Navigation : EXPO21XX > AUTOMATION 21XX >
H05: Universities and Research in Robotics
> Italian Institute of Technology (IIT)
Italian Institute of Technology (IIT)

Videos
Loading the player ...
- Offer Profile
- Welcome to Robotics, Brain
and Cognitive Sciences
The research activity of RBCS develops around “the human being” along three main research streams: humanoid robotics with a focus on cognition, human behavioral studies and rehabilitation with a focus on action and perception, human-machine communication and interaction with a strong emphasis on the technological and scientific advancement of bidirectional direct interface to the nervous systems. RBCS is the house of iCub
Product Portfolio
Robotics, Brain and Cognitive Sciences

Labs
- Within this framework RBCS is organized in a number of
laboratories addressing, each with its own specificities and investigation
tools, topics like: learning and adaptation, multimodal perception and
affordance, motor control and learning, natural and social interaction,
attention and recognition. The three main streams of research are mapped
into the following laboratories:
Study Humans: Human Behavior and Rehabilitation Labs
Research in this stream will focus on understanding aspects of human behavior and perception which, besides their scientific value, are essential for the implementation of complex behaviors in artificial systems and new motor rehabilitation devices. All the research aspects addressed have in common the goal of understanding not only the motor and/or perceptual “process” per as but also how the processes adapt, learn and develop as a consequence of interaction with the environment and other human beings.
Build Humanoids: Cognitive Humanoids Lab
The main focus of the Cognitive Humanoids Laboratory activities is in the implementation of models of cognition in robots of humanoid shape. This has the two-fold aim of i) furthering our understanding of brain functions and ii) realizing robot controllers that can learn and adapt from their mistakes.
Interaction and Interface: Interaction and Interface Labs
The main effort in this area will be devoted to the study of chronically implantable Brain Machine Communication devices in humans. In particular the main focus of this long term goal is to implement bidirectional and “ad-hoc” interfaces. By this we mean interfaces that can be adapted to the residual functional abilities and the morphology of individual patients (up to the shape of the “connector”) and that can support bidirectional flow of information between the nervous system and the artificial device.
Cognitive Humanoids Lab
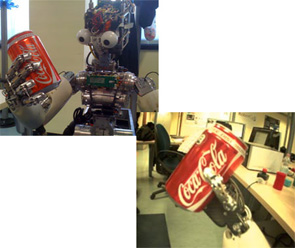
- Scientists at the Cognitive Humanoids Laboratory work at the forefront of the robotics and neuroscience research implementing models of cognition in robots of humanoid shape. This heterogeneous group of people aims at understanding brain functions and realizing robot controllers that can learn and adapt from their mistakes. Activities encompass the construction of the hardware, that we call "bodyware", and software which will make, one day, machines of intelligence comparable to humans. We call this technology "mindware". On the bodyware side we developed the iCub, a humanoid robot, shaped as a 4 years old child. Simultaneously, we are addressing the development of the technologies for the next generation of robots based on soft and adaptable materials both for sensing and processing. On the mindware side, the laboratory is involved in the realization of the cognitive skills of the humanoid robot; that is, providing the robot with visual, auditory and tactile perception and the ability to gaze, reach and manipulate objects.
Bodyware: the iCub
- The iCub is the humanoid robot developed as part of the EU project RobotCub and subsequently adopted by the Cognitive Humanoids Laboratory at IIT. It has 53 motors that move the head, arm & hands, waist, and legs. It can see and hear, it has the sense of proprioception (body configuration) and movement (using accelerometers and gyroscopes). We are working to improve on this in order to give the iCub the sense of touch and to grade how much force it exerts on the environment. Simultaneously, we are already planning the next generation of humanoid robots: they will be made of soft actuators, new stronger and lighter joints with power efficiency closer to that of biological systems like ourselves.
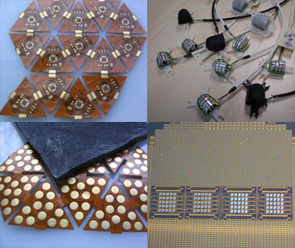
Skin
- Tactile sensing is one of the key missing technologies for humanoid robots to interact safely in everyday environments. We are investigating various technologies with the aim of constructing a full-fledged robotic skin that includes seamless integration of sensing, wiring and processing. The realization of a robotic skin is made complicated by the necessity of covering a wide area, conforming to the shape of the body while standing considerable mechanical stresses (including impacts). Data have to be collected from this distributed network of sensors and made available at various levels of processing for reactive control and planning. Further, tactile data have to be combined with other modalities like proprioception and force/torque measurement. Our current solutions are based on capacitive and piezoelectric sensing both at the millimeter and micrometer scale (VLSI).
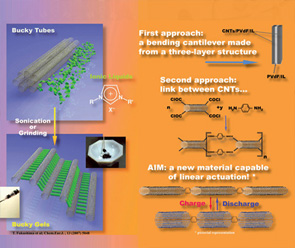
Materials
- From nano actuation to macro actuator
Carbon Nanotube actuators - The main issue in developing devices based on nano scale actuation mechanism is the transfer of stress induced at the level of the single Carbon Nanotube (CNT) to the macroscopic domain. A possible approach to this issue is to. The transfer of stress induced at the level of the single CNT to the macroscopic domain can be achieved by a novel approach to the problem. Instead of simply using van der Waals interaction between CNTs or merely incorporating in a polymeric matrix, the idea is to link CNTs via chemical bonds in order to create a copolymer with single nanotubes as repeating unit. To this end one possible route is to create two different kinds of CNTs, one functionalized with carboxylic group and the other amino substitutes; these moieties can react without any addition of catalyst as in the synthesis of polyamides (i.e. Nylon 6,6). An easiest route to link CNTs via chemical bond is to use a linker molecule, i.e. an aromatic diamine, that could react with acyl chloride (-COCl) modified CNTs as shown in the above scheme.

Infrastructure
- The Cognitive Humanoids Laboratory relies also on
mechanical, electronic and informatics support both internally and through
the shared resources of the RBCS department. In particular, our technical
infrastructure helps in developing new mechanical and electronic components,
debugging existing solutions, and to maintain our robots and computational
infrastructure. Mechanical development is carried out together with the
mechanical workshop facility, electronics is developed in collaboration with
the electronics design laboratory and the computer network is maintained
together with the RBCS system administration group. We also developed the
software and firmware infrastructure of the iCub (see for example yarp).
The current design focus on the development of a new release of the iCub called tentatively “v2” which includes force/torque control, a skin, and several mechanical improvements including bipedal walking capabilities (together with the advanced robotics department).
Mindware: the technology of cognitive systems
- Our real interest is of course in the eventual realization of intelligent machines. We research on the basic technology of cognitive systems and on its translation into a full working system. Our modus operandi in this case starts from biology, that is by "reverse engineering" the brain, continues through mathematical modeling of specific brain functions that finally find an implementation on the humanoid robot. Examples of the cognitive skills that we study are attention, reaching and manipulation. Although broad in scope this research has a clear and measurable target also of industrial interest. In particular, humanoid robots can be imagined as helpers in manufacturing, office or home environments. In this respect, for example, we address safety in human-machine interaction (at the cognitive, control, and hardware level). We also participate to projects that will add language skills to the ICub and we are developing microelectronics for sensing, actuation and processing.
Development
- Our stance on cognition coincides with the emergent systems approach: cognition is the process whereby an autonomous system becomes viable and effective in its environment. From the implementation point of view, we see cognition as the ability to predict the future unfolding of events initially dealing with the immediate (closer to direct sensory perception) and gradually developing to span a longer time frame (where sensory perception alone cannot get). Cognition cannot be hand-coded, it is necessarily the product of a process of embodied development. Thus, studying and modeling learning and development is a crucial aspect of our research agenda.
Motor control
- Motor control has a predominant role in the understanding of cognition [ref 1]. We employ various methods ranging from machine learning and non-linear optimization to investigation of human behavior (in collaboration with the human behavior lab). On the computational side, this is done using parametric and non-parametric techniques. The human behavior aspects are covered relying on the equipment of the human behavior lab for measuring kinematics of the arms and body, eye movements, and electromyography.
Affordances
- Vision and manipulation are inextricably intertwined in the primate brain. Tantalizing results from neuroscience are shedding light on the mixed motor and sensory representations used by the brain during reaching, grasping, and object recognition. We now know a great deal about what happens in the brain during these activities, but not necessarily why. Is the integration we see functionally important, or just a reflection of evolution’s lack of enthusiasm for sharp modularity? We instantiate these results in robotic form to probe the technical advantages and to find any lacunae in existing models. We believe it would be missing the point to investigate this on a platform where dexterous manipulation and sophisticated machine vision are already implemented in their mature form, and instead follow a developmental approach from simpler primitives.
Visuo-haptic Perception Lab
- All senses provide simultaneous information about our
environment and this information needs to be combined into a single percept.
The focus of the activity of the lab is the study of unimodal visual, tactile and auditory perception in humans their multimodal integration. We principally investigate the integration between visual and tactile signals with the goal of understanding the rules that govern the merging of perceptual information mediated by the intention to move signals and prior knowledge. Such aspects are relevant for the understanding of human perception as well as for the implementation of artificial systems. Furthermore the interest of our research is extended at the analysis of the dynamic of these perceptual capacities during development in normally sight children and considering patients with visual disabilities. 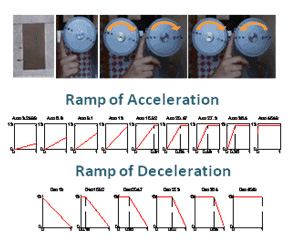
Visual and tactile motion perception
- The principal aim of this project is to investigate the
similarities between visual, tactile and bimodal perception of tactile,
optic and bimodal flow. We study with psychophysical techniques unimodal and
bimodal velocity discrimination thresholds for flow perception with real
wheels etched with a sinewave profile of different spatial frequencies. Our
system gives us the possibility to drive each wheel at a specific velocity
and to create conflictual stimulation between the two modalities (Gori et.al.
2008). With this project we can answer many questions related to the
analysis of unimodal visual tactile and multimodal flow perception and give
us the possibility to investigate if a supramodal system of analysis may be
present.
We also study the visual, tactile and bimodal transient motion perception of accelerating and decelerating stimuli with psychophysical techniques.
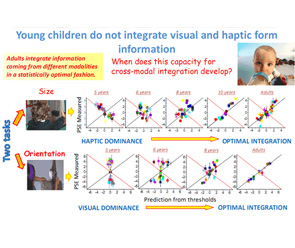
Development of cross modal integration
- The principal aim of this study is to investigate how
children integrate multimodal cues. Recent studies show that the human brain
integrates information across the different senses and this integration has
been shown to be to be statistically optimal in adults. At what age do
children start to integrate sensory signals to obtain a more robust
perception, and is this integration optimal? In our laboratory we are
studying the properties of the development of this ability. In our past
studies we showed that prior to eight years of age, integration of visual
and haptic spatial information is far from optimal, with either vision or
touch dominating totally, even in conditions where the dominant sense is far
less precise than the other. By eight-ten years, the integration becomes
statistically optimal, like adults (Gori et.al. Current Biology, 2008).
In line with this kind of study we are also investigating how different ability and their multimodal integration develop during childhood by using different kind of real objects and by extending the study in children with different disabilities.

Figure 1: haptic devices designed at human behavioiur lab at IIT.
- A-Braccio di Ferro BDF in bimanual configuration, B-Haptic Grasp unit, C- IIT Wrist Robot, D- 12DOFs Haptic Workstation for Bimanual manipulation of distal and proximal arms.
Motor Learning and Rehabilitation Lab
- The activity of the Lab is focused on the study of the
neural plasticity that underlies the organization of the human sensorimotor
system and its capacity to learn motor skills in the context of a complex
environment. This also includes cognitive aspects in the neural control of
movements because we believe in “embodied intelligence”: we see adaptive
behavior as the emergent property of the bi-directional interactions of the
nervous system with the body and the environment. This implies a continuous
exchange of signals/energy between the nervous system, the body and the
environment and it means that the motor neuronal input is shaped by the
biophysics of the sensory organs and the motor neuronal output is
transformed by the biomechanics of the body creating, at the same time, a
large set of constraints & affordances.
Within this background the Lab investigates paradigms of motor learning and control by using visuo-haptic, dynamic virtual environments and measuring the motor response (in terms of kinematics and kinetics) and the corresponding neural correlates (in terms of muscle activity –EMG- and brain activity – EEG and NIRS).
The haptic part of the virtual reality system is provided by a several haptic robots (figure1) that have been designed in the lab (BdF in mono- or bi-manual configuration, IIT-Wrist robot, haptic grasp unit).
Inter-limb interference during bimanual adaptation to dynamic environments
- The two robots generate two independent curl viscous force fields that tend to deviate the hands laterally in the clockwise or counterclockwise directions. The focus of the study is on the patterns of interference between the two learning processes (for the left and right hands, respectively).
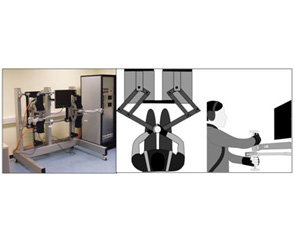
Figure 2 Experimental set-up
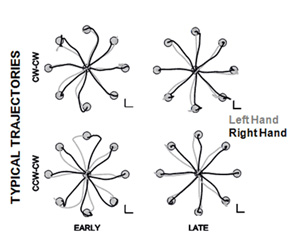
Figure 3: Movement trajectories at the beginning (left) and end (right) of the force field adaptation phase, for two typical subjects in the CW-CW group and CCW-CW group. Lines in grey and black denote, respectively, the left and right hand. Scale bar: 2 cm.
Visuo-proprioceptive integration for compensating dynamic perturbations of wrist pointing movements
- The subjects perform pointing movements with their wrist, with various combinations of visual/kinesthetic perturbations input by means of the visual feedback and the wrist device.
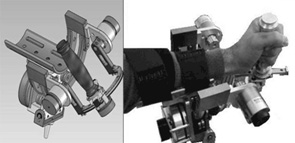
Figure 4: IIT Wrist Robot.
- It has 3 DoFs: Flexion/Extension, Pronation/Supination, Adduction/Abduction. One motor is used for F/E and P/S; two motors for A/A.

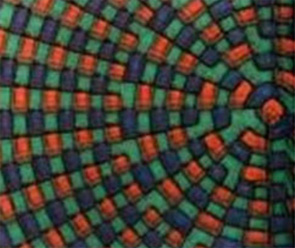
Figure 5: Wrist robot and Virtual Reality.
- Visual representation of the target position and the actual pointing direction, as two circles, in relation with the manipulandum degrees of freedom. The two circles are visualized against a structured background (a stripe pattern). The overall picture could be fixed, with respect to the computer screen, or rotated in an harmonic manner. A: familiarization setup, B:kinesthetic disturbance; C: visual disturbance; D: visuo-kinesthetic disturbance.
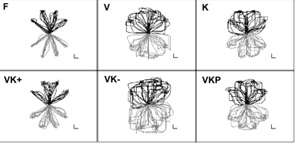
Figure 6 example of trajectories for different target sets.
- Black trajectories start from the center to each peripheral targets while grey trajectory are towards the center from the peripheral four targets and are mirrored below in the figure for graphical clarity sake; in (A) Familiarization (F), (B) visual (V), (C) kinesthetic (K) , (D) visuokinaesthetic (VK+), (E) visuo-kinaesthetic 180° phase lag (VK-) and (F) visuo-kinaesthetic 90° phase (VKP); target set (scale bar 2.5 cm).
Minimally assistive reaching strategy in robot therapy
- The robot helps severe hemiplegic patients to perform reaching movements by generating assistive force fields of minimal intensity, in order to foster the emergence of active, goal oriented movements in a quasi-paralyzed limb.
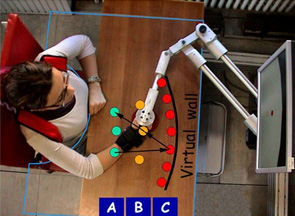
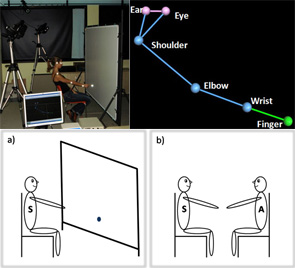
Figure 7 A view from above of a subject holding the manipulandum.
- The subject’s shoulders are strapped to a chair; the
forearm is attached to a sliding support; the wrist is stabilized by means
of a skateboard wrist brace and the hand grasp by means of a Velcro holder.
The targets are arranged on three layers: A, B, C. The C layer is placed in front of a virtual wall.
The basic sequence of target activation is A - C - B - A and it is repeated 3 9 7 9 3 = 63 times in a random order.
Note that the target distance in the figure is twice the real distance for graphical reaso.
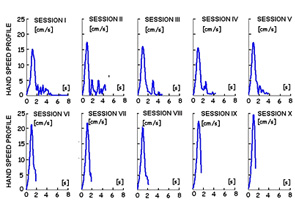
Figure 8 Evolution of the speed profile from the initial to the final session, performed by a subject for the same movement (from the central position of the A layer to the central position of the C layer).
- In general, all the subjects were characterized by a trend to quicker and smoother reaching movements in spite of the fact that the level of the assistance force was progressively reduced
Adaptive robot assistance in tracking movements
- The robot helps the patient in tracking a moving target (simple Lissajous figure-of-eight) with an assistive force field that is modulated automatically as a function of the performance.
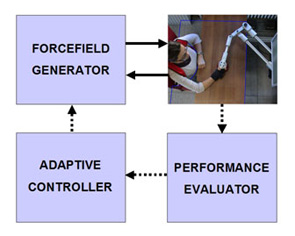
Figure 9: The Force field generator uses an impedance control scheme, with the direct drive of the robot actuators, in such a way to transmit to the handle a force vector computed as a function of the kinematic state of the robot (sampling frequency: 1 kHz).
- The Adaptive Controller modulates the gain of the force field as a function of the evaluated performance, according to a non-monotonic training protocol. Continuous vectors: continuous time control; Dotted vectors: intermittent control.
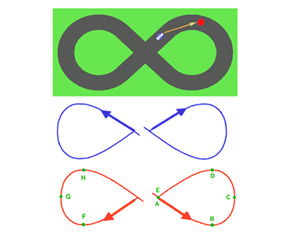

Figure 10 Left: The top panel replicates the picture on the computer screen that includes the figure-of-eight path (black), the moving target (red circle), and the hand position (whitish car-shaped). The middle and bottom panels show the two tracking directions used in the experiments:
- CWright_CCWleft (blue), CCWrightCWleft (red). A – H are the eight control points used by the algorithm of performance evaluation. Right - The top set of 4 figures is related to a subject with a sever impairment level (FMA= 4). The bottom set of figures is related to a subject who is affected in a lighter way (FMA= 25). Blue denotes the clockwise-right/counterclockwise-left sequence; Red denotes the counterclockwise-right/clockwise-left sequence.
Action and Perception Lab
- The main focus of the scientific activities of the lab is to advance the understanding of the mechanisms involved in the production of goal oriented actions. The working hypothesis is that action and perception processes are strongly linked. Consequently action production is studied by considering both motor command and perceptual feedback. Perception is investigated through several experimental paradigms based on the idea of online mental simulation of the observed action. Action is studied by considering simple (arm) and whole body movements, where empirical observations are associated to numerical simulations. Among several specifics questions that are addressed we try to understand how the gravity force field is represented at the different levels of the CNS. A potential cognitive representation is studied using the recorded kinematic and muscle activity of simple arm reach to grasp movement performed in a real or a virtual environment. A sensorimotor representation is also considered by studying the multijoint body mechanical system during a whole body reach to grasp motion. The existence and the combination of specific motor primitives is investigated in the frame of our understanding of the coordination of reaching and equilibrium subgoals inherent to this complex task. The plasticity of action production is investigated after hypo activity and learning. Functional (motor efficiency through kinematic analysis) and structural (brain plasticity through transcranial magnetic stimulation SEP and MEP recording) experiments are conducted simultaneously.
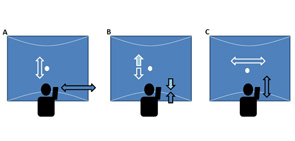
Effect of visual context on arm motion planning
- It is well known that visual information is necessary to
execute accurate goal-directed tasks. Other sensory inputs as proprioception
and vestibular information contribute as well, elaborating the initial state
of the sensorimotor system during motor planning and keeping the on-line
control of execution. The relative roles of vision and proprioceptive
inputs, however, have still to be quantified. To this aim we investigate the
influence of visual feedback on action planning by means of a visuo - motor
conflict.
Visuo motor conflicts presented in the experiment: A) Horizontal arm motion (black arrow) with vertical visual feedback (white arrow) B) Vertical arm motion (black arrow) with vertical visual feedback in opposite direction (white arrow) C) Vertical arm motion with horizontal visual feedback (white arrow) .
We ask subjects to perform vertical and horizontal single-joint arm pointing movements, while they visually perceive either congruently or incongruently (e.g. orthogonally) directed movements. The changes in the arm velocity profiles produced by this visual feedback manipulation represent a good measure of the effect of a conflicting visual information on motion. This will allow us to check whether visual information can reorganize motor planning and change motion kinematics.
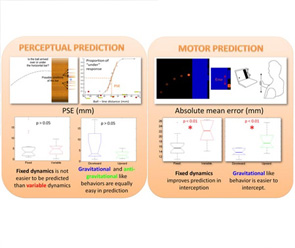
Perceptual and motor bases of prediction
- Prediction is a central skill in human life. As our
environment is constantly changing, both as a consequence of our actions and
independently of us, it’s necessary to anticipate when and where future
events will happen, in order to be able to synchronize our actions with them
and to proficiently interact with the world. The study of interception
abilities represents a good option to investigate this topic, as
interception is a quite common task and, at the same time, it strongly
requires anticipation skills.
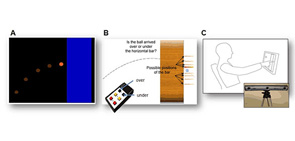
Methods and apparatus of the experiments on prediction: A) The visual stimulus, i.e. a virtual target moving on a screen. B) Purely visual task schema and response box used by subjects to answer. C) Interception task schema and motion tracking cameras (Optotrak system) used to record index finger motion.
In our experiments a ball disappears behind an occlusion after following parabolic paths. Subjects should either select where the ball would arrive after the occlusion (only vision involved) or directly intercept the virtual target by pointing on it with their index finger (vision plus motor involvement). This way it is possible to understand whether the goal of a predictive effort affects how prediction is performed and if an internal model of target motion is built and exploited in prediction.
Action and perception coupling
- The general aim of this research theme is to understand the organizational principles sub serving the control of natural goal-oriented actions and how this control is implemented at physiological level. Two different experimental paradigms are applied: biological motion recognition and motion imitation.

Dexterous control of a robotic hand
- The stiffness - the change in resistive force that counteracts the effect of external loads - is substantially dependent on variability in limb geometry and orientation, and on antagonist muscles co-contraction. The control of joint impedance provides mechanical stability in presence of external perturbations and this is the reason why active modulation of limb impedance by the central nervous system (CNS) is considered an essential part of effective motor control.

Object feature extraction
- In our everyday life we reach, grasp and manipulate many different objects, and we also look at other people executing these same action. The relationship between some intrinsic object features and the temporal coordination of joints` motion during reach to grasp tasks are extensively described in literature by a growing corpus of researches. Human sensibility to the biological motion is also extensively studied, with a focus on the capability to recognize human actions and their subtle details from highly impoverished stimuli, like ‘point-light displays’.
Cortical and functional plasticit
- Michela here is working to better understand if a brief period of hand non-use may induce modifications in the motor performance during a grasping task and if cortical plastic changes occur in the brain. To this issue, we immobilized subjects’ hand with a soft bandage used in everyday clinical practice by physiotherapists.
Brain Machine Interface Lab
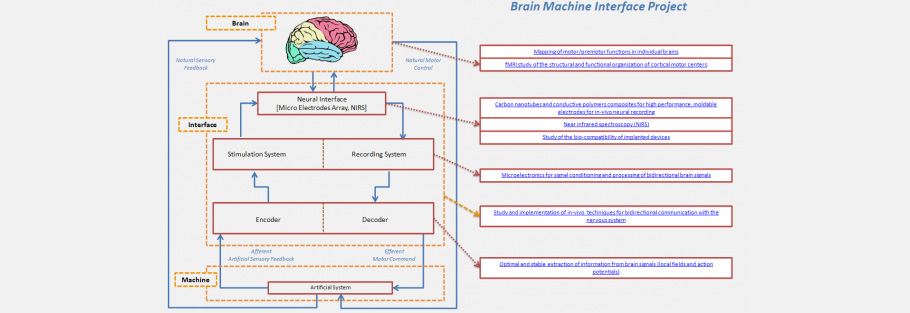
- This laboratory sets out to identify research paths that can effectively lead to the development of an artificial system capable of interacting with the ambient under cerebral control. Its distinctive characteristic lies in the fact that it integrates different approaches, making it particularly suitable for a research environment such as that of the Italian Institute of Technology (IIT). A peculiar feature of the proposed approach is the acquisition of in vivo data. This is because, though the project is considered of as a source of fundamental data for basic research, it is and remains an applicative project incorporating major technological challenges. As all the stages of the research project carried ou in the BMI lab are applicable to the man, this predetermines the choices of the materials and procedures required for its realisation. Although the majority of the research is performed within the Department of Robotics, Brain and Cognitive Science, the project benefits also from the contribution and collaboration of various other branches of the IIT, such as Neuroscience and Nanotechnology. Specifically, as regards those project skills that cannot be found within the IIT, use has been made of a network of collaborators including some leading Italian research centres. Among them, the Politecnico of Milan Electronics (POLIMI-ele) and Physics (POLIMI-phys) Departments, the Neurophysiology Sections of the Universities of Ferrara (UNIFE) and Modena (UNIMO), the Neurosurgery Department of the Udine Hospital “S.M. della Misericordia” (NSG), the SISSA in Trieste, and the Northwestern University of Chicago (NW).
Technology-related research area
Carbon nanotubes and conductive polymers composites for high performance, moldable electrodes for in-vivo neural recordings
- The aim of the research is to develop a new class of
in-vivo neural recording electrodes that do not rely only on metals or
silicon based materials, opening the way to the realization of long term
neuro-electric interfaces. Particular attention is devoted to significantly
improve the signal-to-noise ratio, to explore the possibility of epicortical
mid-impedance recordings, to improve the biocompatibility of implants and
therefore their temporal stability.
By exploiting the ability to control down to the molecular level the manifold properties exhibited by polymers (such as variable mechanical stiffness, actuation, electrical conductivity and bio-functionalization) together with the outstanding electrical and mechanical properties of carbon nanotubes, we envisage a totally new way of manufacturing nano, micro and macro scale neural probes with very low anatomical impact and high efficiency. In the long run, an all "organic" implantable system (i.e. including signal conditioning) can be foreseen.
Microelectronics for signal conditioning and processing of bidirectional brain signals
- In an effort to create fully implantable neural
recording/stimulating devices, scientists of this lab, in collaboration with
the "Politecnico di Milano", are interested in combining multi-electrode
arrays with integrated complementary metal-oxide-semiconductor (CMOS)
electronics.
Some Application-Specific-Integration-Circuits (ASICs) are being designed within this lab, in order to be used in the development of brain-machine-interfaces. A first prototype, comprising 8 low-power and low-noise neural signal amplifiers was designed and successfully tested in-vivo with rats. Two distinct solutions comprising respectively 16 and 64 channels, with on-chip A to D conversion and spike detection are currently under test. Wireless communication solutions, as well as stimulation circuits to provide sensory feedbacks are currently subject of study
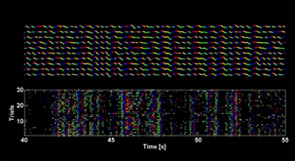
Optimal and stable extraction of information from brain signals (local fields and action potentials)
- It is widely believed that the biggest bottleneck in the
construction of Brain-Machine Interfaces comes from the relatively little
amount of control and information about intended actions or relevant sensory
variables that we are able to extract from the extracellular neural signals
recorded from the brain. The research of the Brain Signal Analysis
Laboratory aims at enlarging this bottleneck, by devising optimal ways to
extract as much information as possible from brain recordings. This is aims
is pursued by 1) designing mathematical methods, mainly based on information
theory and Bayesian decoding (Quian Quiroga and Panzeri, Nature Reviews
Neuroscience 2009) that can extract as much information about external
correlates as possible from the signals that can be obtained from
extracellular electrodes (such as Local Field Potentials (LFPs), or action
potentials (APs) 2) by applying these methods to real data to learn more on
how the activity of sensory and motor cortices conveys information.
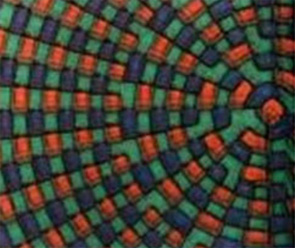
Examples of recordings of slow Local Field Potential waves (top panel) and of action potentials (shown as dots in the bottom panel) in primary visual cortex during the presentation of color movies. In both panels, each line plots the response to different repetitions of the same movie.
Neurophysiology-related research area
Mapping of motor/premotor functions in individual brains
- Recordings of neuronal activity (individual neurons,
evoked potentials, local field potentials) are generally performed on
cerebral regions identified according to anatomical criteria, the main ones
being the configuration of the cerebral sulci (for the cortex) and the
stereotaxic position (for the subcortical nuclei). On the other hand, the
recent introduction of functional magnetic resonance makes it now possible
to localize on single individuals the cerebral regions that become active
during particular motor, perceptual or cognitive tasks.
In neurosurgery patients, during the electrophysiological characterization of the brain tissue surrounding a cancer, the association of fMRI (pre-operative) with recording of nerve activity (intraoperative) opens up immense research possibilities as it makes it possible to record neurons exactly where cerebral activation is known to be present. This provides on the one hand precious information to the surgeon about the functional borders of the tumor, on the other hand, the large number of case histories and the ubiquitarian nature of the gliomes (the type of tumors more often requiring such a functional mapping) allow numerous recordings to be made in motor and premotor regions every year.
This sub-project is done in collaboration with the Neurosurgery Department of the Udine Hospital and the Section of Human Physiology of the University of Ferrara.
Study and implementation of in-vivo techniques for bidirectional communication with the nervous system
- The main idea of a Brain Machine Interface consists in extracting neural signals directly from the brain and use them to control external devices. In the framwork of building neuralprostheses this technique could be useful to better understand how the brain processes the sensory information coming from the environment and uses it to build motor commands. To reach this result a crucial point is to develop a BMI real-time system to create a bidirectional communication channel with the nervous system. In our lab we are implementing in-vivo techniques using multielectrode microwires arrays chronically implanted in the cortex of awake rodents. These techniques permit to record the neural activity from the cortex while the animal is behaving and simoultaneously to deliver Intracortical Micro Stimulation (ICMS) patterns providing an artificial input in a closed-loop system.
fMRI study of the structural and functional organization of cortical motor centers
- This subproject sets out to study, using non-invasive
fMRI techniques, the anatomical-functional organisation of the cortical
systems involved in the coding of action and movement in healthy volunteers.
Although some aspects have been extensively investigated using
electrophysiological and brain imaging (MEG, PET, fMRI) techniques to
demonstrate the involvement of various parietal and frontal areas in the
organisation and representation of motor acts, the anatomical-functional
connectivity pattern of the parietal-frontal circuits in humans is not yet
properly defined. We are therefore aiming to:
- Perform detailed morphometric studies of the structure of the human motor cortex and premotor cortex by quantitatively analysing cortical grey matter from high spatial resolution MR images.
- Perform a high temporal resolution study of the rest connectivity pattern of parietal-frontal cortical areas.
- Perform high-resolution fMRI studies on the spatial-temporal activation pattern and on the connectivity pattern of parietal-frontal cortical areas in relation to the execution, observation and ideation of motor acts.
Studies carried out in collaboration with the Section of Human Physiology of the University of Modena and Reggio Emilia
Brain Imaging Lab
- The study of the functional response of the motor
cortex during the programming, execution and mental representation of
voluntary movements is of great relevance; given the high integration of the
visuo-motor, sensory feedback and proprioceptive systems, it is important to
be able to evaluate it in conditions that closely approximate the real.
The main goal of the activity here is to develop an MR machine that could be used to record functional data from subjects maintaining an an erect stance (at least for the trunk), and with sufficient limb freedom to afford the execution of simple motor tasks.
The main effort in this activity is devoted to the finalization of the project of the magnet.
A relevant part of the project deals with the optimization of the structure, to make it easier to transfer to cost sensitive applications such as conventional clinical imaging; another significant area is represented by the field compensation techniques that will merge with the design of the gradient coils.
In parallel to the fMRI scanner design a close eye will be kept on the development of the Near Infrared Spectroscopy (NIRS). It is a complementary technique that offers, with respect to fMRI, a worse spatial resolution but presents the advantage of a much lighter equipment and could become, once fully developed, a valuable complement to MRI.
Tissue Engineering Lab
- One of the IIT main technological goals is to move
ahead from traditional humanoids with mechanical hands and legs (hard-bodied
systems) toward next generation hybrid systems realized with soft materials,
artificial muscles, tendons, growing tissues, bio-sensors (soft-bodied
systems). This ambitious goal requires a deep investigation of soft,
functional, anisotropic materials mimicking our skin, tendons and bones but
also development of self-repairing, evolvable materials. By endowing such
materials with appropriate biocompatible and functional properties, highly
efficient interfaces between biological systems and artificial devices may
be created, allowing the development of innovative prosthetic devices.
To this end a Tissue Engineering Laboratory is established in Morego bringing together researchers from the IIT Central Labs and IIT Network with the common aim of interfacing biological systems to artificial devices.
Topics addressed:- Formulating nanobiomaterial scaffolds
- Understanding and controlling cellular response: 3D organization
- Bio-reactor based tissue engineering and testing
- Robotic Prostheses development
- Coupling of structural elements of artificial limbs with bone tissue