Navigation : EXPO21XX > AUTOMATION 21XX >
H05: Universities and Research in Robotics
> Massachusetts Institute of Technology
Massachusetts Institute of Technology

Videos
Loading the player ...
- Offer Profile
The Hatsopolous Microfluids laboratory (HML) was created within the Department of Mechanical Engineering as a center for research activities which focus on understanding the dynamics of fluid with microstructure and the emerging science of microfluidics. The HML consists of a single open-plan 6300 ft2 laboratory that houses seven active and three emeritus faculty plus over 45 students and postdoctoral researchers. A broad overview of the principal research areas of faculty members within the laboratory is summarized below: - Optical imaging of complex flows
- Rheology and dynamics of complex fluids
- Dynamics of thin films
- Flow stability
- Flow-structure interactions
- Flow in microfluidic devices and 'lab-on-a-chip' applications
- Biofluid mechanics and biorheology
- Capillary phenomena and contact line dynamics
Product Portfolio
Prof. Hosoi’s group
RoboSnail
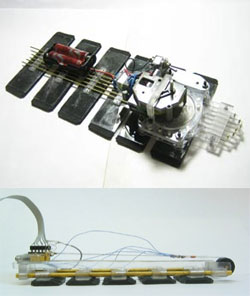
RoboSnail
- The snail may seem like a humble creature, but it turns
out walking with one foot on a trail of slime is quite a feat.
For the first time, researchers have developed a robotic snail that can do just that. Prof. Anette Hosoi at the Massachusetts Institute of Technology and her team, including graduate student Brian Chan, have developed RoboSnails I and II that move the way snails do. The battery-powered devices are larger than the average snail and don't exactly resemble the mollusks, but they crawl using two modes of locomotion that snails employ to travel across their trails of slime. The team published the results of its work in the most recent issue of the Physics of Fluid. See the videos...
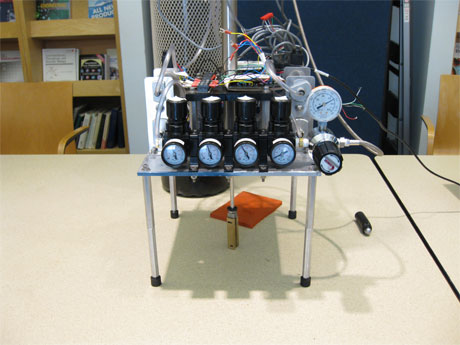
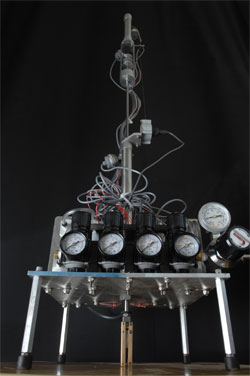
RoboClam
RoboClam - The smart anchor
- The first reduction to practice of razor clam-inspired burrowing is RoboClam This robot mimics a razor clam’s shell kinematics, can be scaled larger or smaller than real clams, and is portable for testing in marine sediments. We are using RoboClam1 to measure relationships between environmental parameters, such as substrate type and burrow depth, and performance parameters, such as burrowing velocity and energy consumption. These tests will give us the parametric understanding required to form design rules for devices that exploit razor clam digging mechanisms. RoboClam testing will also give us insight into the dominant constitutive mechanisms at play during the animal’s deformation of the substrate, which will aid in modeling robot/substrate interactions. See the videos...