
- Offer Profile
The Robotics group is one of the best-equipped and best-connected groups in the UK. It owns the Robot Arena, a 100m2 laboratory with a 6m ceiling height for flying robots, a powered floor for long-duration experiments, and state-of-the-art 3D-motion tracking for single and multiple robots.
Robotics research at the University of Essex focuses on autonomous mobile robotics, and addresses a wide range of research questions.
These include
Sensor signal processing (laser, vision, sonar, infrared and tactile) and interpretation (e.g. for novelty detection)
Artificial intelligence, machine learning, self-organisation, emergent phenomena
Industrial applications of robotics (e.g. material handling, field robotics, human-machine interaction)
Biologically inspired robotics and machine consciousness
Research is conducted in two large research laboratories on campus, the Brooker laboratory and the new £4m Robot Arena, which was opened in 2004.
Human Centred Robotics (HCR) Human Centred Robotics (HCR) concerns with the development of various kinds of embedded systems and intelligent robots that will be used in environments coexisting with humans. These systems and robots are mobile, autonomous, interactive and intelligent, and will be useful assistants / companions for people in different ages, situations, activities and environments in order to improve the quality of life.
The Essex HCR research group is aiming at:- Promote the integration of research, design and strategy to deliver cutting-edge science and technology, which are stimulating and challenging.
- Focus on the challenge of future intelligent systems and robots, namely safe operation and flexible human-robot interaction.
- Create a promising research work environment, with a clear vision, talented researchers and fascinating projects so that we could remain creative, well-motivated and full of imagination all the time.
HCR Group believes that Human Centred Robotics offers a proving ground where the most advanced ideas and design in intelligent systems, autonomous robots and Human-robot interface could be tested and put into operation. In other words, leading technology will emerge here and later transfer to many other application areas of intelligent systems and robots such as entertainment, healthcare, sport, rescuing and service.
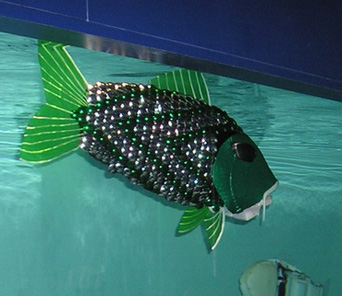
Entertainment Robotics - Robotic fish powered by Gumstix PC and PIC
- In nature, fish has astonishing swimming ability after
thousands years evolution. It is well known that the tuna swims with high
speed and high efficiency, the pike accelerates in a flash and the eel could
swim skilfully into a narrow hole. Such astonishing swimming ability
inspires us to improve the performance of aquatic man-made robotic systems,
namely Robotic Fish. Instead of the conventional rotary propeller used in
ship or underwater vehicles, the undulation movement provides the main
energy of a robotic fish. The observation on a real fish shows that this
kind of propulsion is more noiseless, effective, and manoeuvrable than the
propeller-based propulsion. The aim of our project is to design and build
autonomous robotic fishes that are able to reactive to the environment and
navigate toward the charging station. In other words, they should have the
features such as fish-swimming behaviour, autonomously navigating ability,
cartoon-like appearance that is not-existed in the real world.
This project is funded by the London Aquarium Limited, £150,000
The new carp robotic fish at Essex funded by the London Aquarium Ltd., £43,000
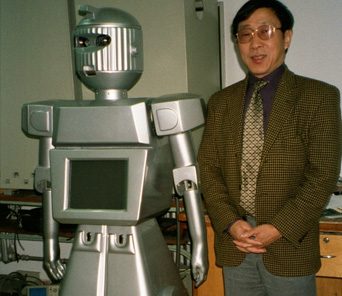
Personal and Service Robotics
- In this project, our research focuses on the
interaction between a service robot and the people within a public
environment using speech conversation as a primary communication tool. Due
to the nature of human vocal communication, it is also necessary to
implement a “body language” reading system – the ability of the service
robot to be able to tell the emotion of a person speaking, and any hand
gestures that may occur during contact. The vocal communication method
requires various technologies, such as Speech Recognition, Natural Language
Processing, Conversational Algorithms and Speech Synthesis. As the robot may
work in a noisy environment, a set of sound filtering algorithms needs to be
developed, along with a pattern recognition system for identifying phonemes
in speech. A non-precise pattern recognition system, such as a neural
network, can be employed within the system, to produce a speaker independent
recognition system.
This project is funded by EPSRC CASE and the London Aquarium Limited, £48,000.
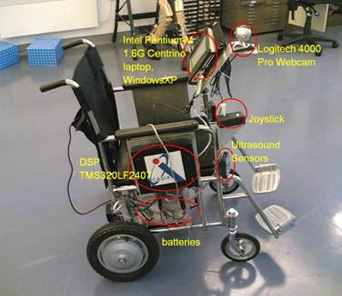
Intelligent wheelchair - RoboChair
- The current commercial wheelchairs have very limited
functions and can not fully meet the need of the disabled and elderly whose
autonomy and independence are seriously affected by decline in the function
motor and cognitive performance. At the same time, robotic technology is
currently going through a major revolution because of cheap and fast
computers and minimised sensors that are available. We are now moving closer
than ever to the deployment of intelligent wheelchairs that can assist the
elderly and disabled in their daily living activities.
The main aim of this joint project is to explore and develop the advanced technology needed for a high performance low-cost RoboChair which enables the elderly and disabled to gain necessary mobility to live independently and improve their quality of life in the society. This RoboChair should have a user-friendly man-machine interface and the ability of avoiding collision and planning a path. It will be equipped with a new vision system and a wireless communication system so that its carer or relative can monitor and tele-operate it when necessary.
The project is focused on two levers of complexity: One is an intelligent control system to achieve good control stability, fast image processing capability and autonomous navigation. Another is an interactive user interface for voice control, emotion and gesture detection, as well as a 3G mobile phone for carers or relatives to monitor and communicate remotely. The project is jointly funded by the Royal Society and the Chinese Academy of Sciences.
This project is jointed funded by the Royal Society, £17910, and the Chinese Academy of Science, £33,330, namely "Intelligent RoboChair: Improve Quality of Life for the Elderly and Disabled", 1/5/2004 - 30/4/2007
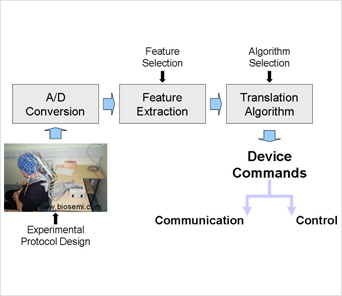
Brain actuated control
- Brain actuated control is a joint EPSRC project
carried out at Essex University and Oxford University. This project aims to
develop a novel adaptive and asynchronous brain-computer interface (BCI)
system for brain-actuated control of intelligent systems and robots. Recent
advances in science and technology have shed light on the possibility of
fusing human's brain with intelligent machines to carry out challenging
tasks that the state of the art autonomous machines cannot undertake. BCI is
one of the key technologies to make this possible. A BCI system detects and
analyses brain waves, e.g., electroencephalography (EEG) signals, in order
to understand a user's mental states, and then translates the mental states
into commands for communicating with and controlling computers, robots, and
other systems.
Based on our previous research in BCI and related areas, we believe that it is now very timely to develop adaptive and asynchronous BCI systems that not only have the advantages of using asynchronous protocols, such as high information transfer rate and natural operation mode, but also benefit from adaptive learning so as to improve the system's accuracy and robustness. Apart from adaptive learning, in order to achieve high accuracy and robustness, this proposed program will investigate novel effective indicators for onset detection and optimal timing schemes for asynchronous mental state classification, discover or invent new feature spaces on which it would be easier to classify EEG patterns, and develop new methods for increasing the number of control commands mapped from a limited number of mental states. The methods developed will be assessed through extensive experimentation with real-time brain-actuated control of an intelligent wheelchair and other devices.
This project is funded by EPSRC, EP/D030552/1, £261,939, 03/01/2006 – 02/01/2009.
Infrastructure Higlights


Autonomous mobile robots
for teaching and research
The Essex Robot Arena
- The Robot Arena at the University of Essex, opened in
2004, is one of the premier mobile robotics research facilities in the UK.
Through its 100 square metre powered floor, mobile robotics experiments can be conducted without interruption, facilitating research in continuous learning, unsupervised and autonomous operation of robots in "intelligent" buildings, etc. Measurement equipment such as computers, lamps, cameras etc. can also be placed anywhere in the Arena and powered directly off the floor.
Indoor Flying and Support Lab
The Robot Arena is high enough to allow experiments with indoor flying robots, and is extended through a neighbouring support lab, which allows the preparation of experiments and robot maintenance.