Navigation : EXPO21XX > AUTOMATION 21XX >
H05: Universities and Research in Robotics
> University of Manitoba, Winnipeg
University of Manitoba, Winnipeg

Videos
Loading the player ...
- Offer Profile
- Lab E1-451 is home to:
- Nonlinear Systems Research Laboratory
- Laboratory for the Design of Mechanisms.
Laboratory for Design of Mechanisms (LDM) and Nonlinear Systems Research Laboratory (NSRL) were established in 1998. LDM and NSRL share common goals: To conduct fundamental and applied research in the areas of nonlinear dynamics and mechanism design; to train both undergraduate and graduate students in the fields nonlinear dynamics and mechanism design, and to conduct industrial research projects.
Product Portfolio
Nonlinear Dynamics (funded by NSERC)
- · Uniqueness of Filippov's Solutions for Non-Smooth
Systems Having Multiple Discontinuity Surfaces
· Extensions of Lyapunov's stability theory to non-smooth systems
· Stability analysis of nonlinear and non-smooth systems via Lyapunov's exponents
· Calculation of Lyapunov exponents using a time series
· Lyapunov's stability control
Legged Locomotion Robots (funded by NSERC)
- · Dynamics and control of bipedal locomotion
· Impact dynamics in bipedal locomotion
· Energy-efficient bipedal walking
· Passive dynamic walking (biped, Quadruped)
· Repeatable Gait for Motion Planning of a Planar Five-Link Biped
· Under-actuated control of bipedal locomotion 
2009: Fourth kneed passive dynamic walker
- The fourth kneed passive dynamic walker was designed and built by Derek Koop. It can walk on the treadmill for 100 steps and we have compared the gait of the above walker walking on the ramp and on a treadmill. We are going to use this walker for experimental research of passive dynamic gait and its stability.

2008: Third kneed passive dynamic walker
- The third kneed passive dynamic walker was refined by Derek Koop and Dean Ferley. It is used to study the effects of the changes in the lengths of the thighs and shanks on the gait patterns.

2008: Passive dynamic quadruped
- A passive dynamic quadruped which can trot was built by Mathew Nesbitt. To the best of our knowledge this is the first passive quadruped built in the world. We later added two sets of knee joints, but can only make it walk for one step. If you have any suggestions on how to make the kneed passive quadruped walking or you know any passive quadrupeds built, let us know.

2008: Second kneed passive dynamic walker
- The second kneed passive dynamic walker, Dexter, was designed based on Jie's work, by Andrew Greaves and Ian Lohrenz. It was used to study the effects of the changes in the ramp angle and mass distributions of the thighs and shanks on the gait patterns.
2007: First kneed-passive dynamic walker
- The first kneed-passive dynamic walker, built by Jie Chen in my lab in 2007. It was used to study the effects of the changes in the ramp angle and mass distributions of the thighs and shanks on the gait patterns.

2004: First passive straight-legged bipedal walker
- First passive straight-legged bipedal walker with flat feet was built in my lab by Nabil Sebat in 2004. It was used to study the effects of ramp angles, friction between the feet and the ramp, and the size of the flat feet on the gait patterns.
Accelerated durability testing for ground vehicles (funded by MITACS, MCI and Westest)
- · Creating the driving profile for accelerated testing
using "GlyphWorks"
· Time series analysis to reveal basic and advanced characteristic features of the time series of field testing
· Development of neural-network-based classifications for creating a Mission Profile for accelerated testing
· Development of a method for generating reference signal using a statistical computational approach
Design of "Wind Beast"
- Design of "Wind Beast" based on Mechanism design and GA (some video clips of Mr. Theo Jansen's wind beasts, movie-1, movie-2, movie-3
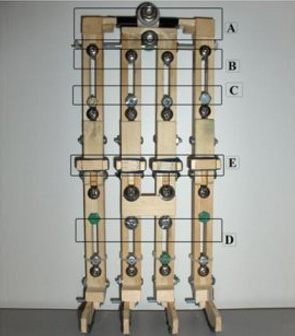
To Design And Build A Kinetic Structure
- - Objective-Design and build a simplified leg
- Desired Results:- Smooth and continuous motion
- No kinking/dead centers
- Flat output profile
- Components:
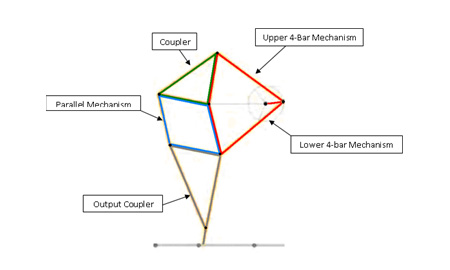
- Two four-bar mechanisms
- Two couplers
- One parallel mechanism
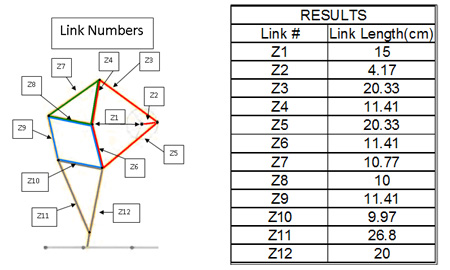
Methods used: (Image shows the results)
-
- Freudenstein’s Equation for 3 point function generation used for the four bar mechanisms
- Ground-Pivot Specification used for parallel mechanism and output
coupler

Christine Wu with Kinetic sculptor Mr. Theo Jansen at Dynamic Walking 2008 at Delft Holland.

Mr. Jansen's "Wind Beast".
Control of Hydraulic manipulators having contact with the environment (funded by NSERC)
- · Lyapunov-based Accurate position, force and impact
control of a Hydraulic Actuator with Friction
· Nonlinear Analysis of hydraulic actuators via Lyapunov exponents
Stress analysis (funded by NSERC and Faculty of Dentistry of University of Mnaitoba)
- · Stress analysis of post-core reinforced
endodontically treated teeth using FEM
· Stress analysis of post-core reinforced endodontically treated teeth using Photoelasticity
Biomechanics (funded by Manitoba Health Sciences Centre Foundation)
- · Evaluation of the Mechanical efficacy of Splints for Dynamic Forearm Rotational Splinting