Navigation : EXPO21XX > AUTOMATION 21XX >
H05: Universities and Research in Robotics
> Israel Institute of Technology
Israel Institute of Technology

- Offer Profile
- The Robotics Laboratory combines the advanced
technological capabilities and research expertise of Technion faculty, students
and facilities, with the fields of Robotics Systems.
The recently established Kahn Medical Robotics Laboratory for Research and Instruction deals with the exciting new Medical robotics field that holds great potential for significantly improving and modernizing millions of medical procedures that are carried out each year.
Product Portfolio
Projects

Swimming Micro Robot
- A micro-robot performance can be evaluated by the ratio
of it’s workspace to its own size. If the task contains mechanical
interaction, the micro-robot performance includes also the possible force
for a limited volume. The force and workspace criterions usually contradict
each other and therefore the micro-robot will be evaluated to fit a given
task.
There are micro-robots that have a mobile workspace such as walking, swimming and flying micro-robots. The evaluation of those micro-robots is based on the ratio between the useful power output and of power consumed by it. In autonomous micro-robots, other components have to be taken into account. Components as the power source (PS) and other actuators that are used for manipulation (AM).
In order to evaluate an autonomous micro robot a combined model has to be derived. The model has to include the following components:- The power source (PS) - In the model we will define what is the best power supply method for a given autonomous robot.
- The actuation (AP,AM) – The actuation converts the supplied power to the required task The task can be positioning of the robot (AP) as in micro-catheters, or manipulation of the environment (AM) as in smart pills.
- The environment model (EM) – The environment model for the robot is determined by the task of the robot. The geometrical limitations and the desired workspace are determined by the EM. From the task of the robot, one is able determining the optimal distribution of between the PS, AP and AM, i.e. an autonomous micro-robots design is task oriented.
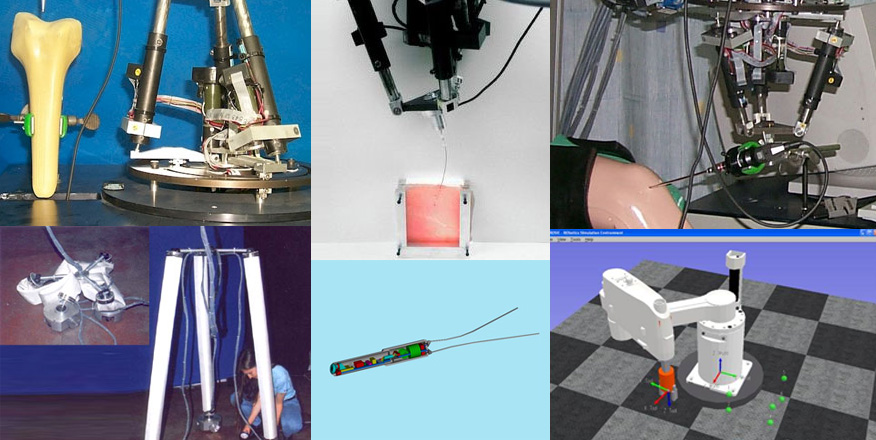
Flexible Needle Steering and Control for Percutaneous Therapies
- The current trend of the contemporary medicine is less invasiveness and
local therapy. One of the most common procedures employed in modern clinical
practice involve percutaneous insertion of needles and catheters for biopsy
and drug delivery. Percutaneous procedures involving needle insertions
include vaccinations, blood/flÂuid sampling, regional anesthesia, tissue
biopsy, catheter insertion, cryogenic ablation, electrolytic ablation,
brachytherapy, neurosurgery, deep brain stimulation, minimally invasive
surgeries and more.
These problems can be solved by introducing thin and flexible needles. Moreover, it is known that thinner needles cause less pain to the patient. On the other hand, flexible needle navigation deep inside the tissue is very complicated. The system has non-minimum phase behavior and is not intuitive to control. Path planning for flexible needle insertion and obstacles avoidance inside the body tissue is a challenging problem in mechanics and robotics. Creating an automated system that can plan and perform thin, flexible needle insertion will minimize misplacements, reduce risks, and reduce patient suffering.
Flexible needle insertion into viscoelastic tissue is formulated by a linear beam supported by virtual springs. Using this simplified model, the forward and inverse kinematics of the needle is solved analytically, providing a way for simulation and path planning in real-time. Using the inverse kinematics, the required needle basis trajectory can be computed for any desired needle tip path.
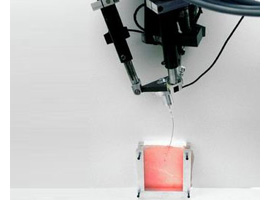
MINOSC- MicroNeuro endoscopy Of Spinal Cord
- Localization and navigation of an endoscope within a patient body is usually based on anatomical landmarks recognized by the surgeon. This technique might be more complicated, however, when a long a flexible endoscope is used. The proposed investigation presents a system that provides an image with a stabilized orientation using a miniature magnetic sensor located at the tip of a flexible endoscope. As a result, the surgeon perception of the anatomical features is enhanced enabling accurate localization of the endoscope. The system was tested in-vitro and experimental results are presented.

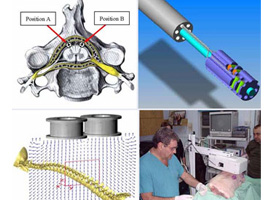
Registration of 3-D objects for Computer Integrated Surgery
- This investigation proposes an efficient registration method for
robotic-assisted surgery. Current registration techniques often need
implantation of artificial fiducial markers or digitizing devices such as
optic or magnetic sensors or laser scanners, which complicate the
registration procedure.
The registration process described here uses a surface matching technique, and thus does not require any marker implant. The following three ideas simplify the registration process. First, the robot itself is used as a digitizer eliminating the need for an extra localizer. Second, bone modeling is based on the multi-resolution technique for adaptive registration. Third, an algorithm to determine the minimal number and location of sampled points needed for registration was developed, thus easing the intra-operatively sampling process.
The proposed method was applied to Total Knee Arthroplasty (TKA) procedure, and special care was taken in adapting the method to the surgical application in hand.
The RSPR3 Mini-Parallel Robot
- This manipulator consists of three identical kinematic
chains connecting the base and the moving platform. Each chain contains a
lower link rotating around a pivot perpendicular to the base platform and
offset-placed from the center of the base. At the other end of the lower
link, a prismatic actuator is attached by a spherial joint. The upper end of
the prismatic actuator is connected to the moving platform by a revolute
joint. The axes of the revolute joints constitute an equilateral triangle in
the plane of the moving platform
The design process included singularity analysis of the architecture. This yielded a robot with a minimal number of singularities inside its workspace. One of the features of this robot is its capabilities to perform 90 degrees rotation about the vertical axis and to align one of the linear actuators with the plane of the moving platform without having parallel singularity, in which, the moving platform loses constraint (gains uncontrollable degrees of freedom).
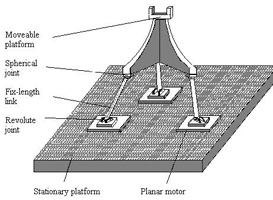
Kinematics, Dynamics and construction of a planarly actuated parallel robot
- Kinematic and dynamic analysis of a parallel robot consisting of three planarly-actuated links, is presented in this paper. Coordinated motion of three planar motors, connected to three fixed-length links, produces a six-degrees-of-freedom motion of an output link. Its extremely simple design along with much larger work volume than the commonly used parallel robots make this high performance-to-simplicity ratio robot very attractive. Experimental model verifies the unique combination of large work volume and high accuracy of this robot.

Flexible Parallel Robots

ROSI - RObotics SImulation Environment
- ROSIE is a Robotics Simulation Environment targeted at
students. The intention of the software is to provide the student with the
tools required to practice and understand the subjects learned in different
Robotics courses.
Using this software, a student can build different Robotic Arms by adding Joints and configuring their Denavit-Hartenberg parameters. ROSIE enables the user to insert Inverse Kinematics equations for the Robot and verify that the solutions are correct. ROSIE’s environment includes a Robotic Controller that emulates the Teach-Pendants found in industrial robots. The user can then manipulate the robot as if it was the real deal. The possibility of adding 3D models for each joint enables the user to virtually work with any robot, without requiring a big budget.
Other Projects
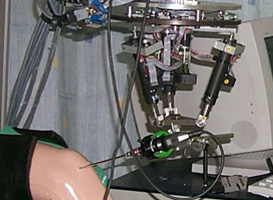
Medical Robots for Fetal Surgery
- The purpose of this research is to improve fetal therapy by introducing a micro-sized robot, less than 2 mm in diameter, into the uterus to correct or reverse effects of congenital fetal anomalies. For fetuses diagnosed with severe syndromes, surgery offers an alternative to abortion, intra-uterine death or a life with disability. While the number of patients is statistically low, fetal micro-robot research is justified by high morbidity rates, proven favorable outcomes with intervention, and educational value for extension to other procedures. The first micro-robot application will address congenital diaphragmatic hernia, a perforation in the diaphragm muscle through which abdominal viscera protrude, compressing and thereby preventing proper development of the lung. The micro-robot will execute a temporary tracheal occlusion which prevents egress of lung fluid, thereby increasing transpulmonic pressure sufficiently to push abdominal contents back into position and allow for continued pulmonary growth. The surgeon will maintain total control of robot activity through a joystick outside of the sterile field, guided by real-time images projected from an on-board camera along with 2D/3D ultrasound. Design of a micro-robot that will be immersed in the fluidic intrauterine environment provides ideal conditions to work with novel polymer actuators, unique robotic locomotion, and real-time intrauterine imaging.
EEG Based Brain-Computer Interface for Movement Control.
- The goal of this research is to build a Brain-Computer Interface that is based on recording the changes in the electrical potential map of the brain, i.e., elecencephalogram (EEG) signals, in order to perform movement control. The EEG will be recorded using surface electrodes. The signals will be processed, mapped and translated into movement commands. These movement commands will be used as input signals to a control unit that will move objects on a computer screen or will control a robotic arm.
Joint Endoscopy with Autonomous Mini Camera
- MiniCap is a miniature capsule which will be able to move autonomously in the irrigated joint fluid and to transmit images to a receiver which will be located outside of the body. The miniCup will include a miniature vision system that is able to transmit the information to a receiver out of the body. It will use an autonomous propulsion and steering system to maneuver within the irrigated joint. An external localization system will follow the location of miniCup in real-time and project it on a 3D model of the organ. In order to go through the dense joint compartments, the system size is targeted to be 3mm in diameter and 10mm in length. MiniCap introduction into the patient body will be through the same hole the surgical tool is inserted, thus further reducing the procedure invasiveness.
Investigation of Robotic Platforms for Handling of Microsystems
- Today, techniques derived from microelectronics
procedures enable to manufacture basic elements for MEMS like actuators,
joints gears etc. but there is a lack of tools to manipulate these elements
especially during development stage.
The typical handling tasks/operations for the prototyping Micro Electro Mechanical Systems which the desired microsystems have to perform are: non tactile inspection, tactile elastic testing, cleaning, bonding, gluing, mechanical measurements, electronic
measurements, optical measurements. Many of the above listed operations are considered today as problematic technology tasks.
Since, the typical dimensions of MEMS range from tens of microns to a few millimeters there is the strong demand for high accuracy and small dimensions of tools and microsystems to manipulate these elements. Therefore, miniature manipulating systems have to be developed.
Classical robots are not accurate enough to manipulate these components, also they are suffer from a scaling affect since driving forces decreases with dimensions at much faster rate than disturbances (like friction). Therefore, at some scale, friction forces become larger than inertia forces and the system is no more operative.