- Offer Profile
- The ULB is a multicultural
institution which has 7 faculties and a range of schools and institutes and
is, at the same time, a comprehensive university providing academic tuition
in all disciplines and study cycles.
With its three Nobel Prize winners, a Fields medal, three Wolf Prize for physics, two Marie Curie Prizes and 29% of the Francqui prizes awarded, the university is also a major research centre which is recognised by the academic community the world over.
Vibration Isolation and Damping
- Hard and soft Stewart platforms for payload isolation and steering
Vibration Isolation
- Higher precision pointing performances are required by optical payloads for
high data rate inter-satellite optical links communications, for space borne
interferometer missions instruments, and in general for telescopes pointing
applications. Sensitive payload pointing performances are adversely affected
by the mechanical vibration environment generated on board by mechanically
noisy equipment like momentum wheels, cryo-coolers, solar array drives,
fluid pumps etc.
Frequently a solution for vibration reduction consists in implementing soft passive isolation mounts (typically by means of polymeric materials or spring / damper systems). The simplicity and cost effectiveness of this approach is counterbalanced by the limited performances that can be achieved by its implementation. Indeed the efficiency of this system in the low frequency range and for low vibration levels is quite limited. Furthermore additional issues specifically related to the launch induced loads and to the space environment (need for a launch lock device, de-pointing after release, ageing effects…) may make their use less attractive.
Our research activity was therefore initially focused on active solutions. Active vibration isolation normally includes sensor components (typically for sensing displacements or accelerations or forces at critical locations), actuators (typically piezo-electric or electromagnetic), power and data processing capabilities for the control function. Among the various possibilities, the so-called Stewart Platform architecture is particularly attractive; it is an hexapod construction, where the six legs provide the required degrees of freedom to the payload. 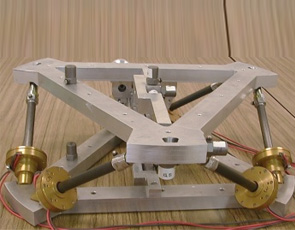
- The active vibration isolator built at the ULB (2004)
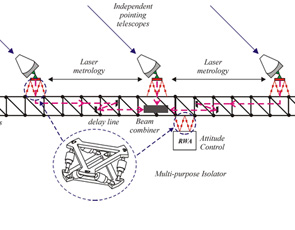
- Active isolation isolator for space interferometry
Vibration Damping
-
Stiff Hexapods
This project started in 2000; the objective consisted in building a six-degree-of-freedom generic active damping interface. The Active Damping & Steering Interface is designed to connect two arbitrary structures: it can be used as a microvibration damping device, or as a high precision pointing mechanism. It is made of six legs, in accordance with the Stewart Platform architecture; each leg consists of a linear piezoelectric actuator, a collocated force sensor and two flexible tips for the connection to the plates. The maximum axial stroke is 90µm and the maximum tilt is 4mrad. The legs of the interface are controlled in a decentralized manner with a “sky-hook” controller implemented with an Integral Force Feedback (IFF) control law. (picture on the left)
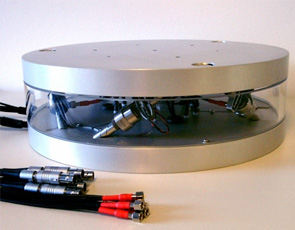
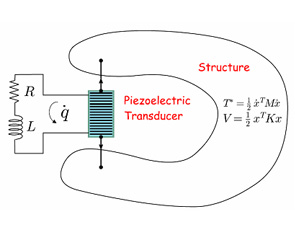
Shunt Damping
Active damping of structures with piezoelectric transducers generally implies at least a sensitive signal amplifier (for the sensor), a power amplifier (for the actuator) and an analog or digital filter (for the controller). The use of all these electronic devices may be impractical in many applications and has motivated the use of the so-called shunt circuits, in which an electrical circuit is directly connected to the piezoelectric transducer embedded in the structure. The transducer acts as an energy converter: it transforms mechanical (vibrational) energy into electrical energy, which is in turn dissipated in the shunt circuit. No separate sensor is required, and only one, generally simple electronic circuit is used. The stability of the shunted structure is guaranteed if the electric circuit is passive, i.e., if it is made of passive components such as resistors and inductors. (picture on the right)
Robotics
Walking machines
- The first machine, MAX, consists of a small,
38cm long, 1.3kg rectangular hexapod that has been build for gait studies.
Each leg has two degrees of freedom, actuated by position servo-motors, and
a contact switch in the foot. A wide variety of regular gaits have been
implemented. An algorithm for autonomous pit avoidance has been
demonstrated.
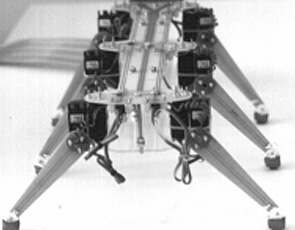
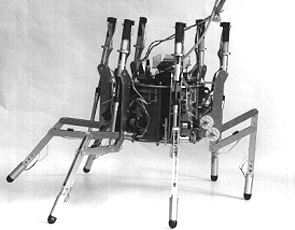
SILEX consists of a 13kg, 50cm high hexapod with hexagonal architecture. Each leg consists of a closed loop mechanical structure with three degrees of freedom provided with DC motors. The kinematics has been designed to achieve gravitational decoupling. The control architecture is decentralized: each leg has its own control board, based on a microcontroller INTEL 87C196KC, which solves the inverse Jacobian equations in real time. The six local controllers and a two channel inclinometer are onboard the robot.
A hierarchical control scheme involving 3 levels has been implemented. Level A concerns navigation and path planning; it is ensured by a human operator who prescribes the desired speed for the vehicle with a joystick (3 components). Level B includes the gait control, the attitude and altitude control and the calculation of a force distribution reference. A free gait algorithm (gait control) which allows a smooth and stable motion for an arbitrary velocity vector of the vehicle (including a rotation about the vertical axis) has been developed. The level B is implemented in a central computer (PC). Level C handles the leg trajectory and the servo control as well as the force control of the leg (active suspension). The force feedback is provided by force sensors based on straingages that are included in the feet. Level C is implemented at the leg level (6 microcontroller board).IOAN is a 1.2 kg, 40 cm long walking robot. The robot has six legs; each of them with two-degree-of-freedom. The chassis consists of three articulated bodies connected by servo-controlled universal joints equipped with torque sensors (strain gauges). This particular device produces an active suspension and improves considerably the agility of the walking vehicle, by allowing the central body to follow the ground profile. Furthermore, the vehicle can walk on both sides and can recover from roll-over thanks to the actuated universal joints which allow an autonomous transfer from one side to the other. The simplicity of the leg kinematics provides robustness and makes Ioan extremely easy to control.
- Max
- Silex

- Ioan
Pipe inspection robots
- HELI-PIPE family consist of four different types of
robots for in-pipe inspection. The robots has two parts articulated with a
universal joint. One part (the stator) is guided along the pipe by a set of
wheels moving parallel to the axis of the pipe, while the other part (the
rotor) is forced to follow an helical motion thanks to tilted wheels
rotating about the axis of the pipe. A single motor (with gear reducer
built-in) is placed between the two bodies to produce the motion (no direct
actuated wheels). All the wheels are mounted on a suspension to accommodate
for changing tube diameter and curves in the pipe. The robots are autonomous
and carries their own batteries and radio links.
D-170 is a robot for 170 mm pipe diameter with the rotor rigidly connected to the axis of the motor (placed on the stator) designed for pipes of small curvature (radius larger than 600 mm). 
- D-70/1 HELI-PIPE robot

- D-70/2 HELI-PIPE robot

- D-170 HELI-PIPE robot
Portable Arm Exoskeleton
- In many teleoperated or virtual activities with force
feedback, the use of a fully portable haptic device would increase the
easiness and performances of the command task, compared to devices linked to
the ground or a table. Applications range from robotic arm teleoperation in
severe environments (space, nuclear reactors, deep waters…). to applications
in virtual reality either in the domain of virtual training in large volumes
(such as virtual assembly) by means of immersion caves or head mounted
displays or in the domain of stroke patients rehabilitation. As the
operator does not have to be linked to a fixed base, or in environments with
obstacles and as a multi-DOF portable device allows force feedback on
several contact points, the operator is more immersed in the environment
during the manipulation.
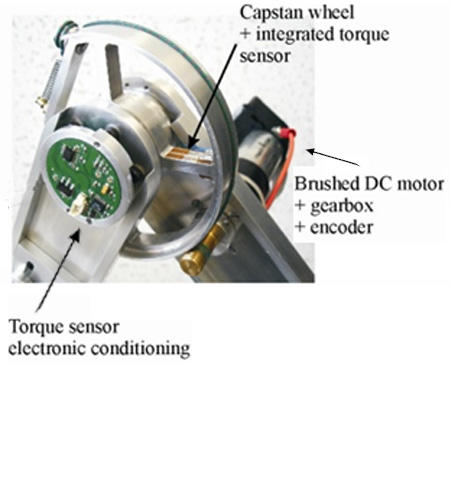
The Sensoric Arm Master (SAM) has been designed as a wearable haptic interface with a serial kinematics, isomorphic to the human arm. SAM contains 7 actuated DOF corresponding to the joints of the human arm (shoulder, elbow and wrist flexion/extension, shoulder and wrist adduction/abduction, arm and forearm pronation/supination) and 6 sliders allowing morphological adaptation between active joints and human articulations. That corresponds to a good compromise between operator immersion capabilities (maximised workspace and no singularity) and mechanical complexity. Each joint of the exoskeleton has a similar conception with a local actuator, a position and torque sensor, allowing several kinds of control strategies (impedance, admittance control). The actuation has been selected with a compact system composed of a brushed DC motor, a capstan and gearbox. 
- SAM exoskeleton
- Sam joint design
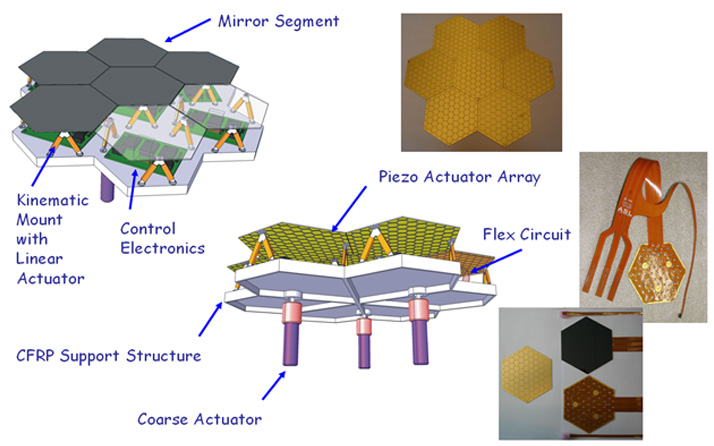
Telescopes
- Space Telescopes and Terrestrial Extremely Large Telescopes
Space Telescope
- Large light-weight telescopes in space are considered
key elements enabling future Earth observation and space science.
The first large space telescope, “Hubble”, uses a monolithic primary mirror of 2.4 m diameter. The Hubble Space Telescope primary mirror has an area density of about 180 kg/m2. This monolithic approach cannot be used for much larger telescopes due to mass and volume limitations imposed by today’s launch capabilities. Thus the current generation space telescope, the James Webb Space Telescope now under development, makes use of a segmented primary mirror of 6.5 m diameter. The segments will be folded during launch and will deploy once in orbit. The position and the alignment of the segments will be actively controlled to correct deployment and fabrication errors as well as thermal and gravity disturbances on-orbit. The area density will be below 20 kg/m2.
However, continued demand for new science and observation from space will require even larger telescopes and diameters in the order of 20 m need to be achieved. Entirely new concepts will have to be envisaged for deployable space telescopes with primary mirror area densities below 3 kg/m2.
The Active Structures Laboratory of ULB is developing a prototype of a very lightweight telescope in which the segments in addition to being positioned and oriented will also be deformable. Nanotechnology
Nanomanipulation
- Nanotechnology tries to develop new kind of materials
and tools to increase the performance of sensors, actuators, computers,… One
of the biggest challenges of this technology is the manipulation of
components with dimensions less than 100 nm and subjected to forces at
molecular level like Van der Waals, electrostatic, capillary and chemical
forces. A lot of applications can be found in several fields like
biotechnologies (ADN and protein study), data storage or material science (
nanotube or surface film characterization).
One way to achieve nanomanipulation is the use of a surface imaging tool called AFM (Atomic Force Microscope). The nanometric objects are manipulated by the AFM’s cantilever with a feedback loop on the exerted force. The displacements are done by piezoelectric actuators and the interaction forces are measured through the deflection of the cantilever.
As the dimensions are bellow the micrometer, it is impossible for an operator to observe his manipulation through an optical microscope. To achieve an effective work, an other kind of interface between the user and the nanoworld is necessary. In a teleoperated manipulation, it is composed of a 3D graphic virtual reality and a haptic device. This last device exerts scaled forces from the AFM measurement to the operator and sends the scaled position from the hand of the user to the microscope tip. This setup can improve drastically the controllability and efficiency of nanomanipulations. In our Laboratory, we use an AFM SMENA A from NT-MDT as nanomanipulator. On the other side, we use two kinds of haptic device. First we have developed a 3 DOF haptic device with voice-coil actuators and potentiometer sensors. Second, we use a 3 DOF desktop Phantom haptic (Senseable technologies). The two main parts of this hardware are linked by high performance microcontrollers and a modular real-time program in the MATLAB environment. With our system, we realized manual mechanical lithography in CD sample and we succeed to sense surface topography and surface forces (like capillary) through the haptic device. 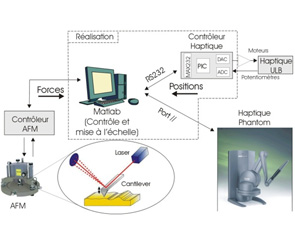
- Main structure of an AFM nanomanipulator
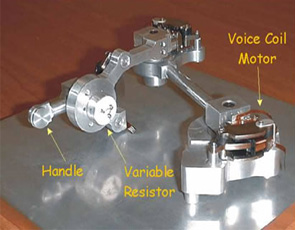
- DOF haptic device for teleoperated nanomanipulation

- Teleoperated nano-litography on CD surface