Navigation : EXPO21XX > AUTOMATION 21XX >
H05: Universities and Research in Robotics
> University Carlos III of Madrid
University Carlos III of Madrid

Videos
Loading the player ...
- Offer Profile
- The Robotics Lab members are
pioneers in the European Union R&D projects in the field of robotics.
During earlier 90s several EU project were developed: Esprit II project PANORAMA (Perception and Navigation Systems for Mobile Applications), and Eureka projects SAMCA (Flexible shoe factory), AMR (Advanced Mobile Robot for Public Safety) and GEO (Big Range Robotized System). In 1992 the Esprit III project ROCCO (Robot Assembly System for Computer Integrated Construction) was started.
Product Portfolio
Robots

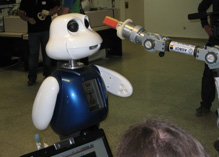
Maggie
- Maggie is a personal social robot built by the Robotics Lab (University Carlos III of Madrid). It is a research platform to study human robot interaction and robot intelligence and autonomy.

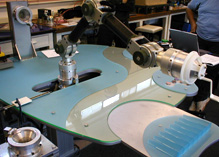
Asibot
- ASIBOT is portable assistive robot for elderly and disease people bringing more freedom in daily tasks as eating, drinking, shaving, make up, tooth cleaning, etc. The robot is under experimentation in the National Hospital of Paraplegics in Toledo.

UC3M Humanoid
- The full size 21 DOF humanoid robot of the University Carlos III of Madrid is an autonomous robot able to walk by different type of gaits in indoor and outdoor areas, and cooperates with humans and other robots in real collaborative working environments.

Manfred
- Manfred (MAN FRiEnDly mobile manipulator) is an autonomous mobile manipulator designed to operate efficiently in environments where human manipulation capabilities are required.
Current research topics
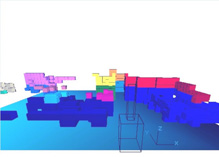
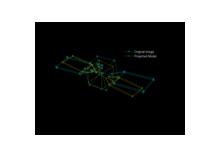
3D modeling
- Here we try to build models based on three-dimensional informacion provided by a sensor system with two objectives: build a traversable region model to navigate in complex indoor or outdoor environments and build three-dimensional models for manipulation.

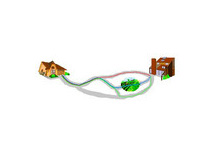
Artificial muscles
- The main goal of this research area is the development of Electroactive Polymer (EAP) based Bio-inspired Intelligent Materials and Mechanisms

Assistive portable robots design
- The main goal of this research area is to design and develop really portable assistive robotic devices able to be transported easily by the user in his daily trip from house to office, providing the assistance in both environments.

Automatic 3D buildings design
- The main objective of this research area is the development of a system that automates the construction process. The system seamlessly integrates architectural design, planning and simulation tools.

Automatic modular buildings assembly
- The main objective of this research area is to introduce the new automation and robotics processes in the construction sector. The aim is not only to increase productivity, but also to improve work safety and hygiene conditions.
Biomedical Engineering
- Biomedicine and robotics are destined to find common points and give rise to hybrid disciplines with a wide scope of results in medicine, molecular biology and robotics itself.

Computer aided mechatronics design
- The main objective of this research area is the development of a system that automates the service robot design process, (non available in the market). The design will be from different points of view: electro-mechanical, control and structural.

Control of assistive robots
- The assistance of disabled, elderly and persons with special needs become to be one of the most important service application of the robotic systems in the near future.

Control of mobile manipulators
- The force-torque control of mobile manipulator, and coordinated control of the mobile base and the manipulator permits to perform active human-mobile manipulator cooperation through intention recognition.

End user programming of social robots
- One of the main challenges faced by social robots is how to provide intuitive, natural and enjoyable usability for the End-User. In the human normal environment, social robots could be important tools for education and entertainment(edutainment).

Gaits of humanoids
- The research in stable walking of humanoid robots is in general non-solved problem. Our research deals with the implementation of stable gait on 12 DOF Rh-0 and Rh-1 bipedal locomotion system.

Hardware architecture for humanoids
- Humanoid robot is complex system that must be carefully designed. Development of a hardware architecture is the first step to the integrated control system of a humanoid robot.

Humanoid head design
- This research area deals with the development of a robotic head for the robot Rh-1. The head will be equipped with various sensors, such as cameras, microphones etc.

Humanoid motion planning
- The humanoid robot bipedal locomotion requires computationally advanced and efficient algorithms to solve both, the global navigation with obstacle avoidance and the local mechanics movements problems.

Kinematic&dynamic design of humanoids
- This research area deals with the development of a kinematic and dynamic design of humanoids robot Rh-0 and RH-1.

Motivations and emotional control
- The main objective of this project is to design a decision making system, based on emotions and using unsupervised learning, for an autonomous and social robot.

Multimodal human-robot interaction
- We have developed an Autonomous Personal Robot, Maggie, that is going to interact with the user in a Peer-To-Peer way. That implies multimodality, personality, adaptivity, autonomy, learning ability, cooperativeness, reactivity and proactiveness.

Remote human-robot interaction
- Remote interaction is a special type of human-robot interaction, where the human and the robot are separated by physical barriers but linked via telematic technologies.

Robotic hands
- Design, Development and Control of Robotic Hands with
special characteristics.
One of the most intense ambitions in robotic researches is to imitate a human hand, due to its several possible uses and its ability to interact with the environment.

Software architecture for humanoids
- Design and development of the software needed to control a humanoid robot; from a friendly and easy-to-use HMI to the embedded components to command all joints movement.

Software architectures
- In the interaction between humans and robots it is necessary a mechanism to specify robot's task. The AD Architecture has been developed at RoboticsLab, it is a framework to modeling a set of skills that describe a Robot's performance.
Topological navigation
- Nowadays topological navigation is considered as the more
natural way of navigating. Topological navigation uses a topological
representation of the environment, normally by graphs. We are working in a
full topological navigation system called AURON, base
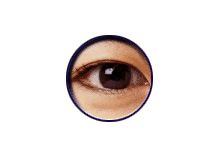
Visual human-robot interaction
- The robot needs to develop the humans communication skills in order to allow its interaction with them. One of these human skills is the human vision system,here we present our system called Cognitive Emotive Visual System.
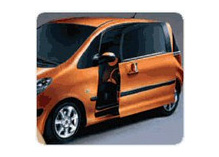
Visual tracking & servoing
- The effort that we want to improve is focuses in the development of algorithms and techniques that allows an automatic adaptation of visual systems to changing environments.
Robot types & applications

Aerospace
- The activity of the Robotics Lab in relation to Aerospace is focused in two completely different areas: visual navigation of autonomous satellites and simulation of some general systems of the Eurofighter Aircraft.
Assistive Robots
- Assistive robot is one of the most promise robotic application in near future. Since 2000, Robotics Lab developes a robot for disable and elderly people assistant (MATS), general interactive intelligent assistant (PRA), and general humanoid assistant.
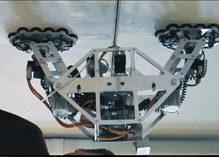
Climbing Robots
- Research in the field of climbing robots started in 1995. Since this date several robots had been developed: Roma 1 for inspection steel-based structures, Roma 2 for travel along concrete, wood, etc., and Mats robot allows moving in domestic environments.

Humanoids
- Humanoid robots program of the RoboticsLab started on 2001 by developing the 7 DOF bipedal robot Leroy. Since 2002 Rh-0 project, and later Rh-1 one, had the objective of development a 21 DOF full size robot.
Industrial Automation
- In the last few days, several collaborations have been established in Industrial Automation field as automation of construction processes and several task for automation industries.

Mobile Manipulators
- The objective of this research line is to develop advanced mobile manipulators able to operate in human environments.

Mobile Robots
- Mobile Robotics is one of the most research fields of the Robotics Lab. Our group works are focused in control architectures, topological navigation, multimodal interaction and emotions in robotics.

Personal Robots
- Current robots are present mainly in factories. Future robots will be also in our homes as personal companions to entertain and help us in our daily life

Robots in Construction
- The R&D activities of the RoboticsLab in the field of robotics & automation in construction started in earlies 90s. Several industrial and EU projects related with automation of the pre-fab parts, and modular building design & erection had been done.
Projects

HYPER
- Hybrid NeuroProsthetic and NeuroRobotic Devices for Functional Compensation and Rehabilitation of Motor Disorders

ARCADIA
- Robotic Cognitive Assistant for Persons with Special Needs
RoboCity2030-II
- Service robots upgrading urban standards of living (Stage II)

TechnoFusión
- Technofusión (the National Centre for Fusion Technologies) in the Madrid region, is conceived as the infrastructure required to develop the technologies needed in future commercial fusion reactors.

HANDLE
- Developmental pathway towards autonomy and dexterity in robot in-hand manipulation.

Arquimedes Cth

AROS
- A new approach to social robotics
mTBM-Guidance
- Advanced ranged navigation system for microtunnelling boring machines

SEDUCE
- Systems for the detection of explosives in centers and public infrastructures

PCAET
- Coherent path planning and evolutive adaptation of tasks in mobile manipulators

CARHU
- Active co-operation between humanoid robots and humans in collaborative working environments

Tunconstruct
- Technology Innovation in Underground Constriction

Robot@CWE
- Advanced Robotic Systems in Future Collaborative Working Environments

ROBAUCO
- Autonomous and cooperative robots

Robocity2030
- Service robots upgrading urban standards of living

I3CON
- Industrialised, Integrated, Intelligent Construction

ASIBOT-HNPT
- Assistive robot for National Paraplegic Hospital of Toledo
ManuBuild
- Open building manufacturing
Geost-MC
- Multidimensional City: Intelligent tuneling

R2H
- Peer to Peer Robot-Human Interaction

ASIROV
- Acoplamiento y Agarre de Satélites mediante Sistemas Robóticos basado en Visión (ASIROV)

PSA Cathedra
- Analyse d'Aspect Automatique

Rh-1
- Development of the humanoid robot for cooperative tasks with humans
IPCIS
- Sensor-based Integration of Planning and Interaction Control in Advanced Mobile Manipulators

3DMan
- Manipulation of 3D Objects using vision based control techniques

EADS
- Simulations of ECS, ETC and LFE systems

EU-JP Construct
- European Union - Japan R&D construction consortium
MARS-DW
- Martian dust wiper

IVLM
- International Virtual Laboratory on Mechatronics

Sidemar
- Integrated system of assisted mechatronic design for oriented computer to automatic optimising of structure of service robots

PRA
- Personal Robotic Assistant

Rh-0
- Autonomous and intelligent humanoid robot for industrial and service applications

RISANAR
- Satellite Recognition and Inspection via Relative Autonomous Navigation
MANFRED
- Autonomous mobile manipulator for operation in difficult environments(MANFRED)

MATS
- Flexible mechatronic assistive technology system to support persons with special needs in all their living and working environments

IECAT
- Innovative Educational Concepts for Autonomous and Teleoperated Systems

TOPO
- Topological Navigation of Mobile Robots

GRC 2
- Factory automation of pre-fab GRC pieces for construction industry

FutureHome
- Housing for Europe in the next century: Affordable, high quality homes for all

ROMA 2
- Multiple autonomous self-supported low-cost robots system for applications in coordinated non-conventional tasks

ManMove
- Mobile manipulator Otilio development

ROMA 1
- Multifunctional self-supported climbing robot able to travel in complex environments