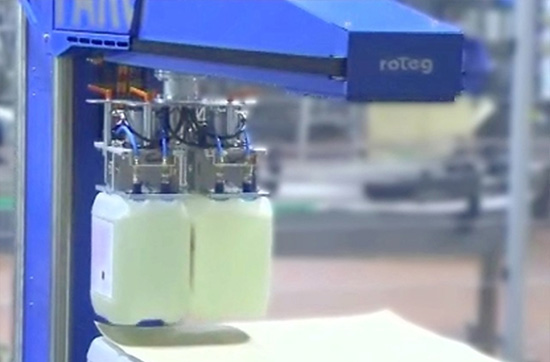
combined gripper for canisters, boxes and interlayers
-
- default double gripper
for canisters and boxes (5 to 40 kg) - interlayer handling
- robust and stable structure
- approved and low-maintenance system
- default double gripper

layer-wise depalletising of empty containers
-
- default gripper for the depalletising of light containers/bottles
- any bottle diameter
- interlayer discharge
- robust and stable structure

depalletising of wide-neck glasses
-
- default gripper for the depalletising of light glasses
- gripping system for variable glass diameters
- interlayer discharge
- robust and stable structure
- approved and low-maintenance system
Conveyor technique
Conveyors
-
An automatic change between full and empty pallets needs a smooth transition which is a crucial factor of a palletiser robots’ performance.To bring the robot cell to more efficiency, conveyor technique is used to continue the production process without a break. An intervention concerning the change of pallets is no longer necessary.The change is fully automated by the control system which is supported by integrated software named PARO – CONTROL.
The multifunctional gripper used in production process improves the efficiency. Combining different gripper tools to one adapter, economize on set-up and tool - changing time. During the production, multiple kinds of packages could be palletized without a break and even mixed up on one pallet.Conveyor types:
A good robot palletization combines a sophisticated conveyor technique and well -throught - out robot plan.
The planning of conveyor technique should come along with palletizing robot’s planning. For this reason all requirements concerning the palletizer robot could be considered right from the beginning. This procedure makes clear that there are no compromises in the end.
There is a difference in palletizing robot system:- conveyor technique to handle packaged goods, also package transport
- conveyor technique to handle pallets
The conveyor technique for packaged goods is classified in- roller conveyor
- chain conveyor
- chain mats conveyor
- belt conveyor
The selection which type of conveyor technique is finally used, depends on kind and size of the packaged goods.
The conveyor technique for pallets is classified in- roller conveyor
- chain conveyor
Roller conveyors are used for pallets with a lengthwise direction and chain conveyors are used for crosswise direction.
Both, in the conveyor technique of packaged goods and also in conveyor technique of pallets components of manipulation are used. They assist in the transporting medium for example in turns, centering and separation etc.
Machine building
- We develop, design and construct machines from the simplest technical solutions to complex machines in all areas of system and machine building.
- special robots
- production machines
- packaging machines
- casing technology for measurement and testing technology
- casing development for medical engineering