Navigation : EXPO21XX > AUTOMATION 21XX >
H05: Universities and Research in Robotics
> Northeastern University
Northeastern University

- Offer Profile
- We employ biomimetic approaches to confer the adaptive capabilities of marine animal models to
engineered devices. These devices include sensors, actuators, adaptive logic systems, electronic
nervous systems, biomimetic underwater robots and neurorehabilitative devices.
Our Field of Research Technologies are biomimetic robots, electronic nervous systems, myomorphic actuators, neuromorphic sensors, behavioral libraries, neurorehabilitative devices.
Product Portfolio
Projects
Biomimetic Robots
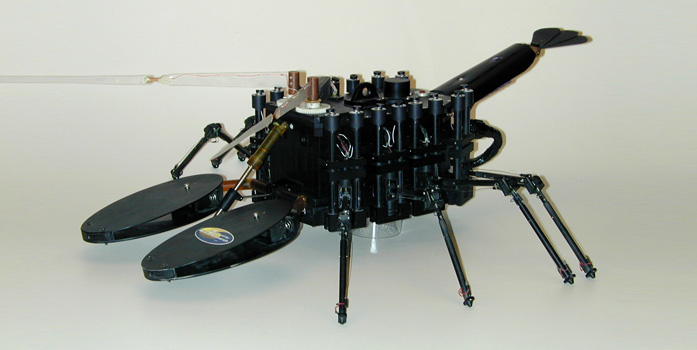
- We are developing neurotechnology based on the neurophysiology and behavior of animal models. We developed two classes of biomimetic autonomous underwater vehicles (see above). The first is an 8-legged ambulatory vehicle that is based on the lobster and is intended for autonomous remote-sensing operations in rivers and/or the littoral zone ocean bottom with robust adaptations to irregular bottom contours, current and surge. The second vehicle is an undulatory system that is based on the lamprey and is intended for remote sensing operations in the water column with robust depth/altitude control and high maneuverability. These vehicles are based on a common biomimetic control, actuator and sensor architecture that features highly modularized components and low cost per vehicle. Operating in concert, they can conduct autonomous investigation of both the bottom and water column of the littoral zone or rivers. These systems represent a new class of autonomous underwater vehicles that may be adapted to operations in a variety of habitat

Lobster robots
RoboLamprey
Cyberplasm
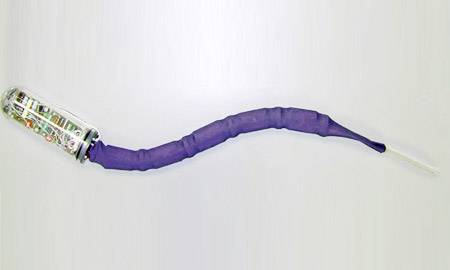
- We are collaborating with investigators at The University of California, The University of Alabama and Newcastle University to apply principles of synthetic biology to the integration of a hybrid microbot. The aim of this research is to construct Cyberplasm, a micro-scale robot integrating microelectronics with cells in which sensor and actuator genes have been inserted and expressed. This will be accomplished using a combination of cellular device integration, advanced microelectronics and biomimicry; an approach that mimics animal models; in the latter we will imitate some of the behavior of the marine animal the sea lamprey. Synthetic muscle will generate undulatory movements to propel the robot through the water. Synthetic sensors derived from yeast cells will be reporting signals from the immediate environment. These signals will be processed by an electronic nervous system. The electronic brain will, in turn, generate signals to drive the muscle cells that will use glucose for energy. All electronic components will be powered by a microbial fuel cell integrated into the robot body. This research aims to harness the power of synthetic biology at the cellular level by integrating specific gene parts into bacteria, yeast and mammalian cells to carry out device like functions. Moreover this approach will allow the cells/bacteria to be simplified so that the input/output (I/O) requirements of device integration can be addressed. In particular we plan to use visual receptors to couple electronics to both sensation and actuation through light signals. In addition synthetic biology will be carried out at the systems level by interfacing multiple cellular /bacterial devices together, connecting to an electronic brain and in effect creating a multi-cellular biohybrid micro-robot. Motile function will be achieved by engineering muscle cells to have the minimal cellular machinery required for excitation/contraction coupling and contractile function. The muscle will be powered by mitochondrial conversion of glucose to ATP, an energetic currency in biological cells, hence combining power generation with actuation.
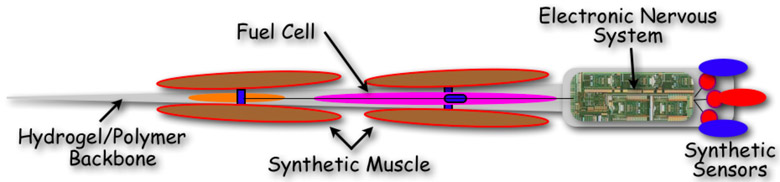
Cyberplasm Vehicle
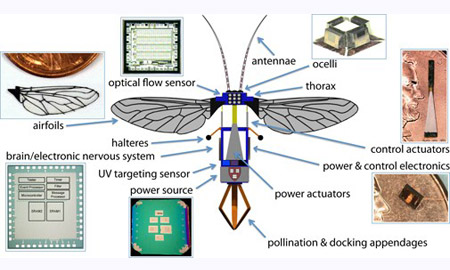
RoboBees
- We are collaborating with investigators at Harvard University School of Engineering and Applied Sciences, the Wyss Institute for Biologically Inspired Engineering and CentEye to develop colonies of Robotic Bees. This project integrates approaches at the body, brain and colony level. Inspired by the biology of a bee and the insectÕs hive behavior, we aim to push advances in miniature robotics and the design of compact high-energy power sources; spur innovations in ultra-low-power computing and electronic smart sensors; and refine coordination algorithms to manage multiple, independent machines
Robo Bee
Electronic Nervous Systems
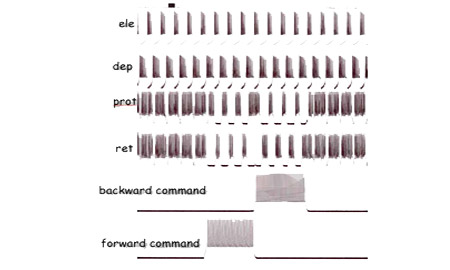
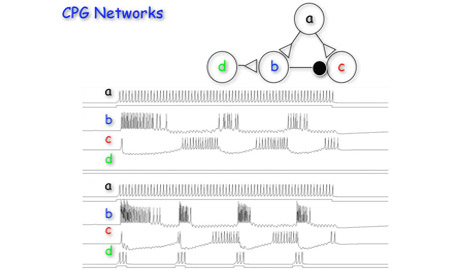
- We are also developing neuronal circuit based controllers for both robots and neurorehabilitative devices. These controllers are based on UCSD Electronic Neurons and and UCSD Discrete Time Map-based neurons.
UCSD Electronic Neurons
UCSD Discrete Time Map-based neurons