
- Offer Profile
- The Mechatronics in Medicine Laboratory is developing a number of robotic and mechatronic systems to aid in medical and surgical tasks. In addition, the group is also involved in basic research into the aspects of control, surgical planning and active constraints required to make these robots a reality.
Surgical Technology
- One of the main thrusts behind the MIM’s current research centres on development of advanced technologies for surgery. Of particular interest to the group are Computer and Robotic Assisted Orthopaedic Surgery (CAOS) and micro-neurosurgery, both of which benefit from over two decades of pioneering research in the field. (Dr Ferdinando Rodriguez y Baena)
Training systems
Knee Arthroscopy Training System
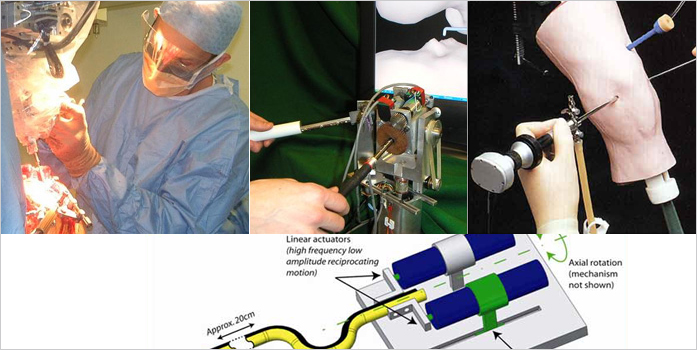
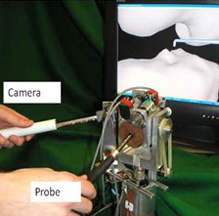
- A proprietary haptic system was developed to give
surgeons the sense of touch in a virtual reality simulation of knee
arthroscopy surgery. During real diagnostic knee arthroscopy, the surgeon
operates inside the knee with long tools (an endoscope and a hooked probe)
that pass through keyholes in the skin. The surgeon uses visual and haptic
(touch) feedback to diagnose problems in the knee.
In the virtual reality simulation, a haptic device is used to replace the real hooked probe. The virtual model of the hooked probe moves when the haptic device is moved. When the virtual model of the hooked probe contacts a virtual bone model, the haptic device physically generates a reaction force through motor torque. This system allows surgeons to practice diagnosis tasks on a realistic virtual patient before examining a real patient.
We developed our own haptic device, based on specifications observed and measured during real knee arthroscopy. Furthermore, we developed a special purpose haptic rendering algorithm, to faithfully recreate the touch sensations from contact anywhere along the virtual model of the hooked probe. This allows the user, for example, to hook and pull on virtual surfaces in the simulation. 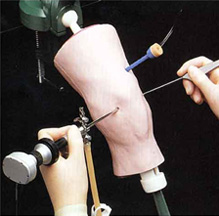
- Standard Knee Arthroscopy Training
- The OrthoForce Haptic Device
Computer-based planning
Orthopaedic Planning and Assessment
-
Computer-assisted fracture reduction planning
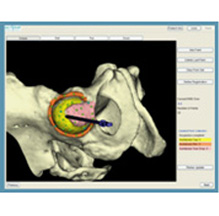
Bone fractures may require surgical management. Specific types of fracture, particularly those of the acetabulum, present a technical challenge to the surgeon, owing to very limited access to the injured bone. We are investigating methods to perform the surgery minimally invasively, which has the advantages of reduced blood loss, decreased infection risk and shorter hospital stay.
We are currently focussing on the pre-operative planning of these operations. We are developing techniques to plan the reduction using statistical shape models. 
- Conventional Acetabular Fracture Reduction I

- Conventional Acetabular Fracture Reduction II
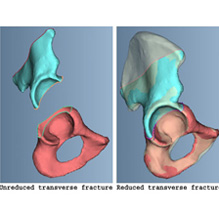
- Acetabular Fracture Reduction using a statistical shape model
Post-operative assessment
-
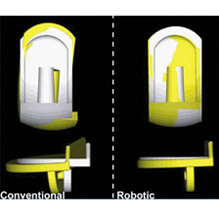
- Assessment of the quality of implantation of joint replacements.
- Conventional methods perform poorly when compared to new robotic and navigated techniques
- Anatomical registration
Route Planner for Minimally Invasive Neurosurgery
-
The Route Planner for the brain, which was awarded a Proof of Concept Grant
in 2007, helps to capitalise on soft tissue navigation with a flexible probe
for minimally invasive neurosurgery, thereby achieving optimum placement
accuracy at minimum risk for patients. It generates a route through a
digital brain atlas which includes detailed brain anatomical structures and
a risk mapping database. An optimised surgical plan is created by providing
the following parameters: entry site, traverse pathway, target location and
constraints given by the geometric features of the neuro-probe to be
employed.
The risk-related brain structure is developed by considering, for the specified area, both the neural function in healthy subjects and the severity of dysfunctions related to the potential local damage. The brain “zones” are sorted into 6 groups according to the neurological prognosis that would be caused following damage during insertion, from “accessible” to “avoid” through “common”, “careful”, “warning” and “dangerous”.
Robot-assisted surgery
Biomimetic Flexible and Steerable Probe for Neurosurgery
- Medical Motivation
The current trend in medical intervention favors a less invasive approach with a tendency to localized therapy. Common procedures employed in modern clinical practice involve percutaneous insertion of needles and catheters for biopsy and drug delivery, blood/fluid sampling, catheter insertion, cryogenic or electrolytic ablation, brachytherapy, deep brain stimulation, diagnostic imaging, and a number of minimally invasive surgical proceduresThe Biological Inspiration
Nature is often a good inspiration for demanding engineering tasks and, particularly, a novel smart actuator has being inspired by the penetration strategy developed by ovipositing wasps: these insects can penetrate different kind of tissues (wood, leaves, host larvae) to lay their eggs. The ovipositor of the wood wasp, Sirex noctilio, for example, has the main function of delivering eggs through a hollow tube along its length. Its tip is about 0.2~0.3mm in diameter and can drill to a depth of up to 20mm into the sapwood of a tree. The applicability of the wood wasp’s anatomy resides in the mechanism of drilling, which does not require rotary motion or impaction.
The ovipositor is made of two interlocked halves, or “valves,” rather like the zip on a “zip-lock” polyethylene bag, which slide relative to each other. Backward pointing teeth (numbered in Fig. 1b) hold on to the substrate, resisting pulling forces. The pull on one of the valves provides stabilization along the length of the ovipositor to prevent buckling so that the other valve can be pushed with an equal and opposite force, to produce a net force near zero. The reciprocating motion of the two valves drives the ovipositor’s penetration, as one valve is pushed deeper into the wood stabilized by tension generated in the other valve. Since there is no net force in the ovipositor assembly, there are no stability problems and there is no theoretical limit on its length.
J. F. V. Vincent and M. J. King. The mechanism of drilling by wood wasp ovipositors. Biomimetics, 3(4):187–201, 1995.The Project
A biomimetic flexible steerable probe is currently being developed at Imperial College London: the aim is the access of deep brain areas with minimum damage in order to accurately place minimally invasive instrumentation (catheters, electrodes for deep brain stimulation), to perform clinical analysis and diagnosis (biopsy, sampling), localized drug delivery and micro neurosurgery.FP7 ROBOCAST, Eurpean project
ROBOCAST is a 3 year European project (Framework 7 funding) to develop an integrated neurosurgical suite. Robotic assistance, smart sensors, augmented reality and an intelligent user interface are among the deliverables of the project. Imperial’s involvement in ROBOCAST pertains to the development of the biologically inspired flexible probe for brain interventions, described above. Visit www.robocast.eu for more information.Project consortium:
Politecnico di Milano (Italy, coordinator), Azienda Ospedaliera di Verona (Italy), Università di Siena(Italy), Imperial College (UK), Prosurgics Ltd. (UK), The Hebrew University of Jerusalem (Israel), Technion – Israel Institute of Technology (Israel), Mazor Surgical Technologies Ltd (Israel), Technische Universität München (Germany), Universität Karlsruhe (TH) (Germany), CF consulting S.r.l. (Italy)
Selection of past projects
The Acrobot
-
Knee replacement surgery requires good accuracy to replace bone at the knee
with a prosthesis as each part of the prosthesis has to mate well with the
bone and with each other. The Acrobot provides the surgeon with this
accuracy. While normal robots take over from the surgeon, the Acrobot works
with him by allowing him to move a cutter under force control. The robot
also constrains the surgeon to cut within safe regions and prevents damage
to surrounding tissue.
This project resulted in the formation of The Acrobot Company Limited, a spinout company to commercialise the research.Knee replacement surgery requires good accuracy to replace bone at the knee with a prosthesis as each part of the prosthesis has to mate well with the bone and with each other. The Acrobot provides the surgeon with this accuracy. While normal robots take over from the surgeon, the Acrobot works with him by allowing him to move a cutter under force control. The robot also constrains the surgeon to cut within safe regions and prevents damage to surrounding tissue.
This project resulted in the formation of The Acrobot Company Limited, a spinout company to commercialise the research. 
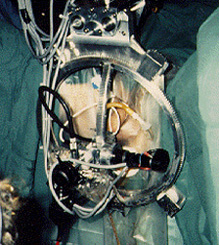
- The Acrobot in use in the operating room

- The Acrobot system showing from left to right the Acrobot robot, passive positioner and control computer

- View of Acrobot robot mounted in cradle on passive positioner
High Intensity Focused Ultrasound (HIFU)
-
Intense ultrasound can be used to treat tumours deep within the body (for
example, deep seated brain tumours). The effect of ultrasound is to head
tissue to a temperature at which it is killed, after which the dead tissue
is gradually re-absorbed into the human body and removed via natually
processes.
To perform tumour treatment effectively, ultrasound from a transducer must be focused to a small region within the tumour. This requires that the transducer is carefully designed to produce the appropriate beam profile leading to a tight focal point, and that the transducer is correctly positioned and aligned to put the focal point within the tumour.
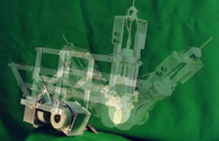
To achieve alignment of transducers, a robotic approach is being adopted, mounting transducers on a robot, with a variable dimension interface matching bag between transducer and brain to allow the focal depth within the brain to be adjusted, and to provide impedance matching, allowing good transfer of energy into the brain. A project to assess the feasibilty of a robot was undertaken - the following animation shows the robot design in three positions. A more surgically applicable robot is now under development by Selvan Pather.Intense ultrasound can be used to treat tumours deep within the body (for example, deep seated brain tumours). The effect of ultrasound is to head tissue to a temperature at which it is killed, after which the dead tissue is gradually re-absorbed into the human body and removed via natually processes.
To perform tumour treatment effectively, ultrasound from a transducer must be focused to a small region within the tumour. This requires that the transducer is carefully designed to produce the appropriate beam profile leading to a tight focal point, and that the transducer is correctly positioned and aligned to put the focal point within the tumour.
To achieve alignment of transducers, a robotic approach is being adopted, mounting transducers on a robot, with a variable dimension interface matching bag between transducer and brain to allow the focal depth within the brain to be adjusted, and to provide impedance matching, allowing good transfer of energy into the brain. A project to assess the feasibilty of a robot was undertaken - the following animation shows the robot design in three positions. A more surgically applicable robot is now under development by Selvan Pather.
TURP-TM Training systems for Endoscopic Soft Tissue Surgery
- The project dealt with the generic problem of training and monitoring
minimally invasive endoscopic soft tissue surgery by tracking tools and
tissue.
A training system for transurethral resection of the prostate (TURP) was developed as a particular concept demonstrator (hence the name TURP - Trainer/ Monitor).
The objectives of this project were:- To identify generic criteria for in vitro and in vivo computer-based endoscopic surgery training aids #
- To provide a camera-based tracking system with fixed model prostate phantom as a computer-based in vitro prostatectomy training aid
- To provide a tracking system and ultrasound measurement facility as a computer-based in vivo prostatectomy training aid.

- Overview of TURP trainer

- Computer assisted TURP trainer in use

- Resectoscope instrumented to allow tracking of its position, orientation and cutter extension
The Bloodbot
-
This project was aimed at investigating how force information gained during a
medical procedure may be used by a mechatronic device. The particular procedure
chosen was that of taking blood samples from the forearm, as this procedure is
reliant on feeling the prescence of veins and feeling the moment of breakthrough
of the needle into the vein. One of the problems when taking samples manually is
needle overshoot resulting in the needle piercing both sides of the vein
resulting in bruising. The robot can find the vein by touch, and when inserting
the needle monitors the insertion force and reacts to the elastic properties of
the vessel to prevent overshoot.
This project was aimed at investigating how force information gained during a medical procedure may be used by a mechatronic device. The particular procedure chosen was that of taking blood samples from the forearm, as this procedure is reliant on feeling the prescence of veins and feeling the moment of breakthrough of the needle into the vein. One of the problems when taking samples manually is needle overshoot resulting in the needle piercing both sides of the vein resulting in bruising. The robot can find the vein by touch, and when inserting the needle monitors the insertion force and reacts to the elastic properties of the vessel to prevent overshoot.


The Probot
-
A robot for transurethral resection of the prostate (TURP). The PROBOT is an
active robot for prostate resection. It is designed to allow a surgeon to
specify a volume within the prostate to be cut, and then automatically cut this
without further intervention from the surgeon. Ultrasound images are used to
plan the procedure.
A robot for transurethral resection of the prostate (TURP). The PROBOT is an active robot for prostate resection. It is designed to allow a surgeon to specify a volume within the prostate to be cut, and then automatically cut this without further intervention from the surgeon. Ultrasound images are used to plan the procedure.
Title
- Description
Roboscope
-
The removal of deep-seated brain tumours requires endoscopic surgery and
high precision. As part of a multi-national European project, a robot is
being developed that holds an endoscope and allows a surgeon to manipulate
it within the brain. The robot constrains motions to a specific region using
the Active Constraint principle. This project is multi-disciplinary and
involves MRI processing, ultrasound guidance, robotics and visualisation.
The removal of deep-seated brain tumours requires endoscopic surgery and high precision. As part of a multi-national European project, a robot is being developed that holds an endoscope and allows a surgeon to manipulate it within the brain. The robot constrains motions to a specific region using the Active Constraint principle. This project is multi-disciplinary and involves MRI processing, ultrasound guidance, robotics and visualisation.
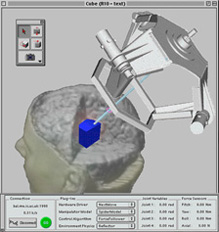
- Here is a teaser for the way the final interface will appear...
- Here is the HexaPod - a similar robot....
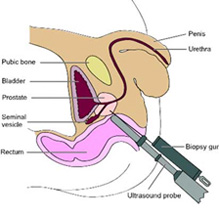
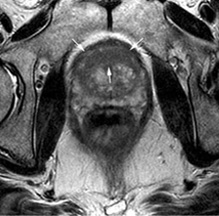
MRI-Guided Trans-Rectal Prostate Biopsy
- MRI can produce high resolution 3D images of human anatomy, making it
unrivalled for disease diagnosis. Robotic tools can target structures inside
the body using MRI images as guidance.
Diagnosis Prostate Cancer
Prostate cancer kills over 10,000 men in the UK every year. The current diagnostic procedure involves a biopsy of the prostate using ultrasound (US) image guidance. US leads to 20% false negatives. MRI can solve this problem effectively.
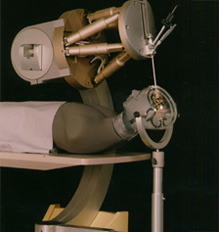
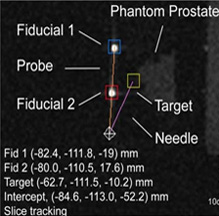
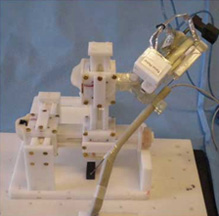
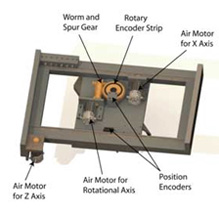
The Prostate Biopsy Robot
Images from the MRI scanner allow the surgeon to track the needle and to guide the tip into a target in the prostate. By using our Prostate Biopsy Robot, the surgeon controls the robot “remotely”, thus improving safety and accuracy. The robot can extract cells from the prostate within 2mm. 
- Robot Control Station
MRI compatible “magic angle” device for tendon disease diagnosis
- Diagnosis Tendon Disease
- Athletes prone to disease in tendons
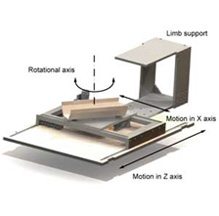
- MRI can provide an ideal imaging environment to diagnose disease early

- Our robotic system to autonomously move tendons inside the scanner can tailor examination to requirements
Haptic endoscope
- Medical technologies have undergone significant development to overcome the problems inherent in Minimally Invasive Surgery (MIS) such as inhibited manual dexterity, reduced visual information and lack of direct touch feedback to make it easier for surgeons to operate. A minimally invasive tool incorporating haptic feedback is being developed to increase the effectiveness of diagnostic procedures by providing force feedback. Magnetic Resonance Imaging (MRI) guidance is possible to allow tool localisation, however this engenders the requirement of MR compatibility on the device.