Navigation : EXPO21XX > AUTOMATION 21XX >
H05: Universities and Research in Robotics
> Arizona State University
Arizona State University

Videos
Loading the player ...
- Offer Profile
- Where
engineering & computing intersect with your future
There are many complex systems affecting our lives today-robotics, automobiles, surgical equipment, and disaster response systems. The knowledge and skills needed to design and implement these systems lie at the intersection of multiple disciplines. ASU's Department of Engineering at the Polytechnic campus offers innovative interdisciplinary and multidisciplinary programs in engineering and computing that feature flexibility and hands-on application.
Product Portfolio
Stroke Therapy (home use): Spring over muscle actuator for medical application
- Objective:
For people affected by stroke, frequent physical therapy has been shown to be an effective form of rehabilitation.
To this goal, several home therapy devices have been developed. Many of these devices may benefit from the use of a bi-directional pneumatic muscle actuator.
Thus, the concept of double acting lightweight, economical, and easily scalable actuator that can be incorporated in rehabilitation devices is proposed.
Concept:
The strength to weight ratio of a McKibben air muscle is well known to be very high.
However, like human muscles they can only apply force in one direction, i.e. contraction.
In order to provide flexion and extension motions on a human joint two such actuators are needed in a antagonistic configuration.
The ASU-SOM actuator eliminates this limitation. By placing a simple compression spring in parallel with an air muscle,
a double-acting actuator with high strength to weight ratios can be created. 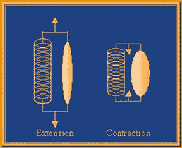
ASU-SOM Concept

ASU-SOM-I Actuator

ASU-SOM-III Actuator

ASU-SOM-III Actuator
Sit-To-Stand Device
- Objective:
Approximately 1.7 million people in the United States suffer from weakness in their lower extremities.
The objective is to design and develop a device that a user can wear to assist them in standing from a sitting position.
1 - Target assistance level is the torque needed to lift 20-50% of the body weight
2 - Must be lightweight
3 - Must be energy efficient
4 - Must be portable
5 - Must fit underneath clothing 
Design
- A compliant leaf spring is used to produce a bending torque about the knee to assist a person in standing.

Structure adjusted leaf spring
- Spring based actuation can be achieved through
"effective" structure manipulation of a leaf spring.
A bent beam or lead spring is a form of stored energy. In contrast to just simple loading (energy storage) and
unloading (energy return) of the lead spring, an extra step of altering the leaf spring's "effective" stiffness is introduced.
Bending a low stiffness lead spring requires little force and for a "wearable" robotic system the initial bending of the spring could come form the wearer.
However, once the leaf spring is deflected, energy proportional to its stiffness and deflection is stored.
Then at the moment when additional energy is needed, the actuator structure is changed thereby increasing its "effective" stiffness.
The return energy of the device is the proportional to the new stiffness and the original deflection, thereby creating a much stronger force to effect straightening of the spring.

Model
- An existing knee brace is used.
Powered linear actuator adjusts the length of the lead spring.
A roller is used to minimize friction as the length is changed.
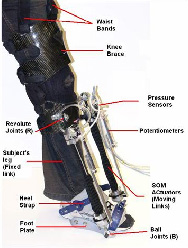
Spring Ankle Orthosis
- AFO 1 was completed in September 2006 and consisted of
a custom molded ankle foot orthosis with a custom sole for walking.
Two straps at the foot and one at the calf hold the user's leg in place and allow for easy donning and doffing.
The robotic actuator is attached to the orthosis at the calf and is attached to a lever arm that protrudes from the back of the sole.
AFO II was designed to be more lightweight and modular. The actuator was streamlined and the motor was directly attached to the actuator.
Carbon fiber lever arms were added to reduce weight.
A custom orthotic was built which could slip inside the shoe and allow the toes to flex easily during push off. 
Fig 1
- Thomas Sugar,
Department of Engineering, Arizona State University, Polytechnic campus

Fig 2
- Dosun Shin, Industrial Design, Arizona State University

Fig 3
- Thomas Sugar, Department of Engineering, Arizona State University, Polytechnic campus
SPARKy
- Arizona State University researchers have developed a
prosthetic device that literally puts the spring back into an amputee’s
step. The ASU scientists have developed and refined SPARKy (for spring ankle
with regenerative kinetics) into a smart, active and energy storing
below-the-knee (transbitial) prosthesis.
SPARKy is the first prosthetic device to apply regenerative kinetics to its design, which resulted in a lightweight (four pound) device that allows the wearer to walk on grass, cement and rocks, as well as ascend and descend stairs and inclines.
SPARKY operates by employing a spring to store energy as the wearer walks during normal gait, said Thomas Sugar, an ASU associate professor of engineering at the Polytechnic campus who led the research. Sugar and his colleagues—ASU doctoral students Joseph Hitt and Matthew Holgate, as well as Barrett Honors College student Ryan Bellman—have been developing and refining SPARKy for three years as part of a U.S. Army grant.
SPARKy uses a robotic tendon to actively stretch springs when the ankle rolls over the foot, thus allowing the springs to thrust or propel the artificial foot forward for the next step. Because energy is stored, a lightweight motor is used to adjust the position of a finely tuned spring that provides most of the power required for gait.
“SPARKY basically removes the old passive devices and makes it an active device the wearer uses to attain normal gait, which for an amputee is a significant return to normal function,” Sugar said. SPARKy is not only an active prosthetic device, but it also allows a wider range of movement than previous devices, it weighs less and it causes less fatigue for the wearer.
The device is featured in the January 2010 National Geographic magazine in an article called Merging Man with Machine, the Bionic Age (http://ngm.nationalgeographic.com/2010/01/bionics/thiessen-photography).
SPARKy provides functionality with enhanced ankle motion and push-off power comparable to the gait of an able bodied individual. Sugar said the device reached its primary goal of returning the functionality of the amputee to his/her status prior to losing a limb.
The device is built to take advantage of the functional mechanics of gait. A gait cycle is the natural motion of walking, starting with the heel strike of one foot and ending with the heel strike of the same foot.
“The cycle can be split into two phases, stance and swing,” Sugar said. “We are concerned with storing energy and releasing energy (regenerative kinetics) in the stance phase.”
The mechanics of walking can be described as catching a series of falls, Sugar added. In SPARKy, a tuned spring (acting like the Achilles tendon) breaks the fall and stores energy as the leg rolls over the ankle during the stance phase.
While the project is nearing completion of its three year grant, there still is much more work to do to refine the device.
To date, SPARKy has allowed users to walk on inclines, steps and to walk backwards, not trivial tasks for people who have only had access to passive, and sometimes cumbersome, prosthetics. In the future, the team plans to make additional improvements to lower the weight of SPARKy by integrating very fast microprocessors and using the smallest lithium ion batteries.
“We want our finished device to allow soldiers to return to active duty,” Sugar said. 
The prosthetic ankle set to "revolutionize prosthetics"
- SPARKy - short for Spring Ankle with Regenerative
Kinetics - will be the first-of-its-kind, smart, active and energy-storing
transtibial, or below-the-knee, prosthesis.
Once complete, SPARKy is expected to provide functionality with enhanced ankle motion and
push-off power comparable to the gait of an able-bodied individual.
Subject is walking at a very fast 3.7 mph on a treadmill with a powered prosthetic ankle.
SPARKy is a lightweight, energy efficient, and powerful device using a tuned spring for a given body mass.
At push off (frames 7, 8 and 9), the mechanical power out of the device is 2 to 4 times greater than mechanical power into the device.
This boost in power is possible by storing energy in the stance phase (frames 2, 3, 4, 5 and 6).
A spotter is holding a safety switch that can turn off the robot.
Gait Assistance
- The Human/Machine Integration Laboratory is designing
spring-based and pneumatic-based wearable robots that are safe, compliant,
energy efficient and powerful.
Tunable springs are used to build a powered ankle orthosis.
Pneumatic muscles are used to build a Gait Trainer for the ankle, and a Arm Mentor called RUPERT (Robotic Upper Extremity Repetitive Therapy). 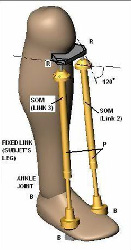
Concept Model
Working Prototype